Bonjour,
Si on regarde ton schéma tu cumules 2 problèmes:
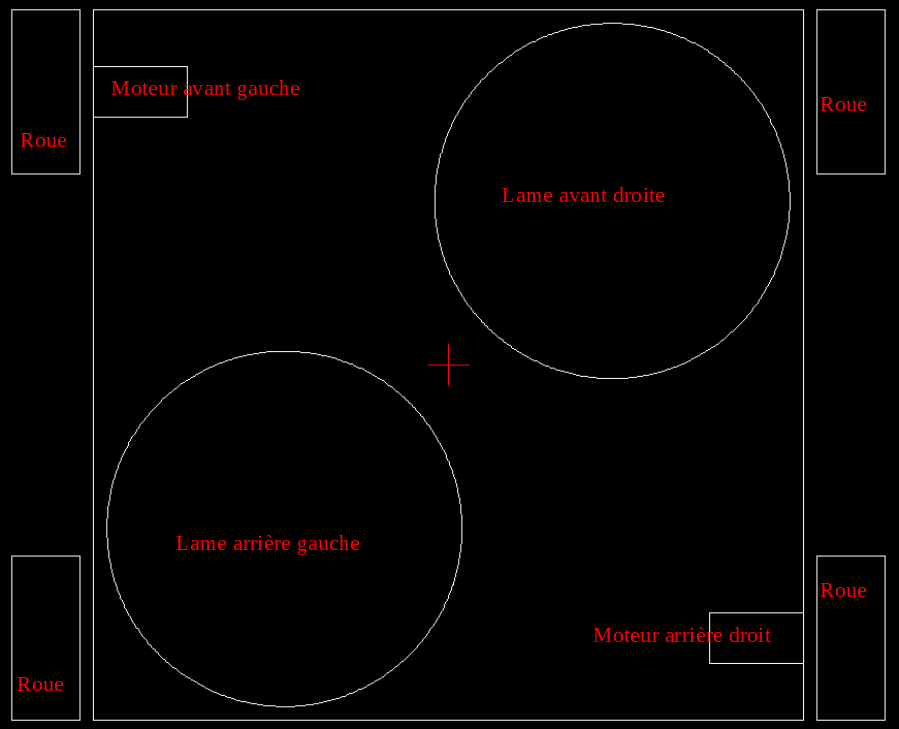
- 1) La traction n'est pas bien répartie.
- 2) Le centre de rotation n'est pas bien défini.
Si tu opte pour un robot à 4 roues alors il te faudra au moins un moteur par roue soit 4 moteurs (ou alors choisir d'entraîner 2 roues d'un même côté par moteur au moyen d'une transmission par courroie par exemple), ce qui remédie au problème n°1 mais pas totalement au n°2. Dans ce cas fait bien attention aux dimensions de ton robot car si tu éloignes trop les roues avant des roues arrière, ton robot aura beaucoup de mal à tourner (surtout en terrain exterrieur).
Si tu ne peut / ne doit utiliser que 2 moteurs alors le mieux dans ce cas, sera de les placer dans l'axe central du chassis, ton robot sera donc à 3 roues dont 2 motrices, c'est à dire avec une roue folle à l'arrière (configuration classique en robotique).
L'avantage de cette configuration c'est que quand tu voudras que ton robot tourne sur lui même alors son centre de rotation sera au centre de ton robot entre les deux moteurs (là où tu a fait ta croix sur ton schema) ce qui remédie aux 2 problèmes. L'inconvénient c'est qu'il sera moins coupleux que dans le premier cas.
On peut aussi y voir un autre avantage qui est que ses 3 roues seront toujours en contact avec le sol offrant donc une meilleur stabilité. Si le robot est à 4 roues alors il faudrait un système de suspension pour garentir un contact de toutes les roues avec le sol.
Concernant les roues que tu souhaite utiliser, elles seraient bien pour un robot à 3 roues dont 2 motrices mais poserait problème pour un robot à 4 roues motrices pour tourner (il faut que les roues glisse un peu dans ce cas).
Je ne connais pas ce modèle mais en général ce genre de roues ne sont pas pleines. Si ton robot est lourd, les pneus s'écraseront sous son poids. Il faudra donc les remplir (sur mon robot j'ai utilisé de la mousse polyuréthane).
L'intérêt qu'il y a à avoir le centre de rotation qui coïncide avec le centre du robot, c'est d'avoir une certaine précision quand on fait de l'odométrie ou de l'asservissement. Si le centre est connu les calculs seront relativement simple sinon c'est la grosse galère.
Comme tu peut le voir via mon avatar, j'ai pas mal cogiter sur ces problèmes 
Bonne continuation.