Mon contenu
Mon contenu Homme
Homme




 Posté par
Posté par Bonjour,
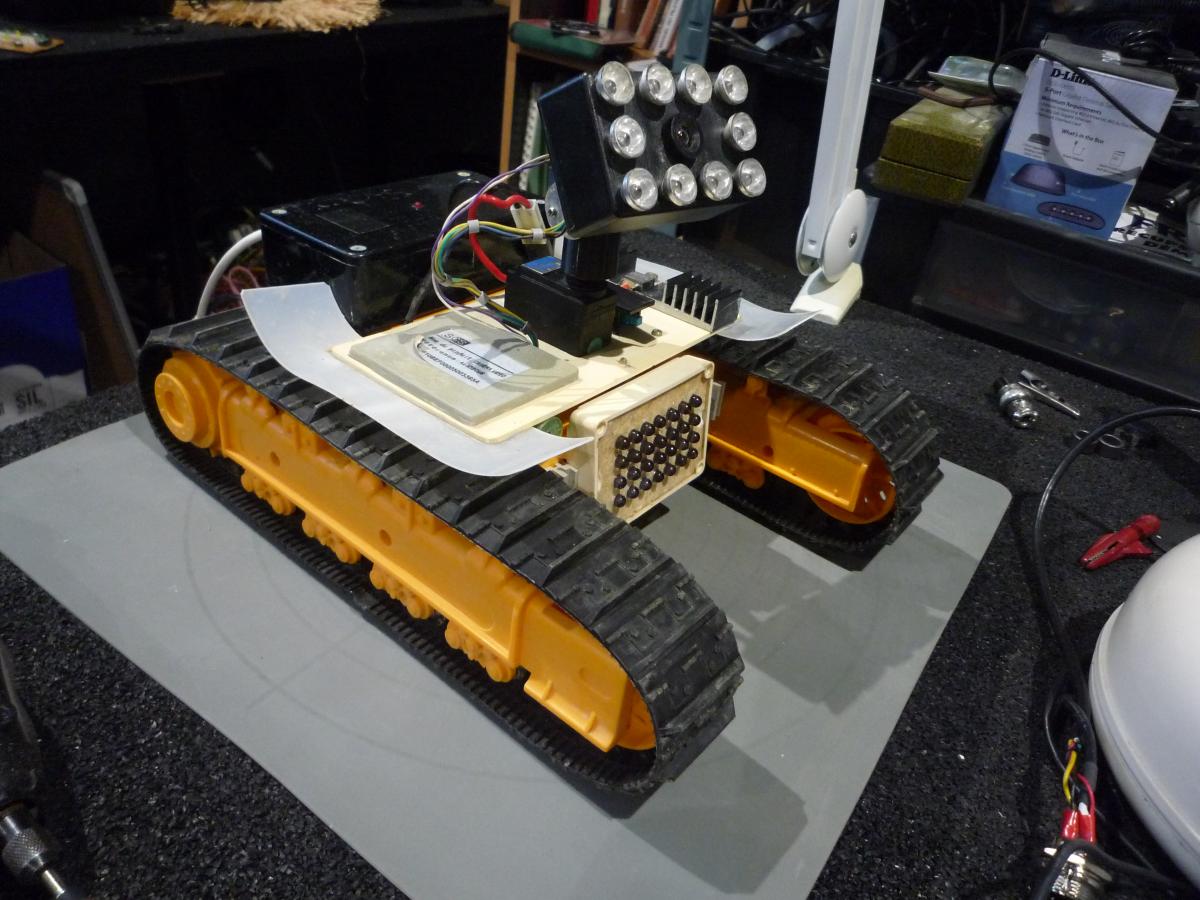
Suite à la description de ma 1ère réalisation dans ma présentation,
voici le projet d'évolution du petit véhicule d'exploration souterraine.
Le principe des chenilles n'est pas la solution la plus efficace pour les terrains très accidentés,
à part peut être avec des systèmes à plusieurs chenilles articulées.
Après avoir envisagé 6, 8, voire 10 roues motrices articulées par paires façon chenille (l'insecte),
J'ai opté pour un modèle tout fait, un scrawler, depuis que j'ai découvert sur le net cette discipline de radio modélisme,
le scrawling. Les capacités de franchissement incroyables de ces engins en font la base idéale pour mon projet.
La 2ème amélioration est le passage des commandes 'tout ou rien' en commandes proportionnelles, afin d'agir sur la vitesse
de déplacement et permettre une manipulation plus fine de la caméra.
Le circuit vidéo de la version 1 ayant fait ses preuves, je vais le conserver. Simple, fiable, ne nécessitant aucun programme et comprenant
une fonction éclairage infra rouge et un circuit audio micro + HP.
La difficulté pour moi concerne la partie commande proportionnelle. Après recherches et toujours pour utiliser le moins de fils possible,
j'envisage l'architecture suivante:
Joystics --- Arduino --- Max 485 --- liaison RS 485 (2fils) --- Max 485 --- Arduino + carte de commande moteurs + différents capteurs
J'avais discuté lors d'un salon avec le concepteur d'un petit sous-marin professionnel filoguidé, qui avait lâché, sous la contrainte, le mot Pixhawk, qui pourrait
remplacer l'Arduino embarqué. Il gérait les moteurs de propulsion/orientation, la caméra (servos + vidéo) ainsi que différents capteurs.
J'en appelle maintenant à l'expertise des honorables membres de ce forum.
Cette architecture vous paraît-elle cohérente ?
Que peut-on dire sur le Pixhawk ? serait-il plus adapté ?
Il y aura certainement de la programmation à faire, je suis totalement inculte en la matière, pouvez-vous me guider ?
Je vous remercie d'avance chaleureusement pour votre participation et j'espère que ce sujet pourra être utile à d'autres.