Logiquement, les dûˋveloppements qui vont suivre devraient se trouver dans le chapitre prûˋcûˋdent. Vu que le nombre de pages qui le compose commence û devenir un peu trop important, il a ûˋtûˋ estimûˋ plus raisonnable pour le personnel de prendre un peu de repos et de continuer MJD 58090. Rendons-nous en salle S12ô rûˋservûˋe û l’assemblage des cartes ûˋlectroniques et des tests en vraie grandeur. C’est du sûˋrieux, car l’ordinateur de bord de JEKERT va ûˆtre placûˋ dans son environnement neuronal. Autant dire que S12 est aussi blanche que ses deux voisines S10 et S11.
Souder le micro-contacteur sur le circuit imprimûˋ principal.
 Contrairement û la chronologie qui a prûˋsidûˋ durant le dûˋveloppement du prototype, il n’y a strictement aucune raison d’attendre pour souder sur le dessous de la plaque principale le micro-inverseur qui dûˋtectera le contact entre le bouclier et le sol martien. Initialement il ûˋtait envisagûˋ de disposer sur le bouclier une petite ûˋquerre mûˋtallique sur laquelle serait immobilisûˋ le petit contacteur. Puis, lorsque les structures ûˋtaient pratiquement dûˋfinies, le bouclier muni des sabots amortisseurs de chocs, le matûˋriel dans sa configuration dûˋfinitive a montrûˋ la possibilitûˋ de souder le composant directement sur le circuit imprimûˋ cotûˋ pistes cuivrûˋes. On y gagne l’ûˋconomie de rûˋalisation d’une ûˋquerre mûˋtallique spûˋciale, et la carte ûˋlectronique forme un tout compact entiû´rement ô¨ô autonomeô ô£.
Contrairement û la chronologie qui a prûˋsidûˋ durant le dûˋveloppement du prototype, il n’y a strictement aucune raison d’attendre pour souder sur le dessous de la plaque principale le micro-inverseur qui dûˋtectera le contact entre le bouclier et le sol martien. Initialement il ûˋtait envisagûˋ de disposer sur le bouclier une petite ûˋquerre mûˋtallique sur laquelle serait immobilisûˋ le petit contacteur. Puis, lorsque les structures ûˋtaient pratiquement dûˋfinies, le bouclier muni des sabots amortisseurs de chocs, le matûˋriel dans sa configuration dûˋfinitive a montrûˋ la possibilitûˋ de souder le composant directement sur le circuit imprimûˋ cotûˋ pistes cuivrûˋes. On y gagne l’ûˋconomie de rûˋalisation d’une ûˋquerre mûˋtallique spûˋciale, et la carte ûˋlectronique forme un tout compact entiû´rement ô¨ô autonomeô ô£.
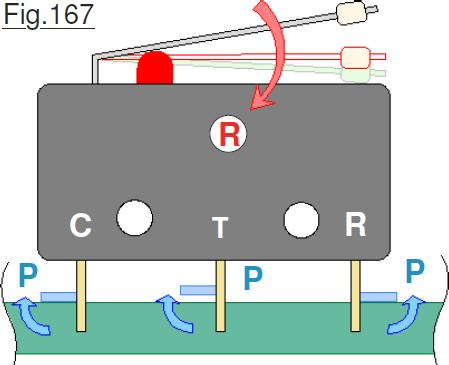
Un chtipeu de chirurgie s’impose. En effet, la course en rotation R sur ce type de composant est assez limitûˋe. Sur la Fig.167 la palette est reprûˋsentûˋe au repos. (ATTENTION : Sur la Fig.167 le circuit imprimûˋ est retournûˋ, pistes cuivrûˋes vers le haut.) Suite û une course relativement faible, quand elle passe û l’horizontale, le basculement de l’inverseur se produit. (ûpure rouge.) Observez avec attention le dûˋtail 1 sur la Fig.164 de la page 8. Il s’agit d’un petit anneau en caoutchouc qui est passûˋ comme une bague autour de la palette mobile du contacteur. (Rûˋcupûˋration !) Ce petit artifice assure deux fonctions. En premier, si on force exagûˋrûˋment sur la palette, il vient en contact avec le corps de l’inverseur et ûˋvite ainsi de le surcharger mûˋcaniquement. (ûpure coloriûˋe en vert.) Il ajoute une petite ûˋpaisseur qui optimise la course du microcontact quand ce dernier est en place sur la machine.
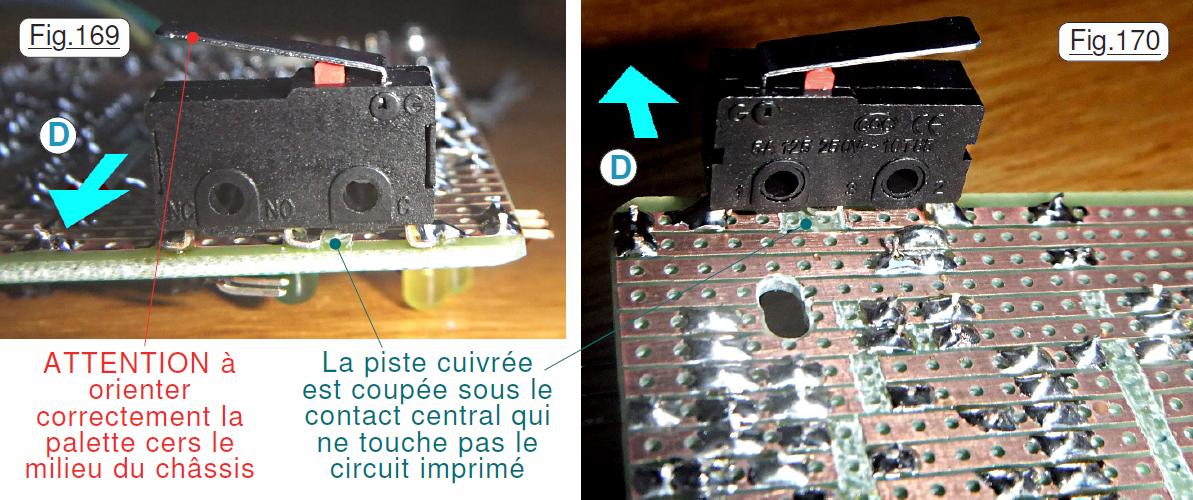
Quand la sonde sera entiû´rement achevûˋe et au repos, le bouclier ne touchera pas le sol car nous savons que les sabots surûˋlû´vent ce dernier d’environ 8mm. Le circuit imprimûˋ pour son propre compte est encore plus haut puisque ûˋcartûˋ par les entretoises de 4mm et les rondelles d’appui. La hauteur totale de l’inverseur non modifiûˋ soudûˋ ô¨ô en boutô ô£ par ses cosses de raccordement est trop importante. Pour les raccourcir elles sont pliûˋes au milieu du cotûˋ indiquûˋ sur la Fig.167 par P. Notez que la cosse centrale est volontairement plus courte pour ne pas toucher le circuit imprimûˋ car le contact travail T ne doit pas interfûˋrer ûˋlectriquement avec le reste du circuit. Du reste, pour assurer l’isolement, la piste cuivrûˋe est coupûˋe en dessous de ce contact interdit.
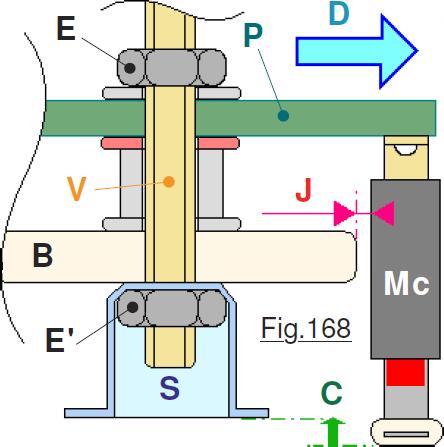
Considûˋrons le dessin de la Fig.168 pour lequel la sonde n’est pas posûˋe sur le sol, l’inverseur Mc n’est donc pas
sollicitûˋ. Quand la sonde passe en mode VEILLE elle se pose sur les sabots S du bouclier. En ajustant finement la position axiale des ûˋcrous E et E’ sur la vis V on optimise au montage la course C du micro-contacteur Mc. La plaque P du circuit imprimûˋ principal dûˋpasse vers l’arriû´re du bouclier B. Si l’on observe avec attention la Fig.169 on peut vûˋrifier que Mc n’est pas soudûˋ centrûˋ latûˋralement sur la piste cuivrûˋe, mais Dûˋcalûˋ vers l’extûˋrieur comme symbolisûˋ par la flû´che bleue. Le but de ce petit dûˋcalage consiste û assurer un jeu J assez large entre Mc et B pour ne pas risquer d’interfûˋrence matûˋrielle au montage, et faciliter au maximum l’assemblage final du circuit imprimûˋ sur la structure.
Souder les derniû´res lignes de liaison et vûˋrifier entiû´rement la carte.
Risquant une fois de plus de rabûÂcher, avant d’insûˋrer Arduino NANO sur son support et de brancher l’alimentation il importe d’effectuer une vûˋrification complû´te de la carte ûˋlectronique. Assemblez provisoirement la carte pour tester la position des ûˋcrous et surtout varifier la course surô Mc. Avec deux pointes de touche, une sur GND et l’autre reliûˋe û un +5Vcc il est facile de simuler le microcontrûÇleur et d’allumer une û une les diverses LED, vûˋrifier que le transistor du disjoncteur ûˋlectronique fonctionne correctement etc. Il faut absolument superviser l’intûˋgralitûˋ des branches du schûˋma de la Fiche nô¯17, ohmmû´tre en main. Vûˋrifier qu’û strictement aucun endroit deux pistes voisines ne soient en contact alors qu’en thûˋorie elles doivent ûˆtre isolûˋes. Ce n’est pas du temps perdu, et rien ne sera aussi valorisant que de voir prendre vie l’ensemble quand vous allez rûˋunir la petite carte par sa minuscule prise USB au P.C. pour envoyer les premiû´res consignes, et que tout va fonctionner du premier coup. (Ce fut en particulier le cas sur le prototype …) Rien ne serait plus frustrant de voir fumer un composant
parce qu’une minuscule bavure de soudure touche la piste voisine pile au mauvais endroit.ô ô .
VOTRE CIRCUIT DOIT FONCTIONNER PARFAITEMENT et DU PREMIER COUP … C’EST UN ORDRE !

ûa va cartonner !
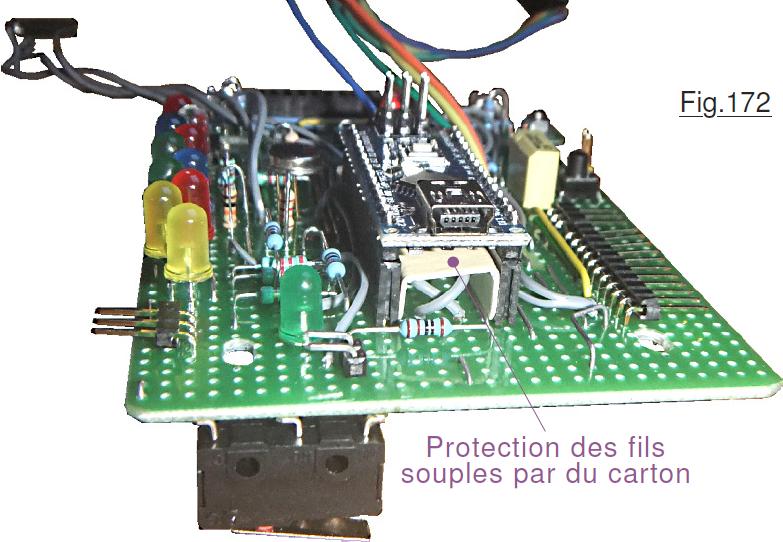 Validation confirmûˋe du circuit principal, nous allons enfin pouvoir placer l’ordinateur de bord sur les deux lignes A et B du support HE14. Avant il faut impûˋrativement faûÏonner une petit protection en carton qui plaquera les fils souples qui sont dessous et qui ne demandent qu’û se faire pincer quand on va enchûÂsser les 32 picots de branchement. La photographie Image 22.JPG montre la protection mise en place, alors que sur Image 23.JPG l’ordinateur est enfin en position. û ce stade on doit commencer les premiû´res manipulations de la campagne de tests, inutile pour le moment de connecter le multiplexeur. Par le dialogue avec le moniteur de l’IDE tester toutes les commandes qui n’impliquent pas les moteurs. Les LED pilotûˋes par S12 û S15 resteront inertes naturellement. Si on enlû´ve les ô¨ô strapsô ô£ û languette les diodes ûˋlectroluminescentes doivent s’ûˋteindre. Le mode SOMMEIL doit aussi aboutir au mûˆme rûˋsultat alors que les petits connecteurs valident û nouveau les ûˋclairages. Branchez provisoirement un potentiomû´tre et testez sa prûˋsence. Bref, l’intûˋgralitûˋ des fonctions seront passûˋes en revue les unes aprû´s les autres. Puis la petite station mûˋtûˋorologique est placûˋe sur le connecteur et ses accusûˋs de rûˋception vûˋrifiûˋs sur l’ûˋcran de l’ordinateur. Ajouter le tûˋlûˋmû´tre û ultrasons. Placer la main û proximitûˋ et enregistrez un panoramique. Ajoutez en provisoire une ligne pour brancher la centrale gyroscopique. La vie est belle, tout fonctionne et l’on on va pouvoir s’occuper des deux autres petits circuits imprimûˋs. Pensez û achever cette campagne de vûˋrifications avec ô¨ô q*ô ô£.
Validation confirmûˋe du circuit principal, nous allons enfin pouvoir placer l’ordinateur de bord sur les deux lignes A et B du support HE14. Avant il faut impûˋrativement faûÏonner une petit protection en carton qui plaquera les fils souples qui sont dessous et qui ne demandent qu’û se faire pincer quand on va enchûÂsser les 32 picots de branchement. La photographie Image 22.JPG montre la protection mise en place, alors que sur Image 23.JPG l’ordinateur est enfin en position. û ce stade on doit commencer les premiû´res manipulations de la campagne de tests, inutile pour le moment de connecter le multiplexeur. Par le dialogue avec le moniteur de l’IDE tester toutes les commandes qui n’impliquent pas les moteurs. Les LED pilotûˋes par S12 û S15 resteront inertes naturellement. Si on enlû´ve les ô¨ô strapsô ô£ û languette les diodes ûˋlectroluminescentes doivent s’ûˋteindre. Le mode SOMMEIL doit aussi aboutir au mûˆme rûˋsultat alors que les petits connecteurs valident û nouveau les ûˋclairages. Branchez provisoirement un potentiomû´tre et testez sa prûˋsence. Bref, l’intûˋgralitûˋ des fonctions seront passûˋes en revue les unes aprû´s les autres. Puis la petite station mûˋtûˋorologique est placûˋe sur le connecteur et ses accusûˋs de rûˋception vûˋrifiûˋs sur l’ûˋcran de l’ordinateur. Ajouter le tûˋlûˋmû´tre û ultrasons. Placer la main û proximitûˋ et enregistrez un panoramique. Ajoutez en provisoire une ligne pour brancher la centrale gyroscopique. La vie est belle, tout fonctionne et l’on on va pouvoir s’occuper des deux autres petits circuits imprimûˋs. Pensez û achever cette campagne de vûˋrifications avec ô¨ô q*ô ô£.
Un accouchement dûˋlicat.
Rûˋaliser le petit circuit imprimûˋ qui supporte le condensateur de 470ôçF servant de rûˋservoir ûˋnergûˋtique des servomoteurs n’a pas ûˋtûˋ immûˋdiat car on se heurte û un rûˋel problû´me de promiscuitûˋ. Agencer la solution dûˋfinitive sur le prototype a imposûˋ de nombreux montages et dûˋmontages pour aboutir û un rûˋsultat satisfaisant. Aussi, pour vous ûˋviter ces complications, nous allons procûˋder progressivement et dans l’ordre logique qui maintenant peut ûˆtre dûˋgagûˋ des alternoiments passûˋs. Posons calmement le problû´me pour lister les contraintes qu’il faut satisfaire. L’Image 24.JPG a ûˋtûˋ photographiûˋe lorsque la sonde ûˋtait entiû´rement assemblûˋe, donc en configuration dûˋfinitive. Sur le dessus du chûÂssis l’espace vital est rûˋduit par la prûˋsence des moteurs et surtout par les Jambes dont les mouvements ne doivent surtout pas ûˆtre entravûˋs. Le circuit imprimûˋ qui supporte le condensateur de 470ôçF a donc ûˋtûˋ limitûˋ û quatre pistes cuivrûˋes de largeur. ATTENTION : Les macrophotographies sont vraiment trompeuses. Les gros boulons visibles par exemple sur Image 26.JPG ne font que ûM2 mm. On voit nettement que sur Image 24.JPG le petit circuit imprimûˋ est placûˋ presque û toucher celui du multiplexeur. On remarque ûˋgalement que le condensateur rûˋservoir prûˋsente un diamû´tre plus important que la largeur du petit circuit imprimûˋ, donc il dûˋborde. Hors on doit pouvoir faire circuler des fils (Et des fils de forte section pour prûˋsenter une rûˋsistance ûˋlectrique minimale.) entre les pistes cuivrûˋes et le bornier vert.
– Ben … ya pas la place Totoche !
– Pas le choix, faut en trouver et si possible que l’assemblage soit pas trop galû´re.
Comme on ne peut pas ûˋcarter le circuit imprimûˋ du multiplexeur, la solution consiste û mûˋnager un passage pour les fils sur la petite plaque û trous. L’Image 25.JPG dûˋvoile la technique utilisûˋe. Le passage est suffisant pour laisser passer deux gros fils. Sur le prototype, cette ûˋchancrure û ûˋtûˋ pratiquûˋe alors que le circuit ûˋtait terminûˋ. Gnac, gnac, deux coups de pince coupante ! Et impossible de passer une petite lime pour peaufiner. Aussi, vous aurez le pouvoir de prûˋparer votre plaquette avant de faire les soudures, le dûˋgagement sera bien plus esthûˋtique.
Regardant la Fig.173 on ne peut que constater la grosseur des fils ûˋlectriques soudûˋs sur le petit circuit imprimûˋ. Les deux liaisons 1 et 3 relient directement le condensateur de 470ôçF au petit bornier vert du multiplexeur. Vu la section de ces fils nous sommes certains que leur l’impûˋdance sera faible. Initialement les deux autres fils 2 et 4 ûˋtaient prûˋvus comme cordon 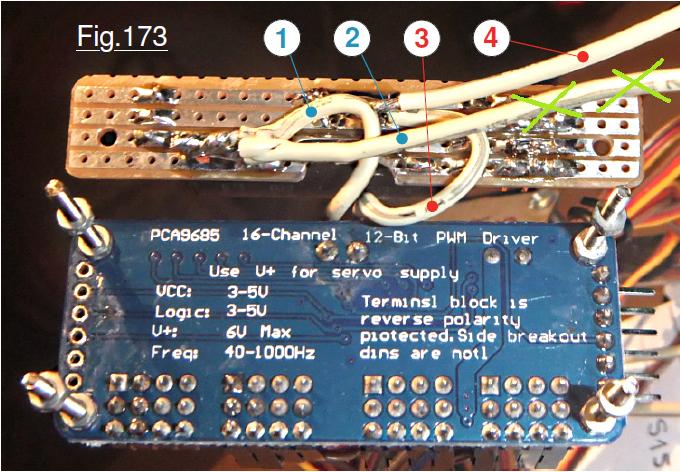 ombilical pour alimenter les servomoteurs. Au final cette solution a ûˋtûˋ abandonnûˋe car elle prûˋsentait de nombreux inconvûˋnients. Quand on effectue les essais dynamiques pour la solution finale, on constate que ce n’est pas la rûˋsistance de la ligne d’alimentation en puissance qui provoque les chutes de tension lors des appels de courant. C’est la diode de protection insûˋrûˋe en sûˋrie et l’effondrement de l’alimentation secteur. L’alimentation en autonome par accumulateur a ûˋtûˋ abandonnûˋe nous verrons plus avant pourquoi. Du coup, la grosseur de ces fils devient un inconvûˋnient car ils chargent inutilement l’arriû´re de la sonde et sont un peu trop rigides. Pour faciliter les assemblages, dûˋposes et autres alûˋas de la vie d’un prototype, c’est un petit connecteur HE14 û huit broches qui sert actuellement û brancher la ligne d’alimentation. Le gros filô 2 û ûˋtûˋ coupûˋ û quelques centimû´tres et pliûˋ sous le circuit imprimûˋ. Il n’est plus utilisûˋ. Quand au fil 4 , bien qu’un peu gros pour cet usage, il va au petit connecteur du circuit imprimûˋ principal qui sert û mesurer la tension sur les moteurs.
ombilical pour alimenter les servomoteurs. Au final cette solution a ûˋtûˋ abandonnûˋe car elle prûˋsentait de nombreux inconvûˋnients. Quand on effectue les essais dynamiques pour la solution finale, on constate que ce n’est pas la rûˋsistance de la ligne d’alimentation en puissance qui provoque les chutes de tension lors des appels de courant. C’est la diode de protection insûˋrûˋe en sûˋrie et l’effondrement de l’alimentation secteur. L’alimentation en autonome par accumulateur a ûˋtûˋ abandonnûˋe nous verrons plus avant pourquoi. Du coup, la grosseur de ces fils devient un inconvûˋnient car ils chargent inutilement l’arriû´re de la sonde et sont un peu trop rigides. Pour faciliter les assemblages, dûˋposes et autres alûˋas de la vie d’un prototype, c’est un petit connecteur HE14 û huit broches qui sert actuellement û brancher la ligne d’alimentation. Le gros filô 2 û ûˋtûˋ coupûˋ û quelques centimû´tres et pliûˋ sous le circuit imprimûˋ. Il n’est plus utilisûˋ. Quand au fil 4 , bien qu’un peu gros pour cet usage, il va au petit connecteur du circuit imprimûˋ principal qui sert û mesurer la tension sur les moteurs.
Autre contrainte absolument incontournable : Ne pas crûˋer d’interfûˋrence matûˋrielle entre le palonnier de la Hanche, ni avec le petit circuit imprimûˋ, ni avec le corps du condensateur. On peut vûˋrifier sur l’Image 26.JPG que pour assurer ce critû´re, le petit circuit imprimûˋ doit se trouver û la mûˆme hauteur que celui du multiplexeur. On comprend facilement qu’il n’y avait vraiment pas la place pour laisser passer les gros fils vers le petit bornier vert. Suite û diverses ûˋtudes gûˋomûˋtriques, il est ressorti le fait que de l’autre cotûˋ, vers l’avant, on pouvait placer un circuit imprimûˋ un peu plus large. Aussi, bien que le dessin de ce dernier n’avait pas encore ûˋtûˋ ûˋtudiûˋ, il a ûˋtûˋ dûˋcidûˋ d’installer un circuit de cinq pistes de largeur, quitte û diminuer par la suite si l’ûˋtude imposait un amaigrissement. Ce circuit û ûˋtûˋ taillûˋ et percûˋ des deux trous de fixation. Ainsi on pouvait passer û la rûˋalisation des trous de passage de tous les ûˋlûˋments sur la plaque du multiplexeur.
La suite est ici.