

 Mon contenu
Mon contenu Non spécifié
Non spécifié
A vrai dire, nous ne sommes pas noter Mardi mais nous passons un Oral blanc afin que nos enseignants nous aident et corrigent nos erreurs, et l'idéal serait de pouvoir leur présenter notre robot.
Ne t'inquiète pas je souhaite pas te voir faire notre boulot, simplement nous sommes coincés au niveau des capteurs de contacts au niveau des branchages et des résistances.
Nous suivons le tuto de roby, la partie mécanique du robot est finie, la partie électronique au niveau de l'alimentation et des servomoteurs l'est aussi et il nous manque la partie sur les capteurs. (Infrarouge et contact)
Voici les petits capteurs de contact que nous avons:
http://www.robotshop.com/productinfo.aspx?pc=RB-Tam-71&lang=fr-CA
Voici une petite photo de notre robot à l'heure d'aujourd'hui:

Voici le schéma électronique (je crois bien que ça s'appelle comme ça ?) de notre robot, nous utilisons celui de Roby:
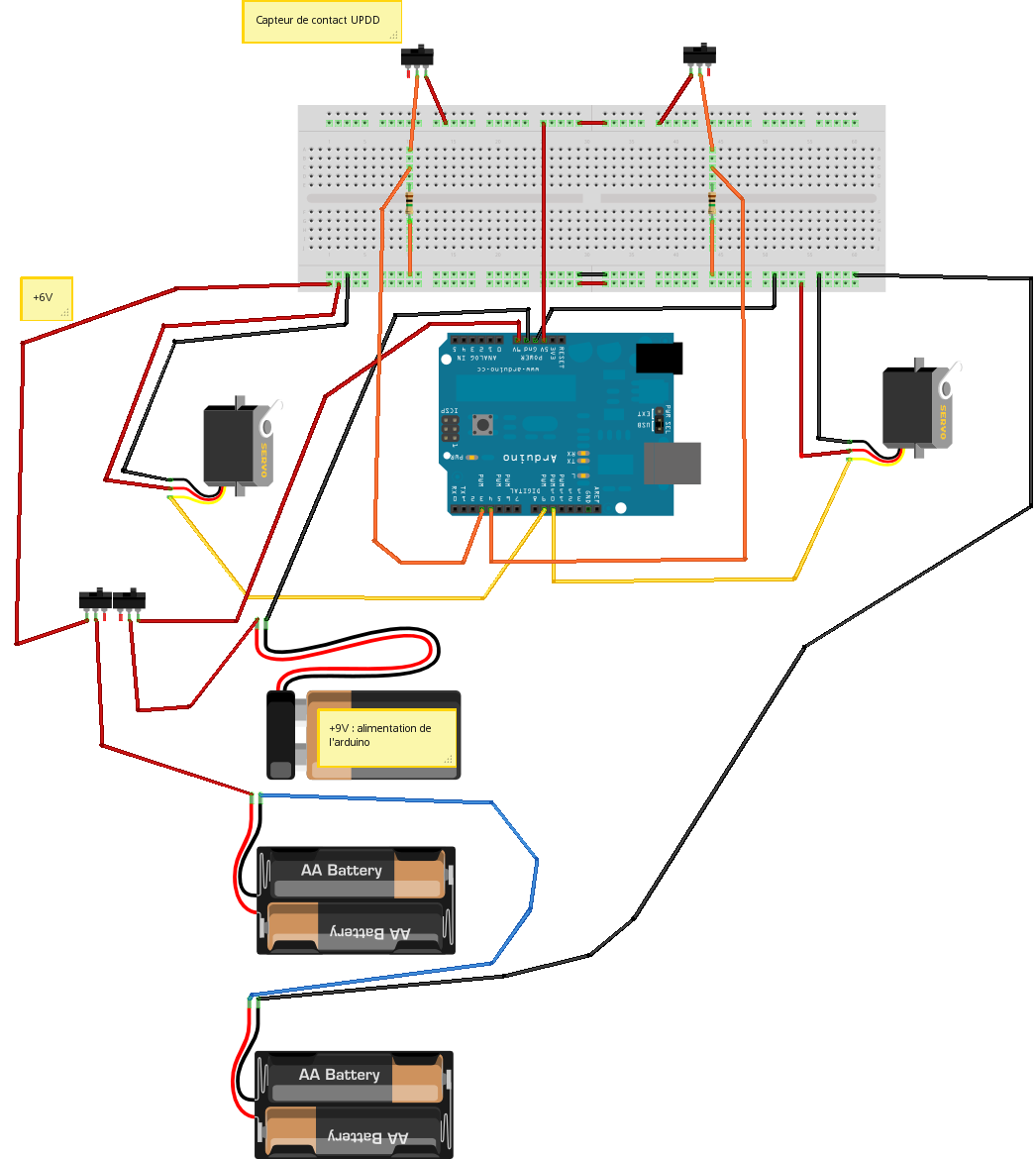
Le résultat particulier qu'on obtenait était l'activation en permanence des capteurs, le robot faisait en effet un demi tour à chaque fois
 />.
/>.D'ou mes 2 questions:
Devrions nous faire des soudures au niveau des pattes des capteurs afin de "brancher" les fils ?
Est ce que les résistances Marron Noir Verte Argent (celles utilisés dans ce schéma) pourraient convenir ?
Désolé si je ne suis pas toujours très clair :s




