Mon contenu
Mon contenu Homme
Homme
(J'entends dire : "Déjà ??!??")
L'avantage c'est qu'il va pouvoir voyager avec moi.
Une âme bien charitable m'a vendu tout un kit qui n'a pas servi, à part pour le test.
J'exposerais ici les différentes étapes de la construction.
Voici les différents organes que j'aurais sous peu à ma disposition :
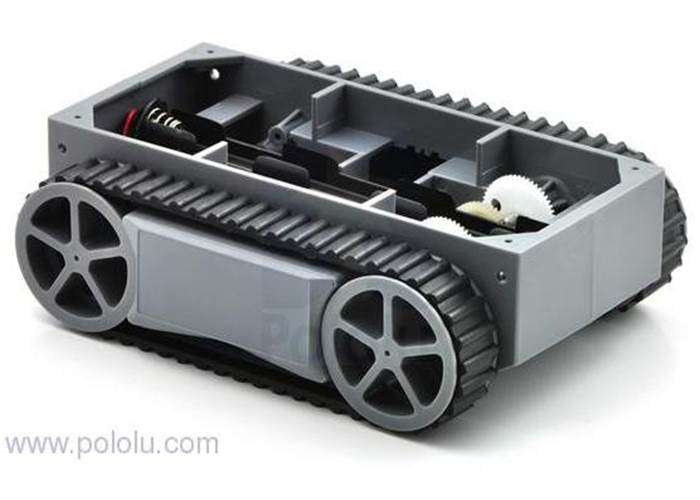
-Un châssis à chenille, le célèbre RP5
-Les deux moteurs-réducteurs intégrés au châssis.
-Quelques grilles supports pour le chassis (Pololu).
-Deux contrôleurs moteurs HB-25 Parallax câblés en Tamiya.

-Un Ping))) de chez Parallax.

-Un accu 7.2v NiMh presque neuf.
J'ai déjà :
-Arduino Uno.
-Sraps flexible.
-Chargeur Ni-Mh.
-Les petits composants électroniques courants.
Il me manquera :
-Une tourelle Pan/Tilt (Si un mec cool peut m'en filer une !
 )
)Voilà, je vais dans un premier temps le monter et faire un programme de test.
J’espère que ce petit projet sera intéressant, que ce soit pour moi ou pour la communauté.