
 Mon contenu
Mon contenu Homme
Homme
Voici une photo du tout premier PAMI. C'est pour le moment une coquille vide, je ferais un update quand on aura corrigé nos problèmes électronique.


 Posté par
- 10 janvier 2026 - 06:17
Posté par
- 10 janvier 2026 - 06:17
[Update] Des nouvelles de l'équipe et présentation du robot 2026 !
Bonjour à tous,
Après plusieurs mois de silence sur le forum, il est temps de vous faire un petit update sur l'équipe et, surtout, sur les robots !
Au niveau de l'équipe, pas de grands changements. Nous conservons le même objectif : performer avec des technos originales tout en nous amusant.
Du côté du robot, nous avons validés de nombreuses briques l'année dernière sur lesquelles nous allons pouvoir capitaliser pour aller un peu plus loin cette année.
Mécanique
Nous sommes globalement satisfaits de notre base roulante, mais nous avons décidé de passer de 3 à 4 roues. L'objectif est de pouvoir accélérer plus fort tout en minimisant le glissement. En effet, en configuration 3 roues, le robot avait parfois du mal à tenir son cap selon la direction de la trajectoire.
Électronique
L'électronique a globalement bien fonctionné l'an passé, malgré quelques défauts de jeunesse. Nous conservons donc la même architecture en y apportant des correctifs. Un de nos objectifs majeurs cette année est l'intégration de servos Feetech dans nos actionneurs. Cela implique la production de nouvelles cartes électroniques. Comme pour le reste du projet, vous pourrez retrouver tout cela en libre accès sur notre GitHub.
Logiciel Je découpe la présentation en deux parties :
Temps réel : Nous travaillons à l'exploitation du second cœur du Zynq afin de corriger quelques bugs liés à la latence (notamment sur notre filtre de Kalman). Pas de révolution architecturale ici, la base est déjà solide.
Stratégie haut niveau : C'est là que se trouvent les vraies nouveautés ! Nous avons investi dans des caméras JeVois Pro pour gagner en agilité et mieux nous adapter à l'environnement de match. Celles-ci devront renvoyer en temps réel la position et la couleur des éléments de jeu à ramasser, en communiquant directement avec la Raspberry Pi qui gère la stratégie.
La grande nouveauté : Les PAMI C'est notre gros chantier de l'année. Nous avons décidé de concevoir des PAMI holonomes équipés de LIDAR LD06 pour la localisation. Nous nous inspirons beaucoup de ce qu'a montré l'équipe TDS-team-72. Ces petits robots tourneront sur un Raspberry Pi Pico 2W et, petit bonus esthétique, ils auront l'apparence de Minions !
Coté communication nous essayons de poster régulièrement sur notre compte instagramafin de partager l'avancé des robots.
Clairement le défi pour nous cette année est de réussir à tout faire avant la coupe. On ne s'en rendait pas compte, mais faire des PAMI c'est très TRES chronophage ^^.
Posté par
- 13 mai 2025 - 09:34
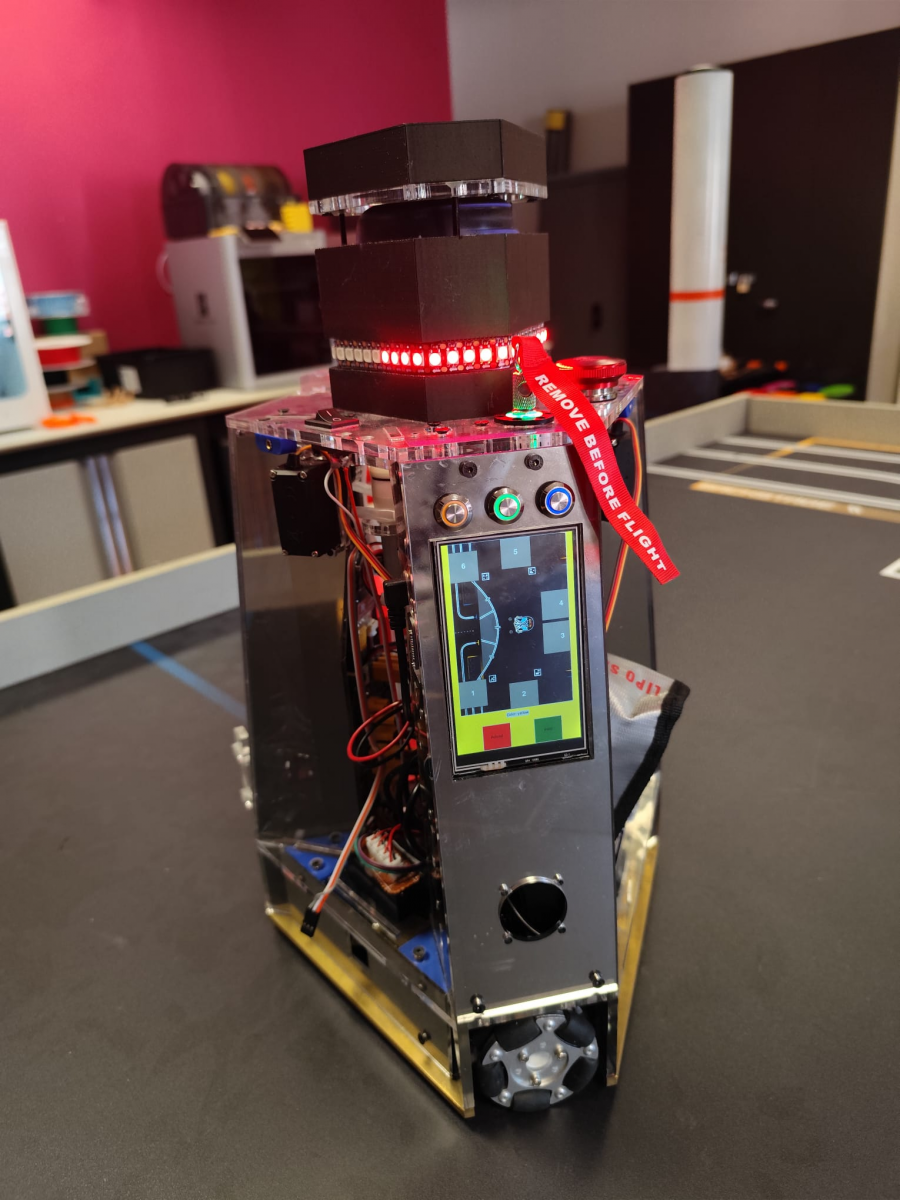
Voici une photo du robot actuellement, avec une vue sur l'écran de sélection de script de match.
Posté par
- 13 mai 2025 - 09:32
Bonjour à tous,
Petite présentation de l’équipe de robotique Les Opossums.
L’équipe s’est créée il y a maintenant presque un an, avec pour objectif d’engager un robot à la prochaine édition de la Coupe de France de Robotique, qui aura lieu fin mai 2025. D’abord composée de deux membres ayant déjà participé à plusieurs éditions de la Coupe dans d’autres structures, l’équipe s’est peu à peu étoffée pour finalement compter cinq membres à l’aube de la compétition.
Depuis sa création, l’objectif de l’équipe est assez simple : concevoir un robot qui permette à chacun de s’amuser sans aucune limite (mis à part celles décrites par le règlement). Nous voulions donc un robot capable d’aller vite, de se déplacer de manière élégante et doté d’une électronique originale par rapport à ce qu’on a l’habitude de voir à la Coupe de France.
Voici une petite présentation des caractéristiques du robot :
Nous avons fait le choix de partir sur un robot holonome à trois roues, équipé de moteurs M2006 P36, qui sont parfaits pour un robot de la Coupe de France. Ils sont compacts, puissants et très simples à utiliser. La communication se fait à l’aide d’un bus CAN, et ils renvoient à 1 kHz leur vitesse, couple et position, ce qui facilite grandement l’intégration mécanique (pas besoin de rajouter des codeurs externes). Ils nous permettent d’atteindre des vitesses plutôt correctes, puisque nous sommes parvenus à aller à 1,5 m/s sur une table de jeu, tout en conservant une assez bonne précision de déplacement.
La localisation se fait via un LiDAR A2M12 placé dans le mât du robot. Nous utilisons des balises externes au plateau de jeu afin de trianguler la position du robot. Cela nous permet, lors de fortes accélérations ou décélérations, de compenser la dérive odométrique.
Le robot possède deux cartes électroniques qui lui servent de cerveau.
Notre robot est donc multi-langage : il mêle C, C++ et Python pour la partie logicielle, ainsi que du VHDL pour la partie matérielle.
Côté logiciels utilisés :
La mécanique est conçue sous SolidWorks,
L’électronique a été développée avec KiCad,
La suite Vitis/Vivado a été utilisée pour le Zynq.
Enfin, l’objectif pour nous cette année (en plus de s’amuser, bien évidemment) est de tester au maximum nos choix technologiques afin de valider notre architecture pour aller plus loin l’année prochaine.




