

 Mon contenu
Mon contenu Non spécifié
Non spécifié
Bonjour à tous,
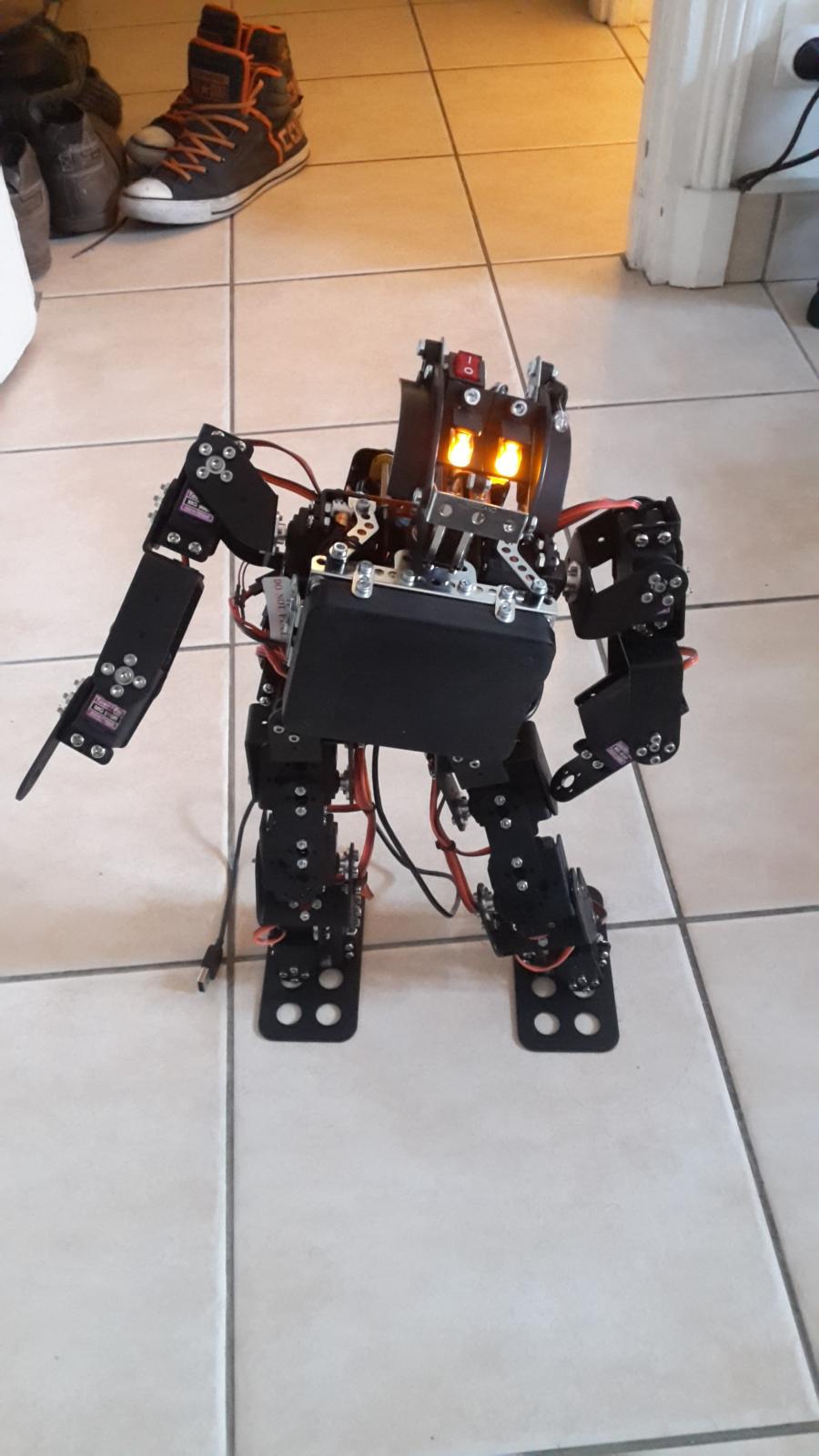
je tenais a vous présenter mon projet, un robot humanoïde programmable à moins de 300€.
vu de face :
vu de derrière:
J'ai acheté beaucoup de matos en chine, mais mon budget est pour le moment respecté.
Mon matériel :
Structure/moteurs :
- Structure mécanique de fixation servo (assez générique, des packs complet existe pour 50-80€ sur Internet en chine)
- 1 boite de meccano voiture de course
- 13 servo MG996R + 4 servo MG995 (juste pour les jambes car ils trainaient chez moi)
Les jambes en questions : 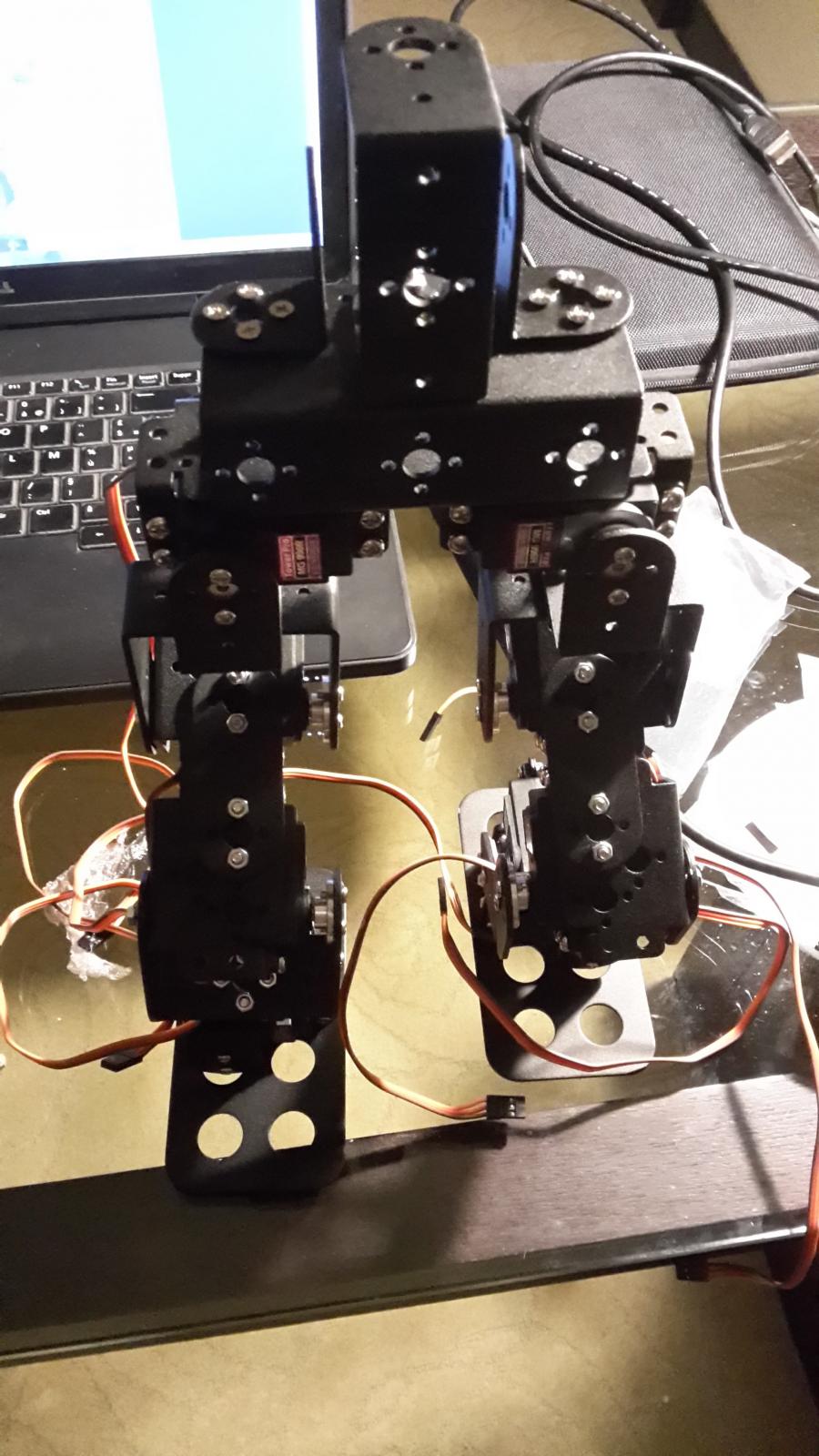
Commande/puissance :
- Carte servo Pololu 24 channels
- Nanopi 2 (une version chinoise du raspberry plus puissante avec wifi, Bluetooth et surtout 2fois plus petite !
EDIT : J'ai supprimé le Nanopi 2, trop de probléme avec
Nanopi2 VS Raspberry Pi zéro: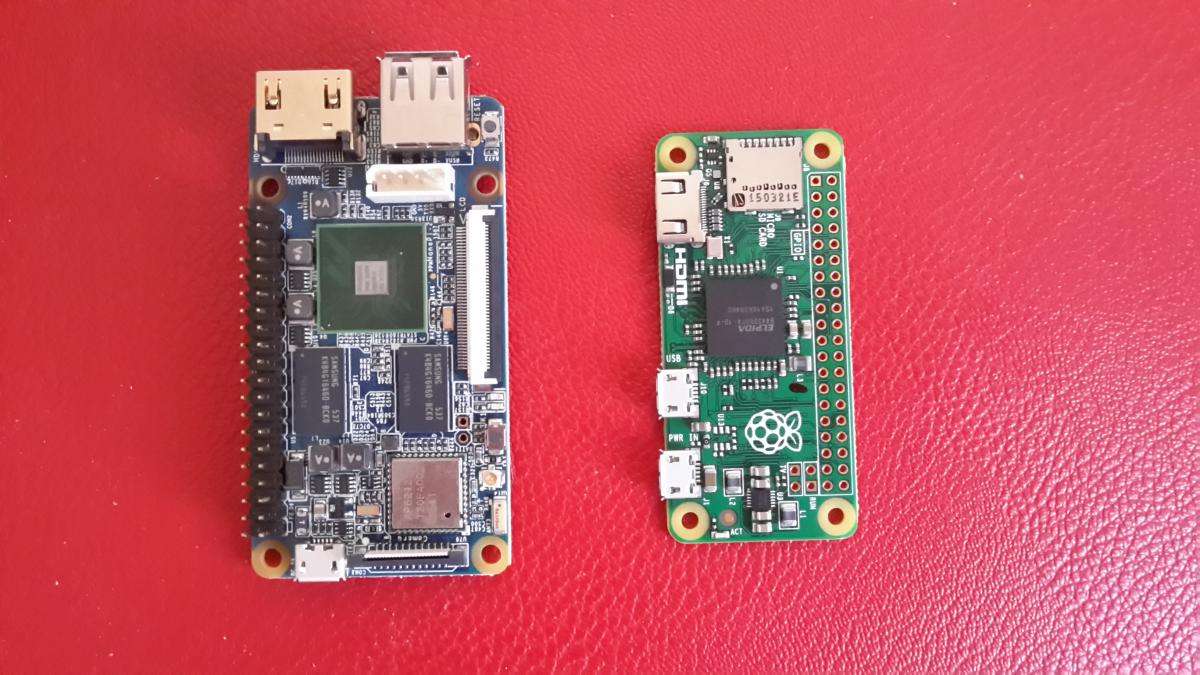
- Batterie lipo 3.5A - 2S - 5C (faible pouvoir de décharge mais suffisant pour moi, mais surtout très petite)
- Convertisseur 7.2V vers 5V 1A pour le nanopi
EDIT : Convertisseur changé
- Convertisseur 7.2V vers 5V 6A (qui prend des pics à 10A) pour les moteurs (les moteurs consomment entre 0.2 (asservie) et 0.7A (en mouvement, je suis à 2A tous les moteurs "ON" sans mouvement, j'en asservie souvent 10 en même temps mais n'en bouge pas plus de 3 à la fois), avec Indicateur de décharge (90% - 80%- 50% -10%)
Divers :
- Mini hub USB 3 ports
- Rallonge HDMI 15 cm
- Indicateur voyant 6V (pour m'informer de la décharge de ma batterie sur la tête du robot)
- 2 LED Orange avec résistance 360Ohms (pour alimenter en 5v mes leds)
- Lot de connecteurs et rallonges câbles moteurs, avec bouton ON/OFF
- Une vieille boite de Disque dur (qui me serve de cache)
Base de raccordement/utilisation :
J'ai installé Debian sur mon nanopi 2, connecté en USB à ma carte Pololu, sur laquelle sont connectés mes moteurs.
Je crée donc un script en C++ (merci les librairies sur le site Pololu) et envoie via port comm (connexion USB) mes ordres.
Ma manette est connecté en Bluetooth mais pas encore dans le script, et je vais connecter une camera sur mon nanopi 2 et streammer en wifi (possible via VLC en linux simplement).
Il me reste une grosse partie programmation, pour le moment il ne marche pas... Il tombe... d'ou son nom : Newton.
Je me remet doucement au C++ et je découvre Linux, du coup je traine un peu, mais ca ne fait qu'un mois que j'ai commencé ce projet, donc je n'ai pas suffisamment de retour pour vous en parler d'avantage.
Pour Finir :
Vous noterez que sa tête a été composé avec le pack de meccano ce qui lui donne une tête de voiture, mais moi j'aime bien.
Si vous n'avez pas eu assez de photo en voilà plus : 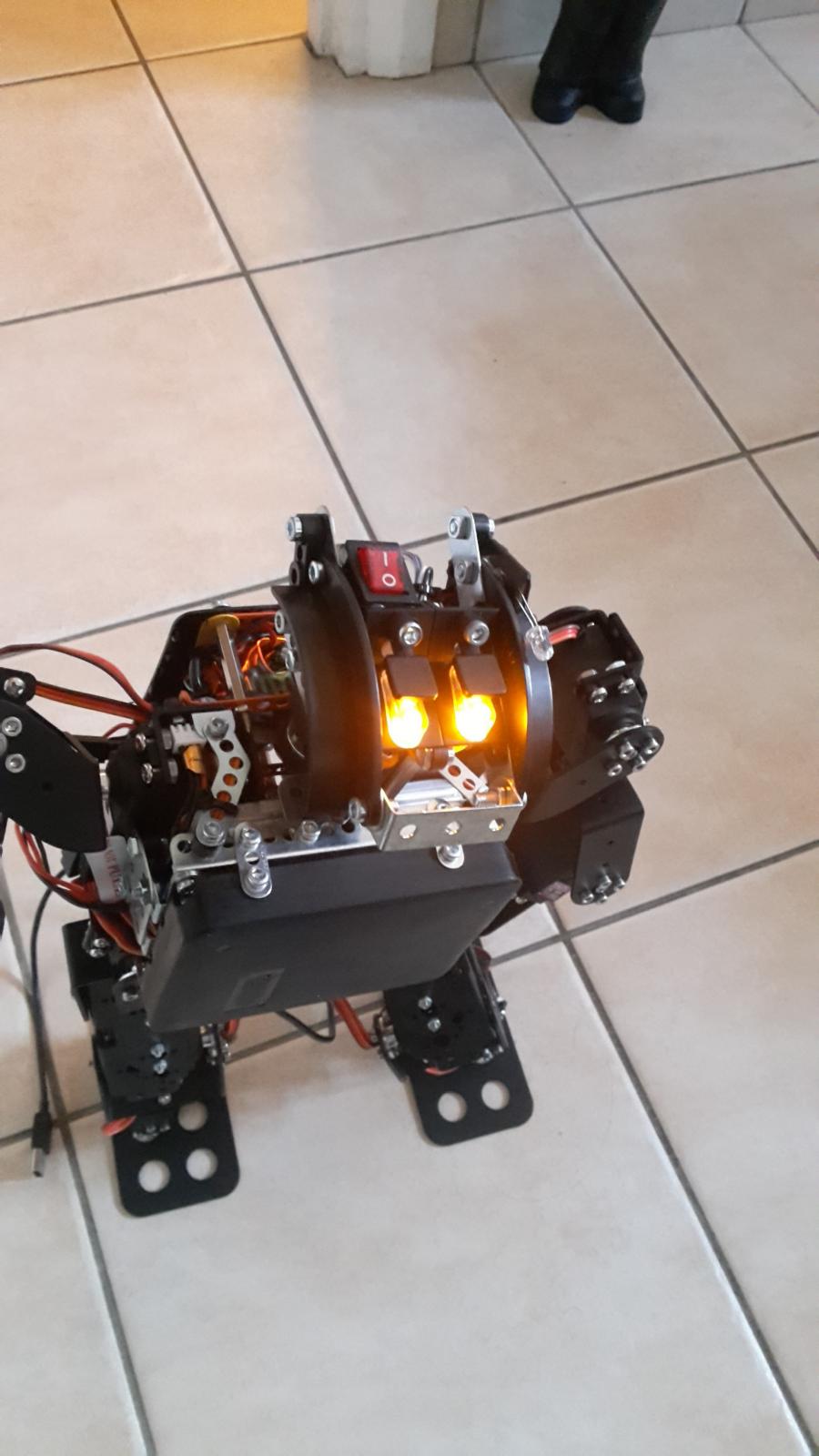



Voila





