Mon contenu
Mon contenu Non spécifié
Non spécifié



Bonjour à tous !
C'est avec émotion que je reviens vers vous après tout ce temps, la dernière fois que j'ai fréquenté ce forum c'était il y a 9 ans, j'avais 12 ans !
Depuis j'ai progréssé un peu dans mon coin en robotique, je fais en parallèle des études dans le sujet.
Je suis actuellement étudiant en Electronique, Energie et Automatisme à la faculté 2 de Montpellier, passionné de robotique.
Voila pas plus, je suis aussi musicien à la guitare et au piano et je suis dans l'impossibilité de vous dire sur quel pseudo j'ai pu m'enregistrer il y a 9 ans, mais je suis sur que c'était sur ce forum la ( qui a bien changé d'ailleurs, félicitation à l'équipe ! )
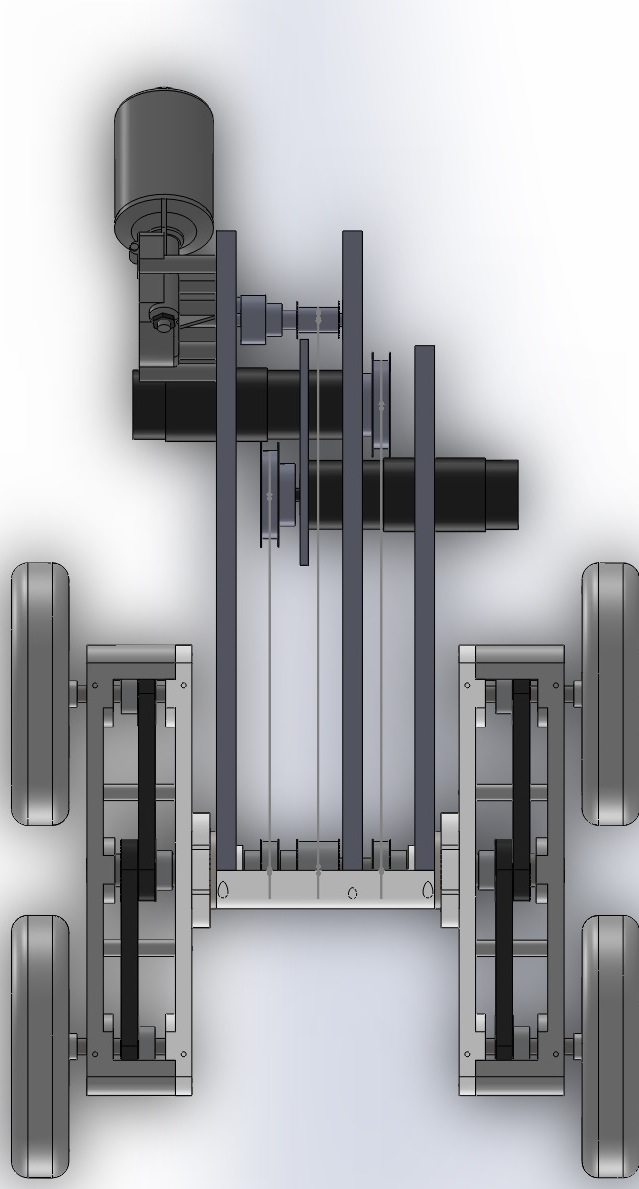
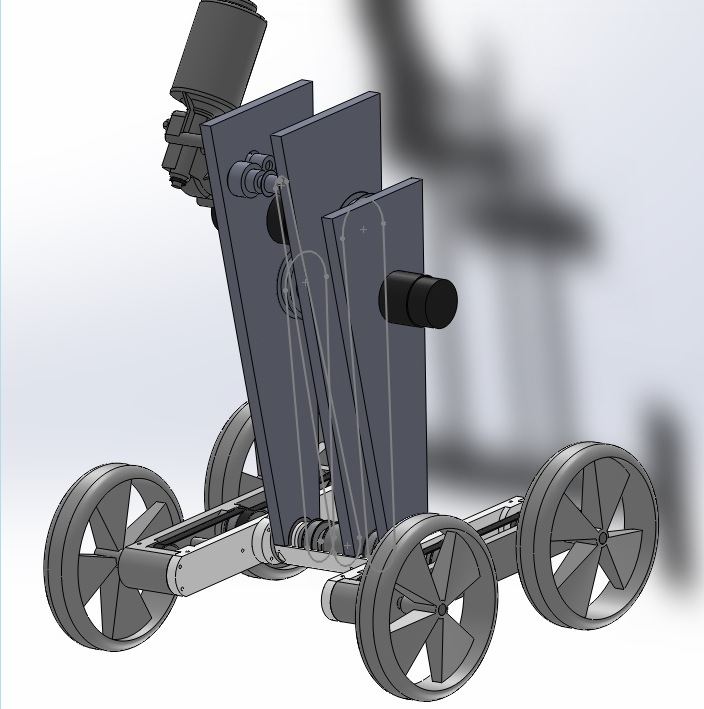
Si je suis revenu, c'est parce que j'ai un ( trop ) grand projet en cours, j'ai enfin trouvé toute la motivation pour m'y lancer, et j'ai déjà posté mes quelques questions et mon projet ici : http://www.robot-maker.com/forum/topic/9548-projet-grand-robot-grimpeur-descalier/
Si vous voulez m'aider ce sera avec plaisir ! Pour aider je suis sans prétention et beaucoup plus créatif que scientifique, mais si je vois dans les sujets que je peux apporter un peu d'aide je le ferais volontier !
A bientôt sur le forum !