

 Mon contenu
Mon contenu Non spécifié
Non spécifié
Vendu
Sujets que j'ai initiés
Question sur les parasites d'un capteur ir sharp
17 janvier 2013 - 05:10
Bonjour,
Voila j'ai un petit problème de parasites sur mes capteurs IR Sharp. je vous expose les faits:
je possède trois capteur IR à l'avant de mon robot (1 au centre, 1 à gauche et un autre à droite) couplés à mon arduino uno.
Pour info, j'ai soudé un condensateur comme recommandé dans la datasheet pour éviter les parasites. http://www.robotshop.com/eu/content/PDF/datasheet-gp2d120xj00f.pdf
Voir photo: http://darylrobotproject.wordpress.com/2012/12/09/daryl-et-son-chassie-finalise/p1020268/
J'ai l'algo suivant:
Je fais avancer mon robot, puis dans mon code j'ai:
avec
Ça marche plutôt pas mal, mais entre le moment ou mon robot avance, et la détection d'un obstacle (et donc l'arrêt du robot) j'ai 150ms qui se sont écoulé (3*50ms), ce qui est assez conséquent pour mon robot qui avance relativement vite.
j'ai donc fait un petit test en réduisant mes delay(50) par des delay(5) pour voir.
La, j'ai constaté que ca partait complètement en cacahuète (mon robot s'arrête sans cesse car la mesure du capteur gauche tombe sous le seuil de sécurité que j'ai programmé).
Bon la je me dis bizarre. Je coupe les moteurs, idem toujours le problème, donc pas des parasites moteurs...
Je pense à un problème dinterférence entre les trois capteurs IR.
Pour en avoir le coeur net, je pose mon robot sur ma table (sans obstacle devant) Voir photo de mon robot plus haut.
Pour comprendre imaginez le robot devant vous la tête au dessus, (avant du robot vers l'avant).
Je met mon doigt sur le capteur IR se trouvant sur la droite du robot -> le capteur IR gauche déconne toujours à plein tube
Je met mon doigt sur le capteur IR se trouvant au milieu du robot (sous le capteur ultrason) -> le capteur IR gauche marche parfaitement! />
/>
Il s'agirait donc bien d'un problème dinterférence entre le capteur du milieu et gauche?
Ce problème napparaît pas lorsque j'ai mes delay à 50.
Est-ce le rayon du capteur du milieu qui arrive dans le capteur de gauche, car la prise de mesure du capteurs gauche se fait trop tôt?
Je pense qu'en mettant des delay de 50, la probabilité que de tomber sur une mesure parasite est vraiment réduite.
En supprimant le delay, je fais plus de mesures, j'ai donc plus de probabilité de tomber sur une mesure erroné.
Y'aurait-il une solution pour éviter ces parasites? je pense que j'aurais du inverser les capteur gauche et droite afin que les rayons se croisent et pour que les capteur du milieu et gauche ne soient pas dans le même "sens". Seulement ca m'embête dapporter cette modification.
On m'a conseillé de mettre la pin à high avant de prendre la mesure puis de la remettre à low après la mesure (pour chacun des capteurs) afin de ne pas les parasiter entre eux. Est-ce la bonne solution?
Merci pour votre aide.
Voila j'ai un petit problème de parasites sur mes capteurs IR Sharp. je vous expose les faits:
je possède trois capteur IR à l'avant de mon robot (1 au centre, 1 à gauche et un autre à droite) couplés à mon arduino uno.
Pour info, j'ai soudé un condensateur comme recommandé dans la datasheet pour éviter les parasites. http://www.robotshop.com/eu/content/PDF/datasheet-gp2d120xj00f.pdf
Voir photo: http://darylrobotproject.wordpress.com/2012/12/09/daryl-et-son-chassie-finalise/p1020268/
J'ai l'algo suivant:
Je fais avancer mon robot, puis dans mon code j'ai:
rightSensorCm = getRightIRSensor(); delay(50); centerSensorCm = getCenterIRSensor(); delay(50); leftSensorCm = getLeftIRSensor(); delay(50); ... puis algo de comparaison...
avec
int getLeftIRSensor()
{
int leftSensorValue;
leftSensorValue = irValueToCm(analogRead(leftSensorIr));
sendValue('X',leftSensorValue);
return leftSensorValue;
}
...
Ça marche plutôt pas mal, mais entre le moment ou mon robot avance, et la détection d'un obstacle (et donc l'arrêt du robot) j'ai 150ms qui se sont écoulé (3*50ms), ce qui est assez conséquent pour mon robot qui avance relativement vite.
j'ai donc fait un petit test en réduisant mes delay(50) par des delay(5) pour voir.
La, j'ai constaté que ca partait complètement en cacahuète (mon robot s'arrête sans cesse car la mesure du capteur gauche tombe sous le seuil de sécurité que j'ai programmé).
Bon la je me dis bizarre. Je coupe les moteurs, idem toujours le problème, donc pas des parasites moteurs...
Je pense à un problème dinterférence entre les trois capteurs IR.
Pour en avoir le coeur net, je pose mon robot sur ma table (sans obstacle devant) Voir photo de mon robot plus haut.
Pour comprendre imaginez le robot devant vous la tête au dessus, (avant du robot vers l'avant).
Je met mon doigt sur le capteur IR se trouvant sur la droite du robot -> le capteur IR gauche déconne toujours à plein tube
Je met mon doigt sur le capteur IR se trouvant au milieu du robot (sous le capteur ultrason) -> le capteur IR gauche marche parfaitement!
/> Il s'agirait donc bien d'un problème dinterférence entre le capteur du milieu et gauche?
Ce problème napparaît pas lorsque j'ai mes delay à 50.
Est-ce le rayon du capteur du milieu qui arrive dans le capteur de gauche, car la prise de mesure du capteurs gauche se fait trop tôt?
Je pense qu'en mettant des delay de 50, la probabilité que de tomber sur une mesure parasite est vraiment réduite.
En supprimant le delay, je fais plus de mesures, j'ai donc plus de probabilité de tomber sur une mesure erroné.
Y'aurait-il une solution pour éviter ces parasites? je pense que j'aurais du inverser les capteur gauche et droite afin que les rayons se croisent et pour que les capteur du milieu et gauche ne soient pas dans le même "sens". Seulement ca m'embête dapporter cette modification.
On m'a conseillé de mettre la pin à high avant de prendre la mesure puis de la remettre à low après la mesure (pour chacun des capteurs) afin de ne pas les parasiter entre eux. Est-ce la bonne solution?
Merci pour votre aide.
Projet DRP Daryl Robot Project
09 décembre 2012 - 12:47
Bonjour à tous,
Je me suis lancé depuis peu dans un projet robotique (DRP pour Daryl Robot Project).
Pour faire rapide, je suis en train de construire un robot autonome, basé sur Arduino Uno, et ayant la particularité d'être piloté via un UMPC (viliv S5) depuis une application développée par mes soins en JAVA. (communication grâce à la lib Java RXTX)
J'ai choisi cette implémentation car je suis très à l'aise avec java et la prog en générale. Mais par contre je suis un newbie total en électronique.
Si mon projet vous intérésse, vous pouvez aller jeter un coup d'oeil sur mon blog: http://darylrobotproject.wordpress.com/
J'ai créé ce blog pour expliquer la démarche globale de mon projet, pour expliquer comment aborder certaines problématiques, mais également pour expliquer comment faire fonctionner certains éléments (arduino, contrôleur, modules, java...). En effet, j'ai parfois eu beaucoup de mal à trouver des tutos sur certains éléments.
J'essaye de mettre le blog réguliérement à jour, et de faire quelques vidéos.
N'hésitez pas à apporter vos critiques que ce soit sur le robot, ou bien le blog.
Côté robot, je pense avoir passé le plus dur désormais, même s'il me reste certaines problématiques à résoudre.
Merci aux personnes du forum qui m'ont conseillé.
@++ critok />
/>
Je me suis lancé depuis peu dans un projet robotique (DRP pour Daryl Robot Project).
Pour faire rapide, je suis en train de construire un robot autonome, basé sur Arduino Uno, et ayant la particularité d'être piloté via un UMPC (viliv S5) depuis une application développée par mes soins en JAVA. (communication grâce à la lib Java RXTX)
J'ai choisi cette implémentation car je suis très à l'aise avec java et la prog en générale. Mais par contre je suis un newbie total en électronique.
Si mon projet vous intérésse, vous pouvez aller jeter un coup d'oeil sur mon blog: http://darylrobotproject.wordpress.com/
J'ai créé ce blog pour expliquer la démarche globale de mon projet, pour expliquer comment aborder certaines problématiques, mais également pour expliquer comment faire fonctionner certains éléments (arduino, contrôleur, modules, java...). En effet, j'ai parfois eu beaucoup de mal à trouver des tutos sur certains éléments.
J'essaye de mettre le blog réguliérement à jour, et de faire quelques vidéos.
N'hésitez pas à apporter vos critiques que ce soit sur le robot, ou bien le blog.
Côté robot, je pense avoir passé le plus dur désormais, même s'il me reste certaines problématiques à résoudre.
Merci aux personnes du forum qui m'ont conseillé.
@++ critok
/>
[VENDU] ROVIO pour pièces
02 octobre 2012 - 08:55
Bonjour,
Je vends une base de ROVIO pour pièces (je l'ai récupéré HS). Je voulais m'en servir comme base pour mon projet, mais je pensais qu'il était plus gros et il est trop petit pour mon projet />
/>
La base est en très bon état (roues nikels et plastique nikel). Elle est composé de:
- 3 moteurs à réduction (couple pas énorme) -> fonctionnent
- 3 encodeurs (double? 4 fils) à roues derrière chaque moteur -> non testé surement OK mais pas sûr
- une carte d'alimentation -> non testée peut être KO (du 5V en sortie jai limpression)
- une batterie nimh 6V 3000mah 5 cellules -> non testée surement OK mais pas sûr
- capteur infrarouge-> non testée surement OK mais pas sûr
- petit haut parleur plat -> non testée surement OK mais pas sûr
Très bonne base pour commencer un petit robot, grâce aux moteurs et encodeurs.
Je donne en plus (non testé et non garantie de fonctionnement):
- platine où tous les éléments étaient connectés -> non testée peut être KO
- platine permettant au Rovio la recherche d'un marqueur au plafond -> non testée peut être KO
- platine avec carte Wifi et caméra -> non testée peut être KO
- connectique micro port USB -> non testée peut être KO
- platine alimentant 6 petites LED bleues -> non testée surement OK mais pas sûr
- petit micro -> non testée surement OK mais pas sûr
- un moteur à engrenage supplémentaire avec encodeur -> moteur OK mais encodeur non testé surement OK mais pas sûr
- le bras démonté + pièces plastiques + visserie en vrac
Faire offre
Je vends une base de ROVIO pour pièces (je l'ai récupéré HS). Je voulais m'en servir comme base pour mon projet, mais je pensais qu'il était plus gros et il est trop petit pour mon projet
/> La base est en très bon état (roues nikels et plastique nikel). Elle est composé de:
- 3 moteurs à réduction (couple pas énorme) -> fonctionnent
- 3 encodeurs (double? 4 fils) à roues derrière chaque moteur -> non testé surement OK mais pas sûr
- une carte d'alimentation -> non testée peut être KO (du 5V en sortie jai limpression)
- une batterie nimh 6V 3000mah 5 cellules -> non testée surement OK mais pas sûr
- capteur infrarouge-> non testée surement OK mais pas sûr
- petit haut parleur plat -> non testée surement OK mais pas sûr
Très bonne base pour commencer un petit robot, grâce aux moteurs et encodeurs.
Je donne en plus (non testé et non garantie de fonctionnement):
- platine où tous les éléments étaient connectés -> non testée peut être KO
- platine permettant au Rovio la recherche d'un marqueur au plafond -> non testée peut être KO
- platine avec carte Wifi et caméra -> non testée peut être KO
- connectique micro port USB -> non testée peut être KO
- platine alimentant 6 petites LED bleues -> non testée surement OK mais pas sûr
- petit micro -> non testée surement OK mais pas sûr
- un moteur à engrenage supplémentaire avec encodeur -> moteur OK mais encodeur non testé surement OK mais pas sûr
- le bras démonté + pièces plastiques + visserie en vrac
Faire offre
[Help] Validation partie électronique de mon projet
02 octobre 2012 - 10:58
Bonjour,
Voila, comme évoqué dans ma présentation, je me suis lancé dans la création d'un robot autonome piloté par un arduino uno et dont l'IA (développée en Java) se trouve sur un UMPC connecté à l'arduino en serial mode.
J'aurais besoin de votre aide afin de valider la partie électronique, donc châssis/motorisation de mon projet.
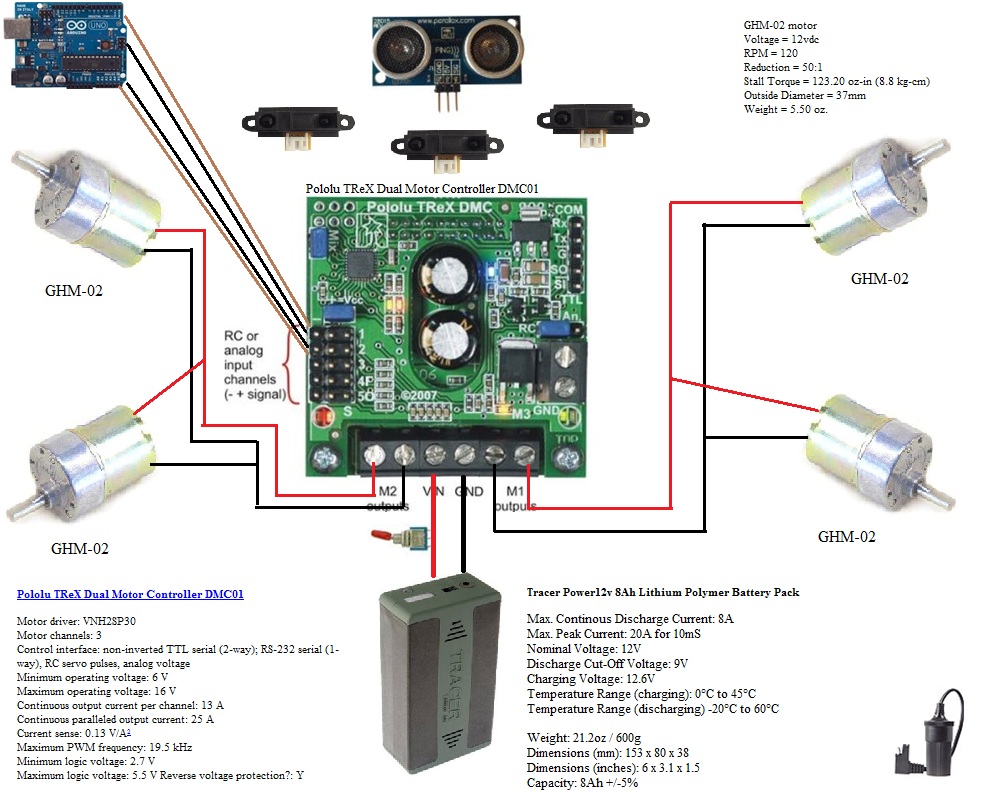
J'ai réalisé un petit croquis avec les specs des différents éléments.
J'ai quelques petites questions vis à vis de chacun des éléments:
- Moteurs: Le châssis sera un lynxmotion terminator (http://www.lynxmotion.com/p-41-terminator-sumo-kit-no-electronics.aspx) donc livré avec 4 moteurs 12V, 120RPM, 50:1. Sachant que le robot pèsera au total approximativement 2.2Kg (900g châssis terminator + 600g batterie + 436g viliv s5 + 250g délectronique + marge) les moteurs vous semblent t'il bien proportionnés pour mon projet?
- Moteurs: Sur la spec des moteurs (http://www.lynxmotion.com/images/data/ghm02.pdf) il est indiqué: The gear motor is not intended for instant reverse. The gear motor must be stopped before reversing. Cela posera t-il problème pour mon projet (déplacement simple du robot et éviter les obstacles) ?
- Contrôleur moteur Pololu Trex: Ce contrôleur vous semble t-il bien adapté à mon projet ?
- Contrôleur moteur Pololu Trex: S'agit-il bien d'un contrôleur de vitesse, donc pas besoin d'encodeur ? (je pense que oui mais j'aimerais être sûr)
- Contrôleur moteur Pololu Trex: Puis-je coupler les moteurs d'un même coté sur la même sortie? (je pense que oui vu quun côté fonctionnera de la même manière pour avancer, reculer ou tourner)
- Contrôleur moteur Pololu Trex: Pourrais-je bien le piloter depuis l'arduino? Si j'ai bien compris, pour une sortie moteur on relie un fils sur le ground de l'arduino et l'autre sur une pin PWM. Par contre, je n'ai pas bien compris comment faire pour inverser les moteurs?
- Batterie: La batterie vous semble t-elle bien dimensionnée pour mon projet? Il est indiqué qu'elle dure 50 min avec une lampe de 100w. Combien durera-t-elle sur mon robot?
- Batterie: Est-il dangereux d'utiliser une batterie LIPO pour mon projet? J'ai cru lire que ce genre de batterie pouvait facilement prendre feux... je ne suis pas forcement rassuré. Cela peut-il poser problème si le robot se retrouve bloqué (roues bloquées) ?
- Batterie: Sachant que j'ai 4 moteurs de 12v, cette batterie 12V est-elle bien adaptée?
Voila pour les questions
Sinon pour information, je pense réutiliser la connectique de l'adaptateur lumière fourni avec la batterie (voir image en bas à droite) pour le connecter au contrôleur. Mais aussi rajouter un interrupteur pour pouvoir couper le tout.
Nhésitez pas à me donner vos remarques et/ou critiques afin d'améliorer mon projet...
Merci beaucoup!
Voila, comme évoqué dans ma présentation, je me suis lancé dans la création d'un robot autonome piloté par un arduino uno et dont l'IA (développée en Java) se trouve sur un UMPC connecté à l'arduino en serial mode.
J'aurais besoin de votre aide afin de valider la partie électronique, donc châssis/motorisation de mon projet.
J'ai réalisé un petit croquis avec les specs des différents éléments.
J'ai quelques petites questions vis à vis de chacun des éléments:
- Moteurs: Le châssis sera un lynxmotion terminator (http://www.lynxmotion.com/p-41-terminator-sumo-kit-no-electronics.aspx) donc livré avec 4 moteurs 12V, 120RPM, 50:1. Sachant que le robot pèsera au total approximativement 2.2Kg (900g châssis terminator + 600g batterie + 436g viliv s5 + 250g délectronique + marge) les moteurs vous semblent t'il bien proportionnés pour mon projet?
- Moteurs: Sur la spec des moteurs (http://www.lynxmotion.com/images/data/ghm02.pdf) il est indiqué: The gear motor is not intended for instant reverse. The gear motor must be stopped before reversing. Cela posera t-il problème pour mon projet (déplacement simple du robot et éviter les obstacles) ?
- Contrôleur moteur Pololu Trex: Ce contrôleur vous semble t-il bien adapté à mon projet ?
- Contrôleur moteur Pololu Trex: S'agit-il bien d'un contrôleur de vitesse, donc pas besoin d'encodeur ? (je pense que oui mais j'aimerais être sûr)
- Contrôleur moteur Pololu Trex: Puis-je coupler les moteurs d'un même coté sur la même sortie? (je pense que oui vu quun côté fonctionnera de la même manière pour avancer, reculer ou tourner)
- Contrôleur moteur Pololu Trex: Pourrais-je bien le piloter depuis l'arduino? Si j'ai bien compris, pour une sortie moteur on relie un fils sur le ground de l'arduino et l'autre sur une pin PWM. Par contre, je n'ai pas bien compris comment faire pour inverser les moteurs?
- Batterie: La batterie vous semble t-elle bien dimensionnée pour mon projet? Il est indiqué qu'elle dure 50 min avec une lampe de 100w. Combien durera-t-elle sur mon robot?
- Batterie: Est-il dangereux d'utiliser une batterie LIPO pour mon projet? J'ai cru lire que ce genre de batterie pouvait facilement prendre feux... je ne suis pas forcement rassuré. Cela peut-il poser problème si le robot se retrouve bloqué (roues bloquées) ?
- Batterie: Sachant que j'ai 4 moteurs de 12v, cette batterie 12V est-elle bien adaptée?
Voila pour les questions
Sinon pour information, je pense réutiliser la connectique de l'adaptateur lumière fourni avec la batterie (voir image en bas à droite) pour le connecter au contrôleur. Mais aussi rajouter un interrupteur pour pouvoir couper le tout.
Nhésitez pas à me donner vos remarques et/ou critiques afin d'améliorer mon projet...
Merci beaucoup!




