

 Mon contenu
Mon contenu Non spécifié
Non spécifié
Voici un projet que je suis entrain de réaliser , ce poste a pour but de discuter sur sa réalisation et la programmation de celui-ci.
Pour avoir au final un robot performant.
------------------
Un modérateur du forum peut suprimer mon message dans la partie électronique , pour pas avoir de doublon ?
-----------------
Bonne lecture
Robot MicroMouse :
Objectif final :
Réaliser un petit robot qui doit résoudre un labyrinthe en un temps record.
Voici une petit video
Objectif :
Commencer par un programme de avec des réglés de base puis rajouter petit a petit de nouvelle règle pour rendre le robot plus performant.
Et ainsi comprendre petit a petit le fonctionnement.
Règle programmation suivie par le robot :
Règle de base :
-Sa position initiale est toujours dans le coin inférieur gauche
-Il connaît la taille du labyrinthe (5*5)
-Le robot peut se déplacer à gauche, à droite, en haut et en bas, pas de diagonale
-Il suit une direction jusqu'à ce qu'il ait possibilité tournée
-Il ne revient en arrière que s'il n'a pas le choix
-Utiliser la technique consistant à suivre un mur soit gauche , soit le droit.
Règle a ajouter petit a petit pour faire évoluer le robot :
-Sa position initiale est sans importance
-Il ne connait pas la taille du labyrinthe
-Il garde en mémoire tout ce qu'il visite
-Il ne retourne pas dans un chemin qui est repéré comme « menant nulle par » sauf s'il n'a pas le choix (aucune possibilité de bouger)
-S'il y a 3 murs autour d'une case, alors cette case est grillée elle est repérer comme « menant nulle part »
-Utiliser l'algorithme A* ou la méthode de flood-fill.
-Chaque case grillée compte comme un mur pour ses voisines
-Le robot peut se déplacer en diagonal
-Les dédales sont utilisées de tels sortes que la technique consistant à suivre un mur ne fonctionne pas
Le robot :
Carte électronique :
Module chipKIT Max32™ :
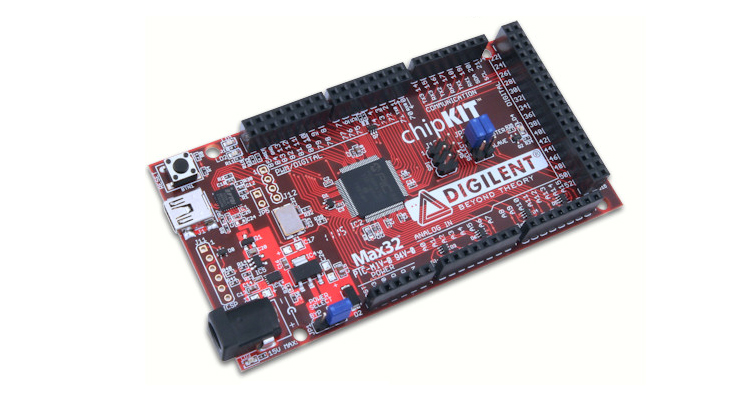
Caractéristiques:
- Microcontrôleur: 32 bits - PIC32MX795F512 (Microchip™)
- Vitesse d'horloge: 80 MHz
- Mémoire Flash: 512 K
- Mémoire RAM: 128 K
- Nombres d'entrée/sorties: 83
- 6 UART (avec mode IrDA)
- 5 ports I2C™
- 4 ports SPI™
- 2 Comparateurs
- 2 ports CAN
- 10/100 Ethenret MAC
- USB 2.0 OTG
- Horloge RTC interne
- Timers internes 16/32 bits
- Led libre d'utilisation
- Compatible avec les programmes développés pour Arduino™
- Compatible avec les platine Shield en 3,3 V pour Arduino™
- Programmable également sous MPLAB™ (avec PICkit 3™)
Pour plus d'info
Platine chipKIT Basic I/O shield™
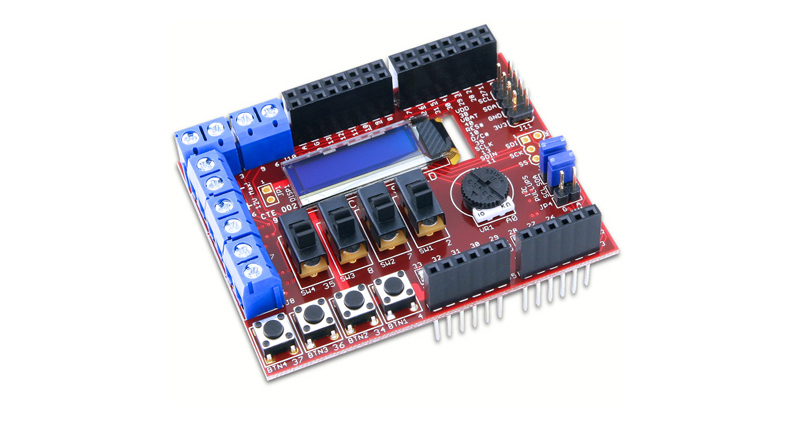
Contenu des périphériques présent:
- 1 mémoire EEprom I²C 256 Kbit (non volatile)
- 1 afficheur graphique OLED 128 x 32 pixels
- 1 capteur de température I²C
- 1 dispositif de chaînage I²C
- 4 transistors FET
- 1 potentiomètre
- 4 boutons poussoirs
- 4 interrupteurs à glissières
- 8 Leds
- Divers borniers à vis
Plus d'info ici
Carte de Puissance : JS-MOTOR

Features
-Independently control two stepper motors
-Separate control signals
-Hardware or software selectable phase, enable, and direction signals
-Drive 1.5A per motor
-Current limit can be adjustable by potentiometer
-2 phase or 1-2 phase
-Wide range of motor power (9 to 25V)
-Power (for logic) indicator LED
-Manual, schematic, 14 pin flat cable and HIF3F 14 pin header included
Manuel
Carte d’alimentation :
En cours de réflexion
Carte avec les capteur :
En cours de réflexion
Partie diverse :
Châssis:
Photo a venir , j’attend de recevoir le matériel
Accus :
Deux Accu Rechargeable NiMH Battery Pack: 7.2 V, 900 mAh, 3x2 AAA Cells, JR Connector
http://www.pololu.com/catalog/product/2235'>Plus d'info
Moteur :

Moteur pas-à-pas Sanyo Denki H546
Moteur unipolaire 2 phases.
Nombre de pas: 200
Angle par pas: 1,8°
Alimentation: 3,15 V
Résistance/phase: 3,15 ohms
Courant/phase: 1 A
Inductance/phase: 2,8 mH.
Couple de maintien: 0,147 N.m.
Connexion: connecteur 6 broches.
Diamètre de l'axe: 5 mm.
Dimensions: 42 x 42 x 32 mm.
Poids: 200 g.
Fiche technique
--------------------------------------------------------------------------------------------------------------
Journal du projet :
Poste le 25/10/2011 : Rédaction du cahier des charge
Actuellement l’attend la réception de tous les composant
Merci pour avoir lu la présentation de mon robot.
A bientôt,
Olivier Bogaert




