Enfin JEKERT va grandir et adopter sa morphologie adulte. Avec la mise en place du circuit imprimĂŠ principal, la compacitĂŠ du petit animal mĂŠcanique va prendre le dessus. Les divers modules seront rĂŠunis par des liaisons courtes. Bref, le personnel profitera des pauses journalières pour aller l’admirer derrière les vitres ĂŠtanches, installĂŠe sur son berceau en salle S6.
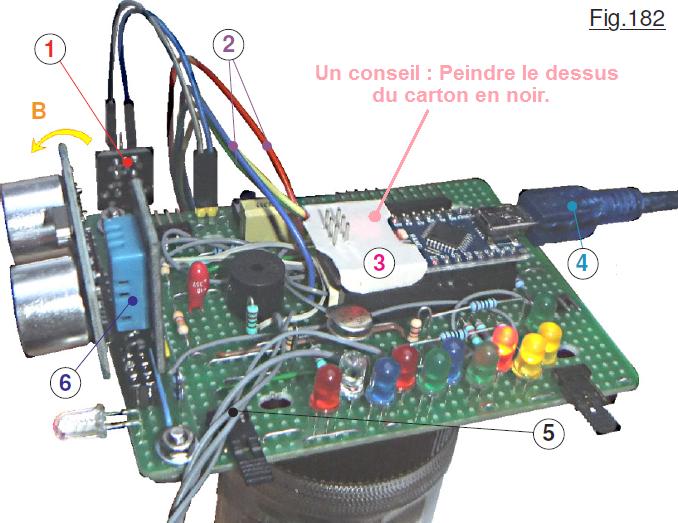 On se doute que l’assemblage final du circuit imprimĂŠ principal sur la structure reprĂŠsente une opĂŠration dĂŠlicate. Les diverses lignes qui seront reliĂŠes sur les pĂŠriphĂŠriques du dessus doivent avoir ĂŠtĂŠ correctement torsadĂŠes pour les compacter et en faire des lignes ĂŠlectriques plus rĂŠsistantes mĂŠcaniquement. Elles sont rĂŠalisĂŠes les plus courtes possibles compatible avec des branchements/dĂŠpose aisĂŠs. Avant de concrĂŠtiser l’intĂŠgration dĂŠfinitive, il importe de procĂŠder une dernière fois Ă des essais complets de l’intĂŠgralitĂŠ de l’ĂŠlectronique. Ă l’usage, on constate que les LEDs d’Arduino, et particulièrement celle qui tĂŠmoigne de la prĂŠsence du +5Vcc rayonnent une clartĂŠ trop importante. Hors cette information n’est pas vitale, d’autant plus que sur le dessus le module du circuit multiplexeur pour son propre compte visualise la prĂŠsence de l’ĂŠnergie. Pour ne pas trop diffuser sur les LEDs d’ĂŠtat de la sonde, on a, comme prĂŠsentĂŠ sur Image 30.JPG ajoutĂŠ un petit masque en carton rigide. Sur la Fig.182 le circuit imprimĂŠ principal repose sur un bocal, le module mĂŠtĂŠorologique 6 ainsi que le tĂŠlĂŠmètre Ă ultrasons sont sur le connecteur HE14. On peut observer que les lyres des contacts ĂŠlectriques prĂŠsentent un certain jeu. Ătant en porte Ă faux le petit circuit Bascule en avant et pointe vers le bas. Il faudra le maintenir vertical par un dispositif mĂŠcanique quelconque. La liaison externe 2 vers le multiplexeur est branchĂŠe par des fils provisoires longs. Le module LASER 1 pend dans le vide. On relie la mini prise USB 4 au P.C pour effectuer cette dernière campagne de
On se doute que l’assemblage final du circuit imprimĂŠ principal sur la structure reprĂŠsente une opĂŠration dĂŠlicate. Les diverses lignes qui seront reliĂŠes sur les pĂŠriphĂŠriques du dessus doivent avoir ĂŠtĂŠ correctement torsadĂŠes pour les compacter et en faire des lignes ĂŠlectriques plus rĂŠsistantes mĂŠcaniquement. Elles sont rĂŠalisĂŠes les plus courtes possibles compatible avec des branchements/dĂŠpose aisĂŠs. Avant de concrĂŠtiser l’intĂŠgration dĂŠfinitive, il importe de procĂŠder une dernière fois Ă des essais complets de l’intĂŠgralitĂŠ de l’ĂŠlectronique. Ă l’usage, on constate que les LEDs d’Arduino, et particulièrement celle qui tĂŠmoigne de la prĂŠsence du +5Vcc rayonnent une clartĂŠ trop importante. Hors cette information n’est pas vitale, d’autant plus que sur le dessus le module du circuit multiplexeur pour son propre compte visualise la prĂŠsence de l’ĂŠnergie. Pour ne pas trop diffuser sur les LEDs d’ĂŠtat de la sonde, on a, comme prĂŠsentĂŠ sur Image 30.JPG ajoutĂŠ un petit masque en carton rigide. Sur la Fig.182 le circuit imprimĂŠ principal repose sur un bocal, le module mĂŠtĂŠorologique 6 ainsi que le tĂŠlĂŠmètre Ă ultrasons sont sur le connecteur HE14. On peut observer que les lyres des contacts ĂŠlectriques prĂŠsentent un certain jeu. Ătant en porte Ă faux le petit circuit Bascule en avant et pointe vers le bas. Il faudra le maintenir vertical par un dispositif mĂŠcanique quelconque. La liaison externe 2 vers le multiplexeur est branchĂŠe par des fils provisoires longs. Le module LASER 1 pend dans le vide. On relie la mini prise USB 4 au P.C pour effectuer cette dernière campagne de 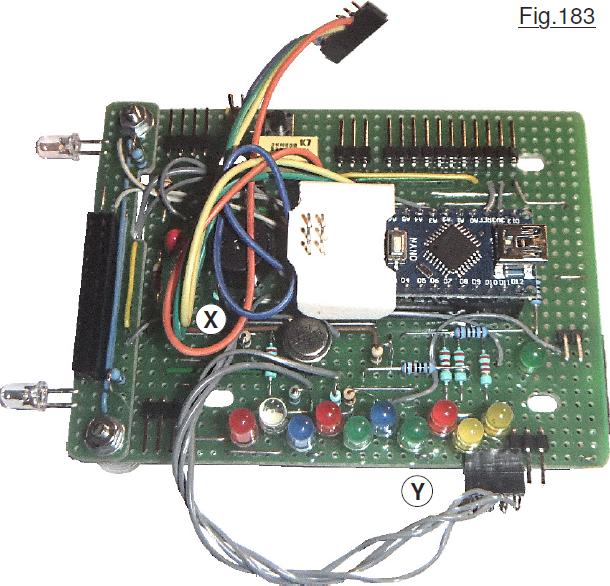 vĂŠrifications. Les LEDs de la petite carte Arduino NANO s’illuminent, ce que l’on observe en 3 Ă travers le morceau de carton. Les fils du toron 2 n’ont pas encore ĂŠtĂŠ torsadĂŠs contrairement Ă ceux de 5 qui vont au connecteur HE14 qui se branche sur S12 Ă S15 du multiplexeur. L’Image 31.JPG prĂŠsente une autre vue du circuit en cours de dernière vĂŠrification pour le valiser et passer Ă l’assemblage. Quand la certitude prĂŠdomine, on retire les transducteurs, le LASER et tout ce qui se dĂŠbranche. Avant de procĂŠder Ă l’assemblage, la ligne qui va au multiplexeur est soigneusement ÂŤÂ compactĂŠe  en X. Par ailleurs, le plus sĂťr moyen de ne pas avoir de mauvaise surprise avec la ligne qui se branche sur S12 Ă S15 du multiplexeur consiste Ă la brancher provisoirement sur le connecteur du ÂŤÂ strap  de coupure de la LED verte. Comme montrĂŠ en Y de la Fig.183 un seul picot suffit. Puis, on a placĂŠ les quatre ĂŠcrous et les quatre rondelles ĂM3 sur les vis longues de la structure. Tous les outils sont ĂŠtalĂŠs sur le bureau. On prend JEKERT retournĂŠe dans la main, on amène tendrement le circuit imprimĂŠ principal, on vĂŠrifie bien qu’aucun petit fil souple n’est pincĂŠ. On peut vĂŠrifier sur Image 32.JPG que le petit condensateur de filtrage rouge passe bien entre les corps des deux servomoteurs. L’on place alors les rondelles isolantes rouges ainsi que les entretoises. On ajoute les rondelles mĂŠtalliques d’appui et JEKERT est en configuration ÂŤÂ sur le dos  pour mettre en place PROVISOIREMENT le bouclier. (Pour bien comprendre la manipulation, consultez la Fig.189 qui prĂŠsente la sonde dans la posture permettant de rĂŠaliser cette phase de finalisation de la structure du corps du petit robot.) En effet, ainsi complĂŠtĂŠe, la sonde sera pratiquement en apparence dĂŠfinitive. On pourra la placer sur son bouclier et continuer l’intĂŠgration des autres ĂŠlĂŠments, rĂŠaliser les lignes ĂŠlectriques non encore disponibles. Ce n’est que tout Ă la fin, JEKERT ĂŠtant entièrement terminĂŠe, que l’on aura peut ĂŞtre Ă redĂŠmonter le bouclier pour modifier le cordon ombilical. Comme il n’y aura que les quatre ĂŠcrous infĂŠrieurs Ă dĂŠposer, ce sera facile.
vĂŠrifications. Les LEDs de la petite carte Arduino NANO s’illuminent, ce que l’on observe en 3 Ă travers le morceau de carton. Les fils du toron 2 n’ont pas encore ĂŠtĂŠ torsadĂŠs contrairement Ă ceux de 5 qui vont au connecteur HE14 qui se branche sur S12 Ă S15 du multiplexeur. L’Image 31.JPG prĂŠsente une autre vue du circuit en cours de dernière vĂŠrification pour le valiser et passer Ă l’assemblage. Quand la certitude prĂŠdomine, on retire les transducteurs, le LASER et tout ce qui se dĂŠbranche. Avant de procĂŠder Ă l’assemblage, la ligne qui va au multiplexeur est soigneusement ÂŤÂ compactĂŠe  en X. Par ailleurs, le plus sĂťr moyen de ne pas avoir de mauvaise surprise avec la ligne qui se branche sur S12 Ă S15 du multiplexeur consiste Ă la brancher provisoirement sur le connecteur du ÂŤÂ strap  de coupure de la LED verte. Comme montrĂŠ en Y de la Fig.183 un seul picot suffit. Puis, on a placĂŠ les quatre ĂŠcrous et les quatre rondelles ĂM3 sur les vis longues de la structure. Tous les outils sont ĂŠtalĂŠs sur le bureau. On prend JEKERT retournĂŠe dans la main, on amène tendrement le circuit imprimĂŠ principal, on vĂŠrifie bien qu’aucun petit fil souple n’est pincĂŠ. On peut vĂŠrifier sur Image 32.JPG que le petit condensateur de filtrage rouge passe bien entre les corps des deux servomoteurs. L’on place alors les rondelles isolantes rouges ainsi que les entretoises. On ajoute les rondelles mĂŠtalliques d’appui et JEKERT est en configuration ÂŤÂ sur le dos  pour mettre en place PROVISOIREMENT le bouclier. (Pour bien comprendre la manipulation, consultez la Fig.189 qui prĂŠsente la sonde dans la posture permettant de rĂŠaliser cette phase de finalisation de la structure du corps du petit robot.) En effet, ainsi complĂŠtĂŠe, la sonde sera pratiquement en apparence dĂŠfinitive. On pourra la placer sur son bouclier et continuer l’intĂŠgration des autres ĂŠlĂŠments, rĂŠaliser les lignes ĂŠlectriques non encore disponibles. Ce n’est que tout Ă la fin, JEKERT ĂŠtant entièrement terminĂŠe, que l’on aura peut ĂŞtre Ă redĂŠmonter le bouclier pour modifier le cordon ombilical. Comme il n’y aura que les quatre ĂŠcrous infĂŠrieurs Ă dĂŠposer, ce sera facile.
Les options possibles.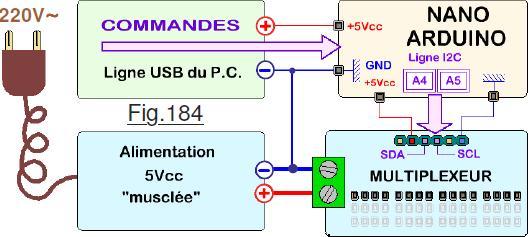
Comme l’affirme un dicton chinois, ÂŤÂ C’est très difficile de prĂŠdire l’avenir, surtout quand c’est pour plus tard !  Aussi, bien que seule la faisabilitĂŠ a ĂŠtĂŠ vĂŠrifiĂŠe, il est prĂŠvu sĂŠrieusement de complĂŠter cette saga par un TOME 5 dans lequel il sera question de rĂŠaliser un pupitre de commande qui se substituera au P.C. et rendra ainsi la sonde totalement autonome. Si on ouvre ici une parenthèse, c’est pour justifier le terme PROVISOIREMENT employĂŠ dans le chapitre prĂŠcĂŠdent. Ainsi vous aurez une vue plus gĂŠnĂŠrale du projet futur et saurez pourquoi le cordon ombilical que nous allons brancher lors de ces manipulations n’est peut ĂŞtre pas le dĂŠfinitif et qu’il 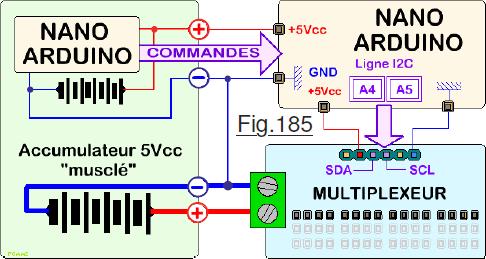 faudra dĂŠposer le bouclier pour le modifier. La Fig.184 prĂŠsente la configuration que vous aurez tous utilisĂŠe pour conduire toutes les ĂŠtudes et faire les expĂŠrimentations. Dans cet arrangement, c’est une alimentation secteur 220V~ qui alimente en puissance le multiplexeur. Le calculateur Arduino est alimentĂŠ Ă part par la ligne USB du Moniteur sĂŠrie de l’IDE qui lui transmet les COMMANDES de pilotage.
faudra dĂŠposer le bouclier pour le modifier. La Fig.184 prĂŠsente la configuration que vous aurez tous utilisĂŠe pour conduire toutes les ĂŠtudes et faire les expĂŠrimentations. Dans cet arrangement, c’est une alimentation secteur 220V~ qui alimente en puissance le multiplexeur. Le calculateur Arduino est alimentĂŠ Ă part par la ligne USB du Moniteur sĂŠrie de l’IDE qui lui transmet les COMMANDES de pilotage.
Particulièrement sĂŠduisante, la solution de la Fig.185 consiste Ă incorporer dans le petit pupitre de pilotage autonome deux sources d’ĂŠnergies. Un petit accumulateur 9Vcc ou 5Vcc qui alimente la carte Arduino animant JEKERT, et la carte Arduino assurant la gestion du pupitre. Un gros accumulateur 5Vcc se charge de fournir les courants importants consommĂŠs en transitoire dans les servomoteurs. Bien qu’idĂŠale ce ne sera pas celle retenue dans ce didacticiel.
Finalement, c’est la solution de la Fig.186 qui a ĂŠtĂŠ retenue. Elle sera justifiĂŠe dans le TOME 6, mais n’interdit absolument pas que vous puissiez opter pour une solution locale entièrement autonome. En effet, si vous analysez les dessins, que ce soit pour la configuration de la Fig.185 ou celle de la Fig.186 dans les deux cas la sonde ne ÂŤÂ voit pas la diffĂŠrence . C’est cotĂŠ raquette de pilotage que les branchements sont diffĂŠrents. Dans les deux cas on devra rĂŠaliser un cordon ombilical avec deux fils de puissance, deux lignes plus petites pour l’alimentation de la carte Arduino, et des fils pouvant adopter des sections très faibles pour le bus de COMMANDE. Dans le cas d’un pilotage avec l’IDE on se contentera de ce que l’on va faire dans ce chapitre, c’est Ă dire 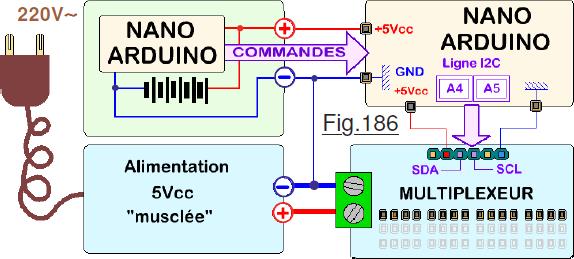 de ne rĂŠaliser que le cordon ombilical de puissance. Si un jour vous franchissez le pas pour un pilotage autonome, il suffira de dĂŠposer le bouclier et de complĂŠter le cordon ombilical avant de le rĂŠinstaller sur JEKERT.
de ne rĂŠaliser que le cordon ombilical de puissance. Si un jour vous franchissez le pas pour un pilotage autonome, il suffira de dĂŠposer le bouclier et de complĂŠter le cordon ombilical avant de le rĂŠinstaller sur JEKERT.
PrĂŠparer un cordon ombilical provisoire.
PrĂŠalable Ă l’assemblage du bouclier, il faut disposer de la ligne ĂŠlectrique qui assurera l’alimentation ĂŠlectrique des servomoteurs, car elle conditionne la mise en place du bouclier. En effet, elle est coincĂŠe entre ce dernier et le circuit imprimĂŠ principal. Un petit retour sur la Fig.173 remĂŠmore la toute première approche qui consistait pour alimenter les moteurs Ă souder deux gros fils sous le circuit imprimĂŠ du condensateur de 470ÂľF. Puis estimĂŠs trop rigides, les deux fils 2 et 4 ont ĂŠtĂŠ oubliĂŠs. La ligne de puissance se branche actuellement sur le connecteur HE14 situĂŠ sur le dessus du petit circuit imprimĂŠ. Pour minimiser les rĂŠsistances ĂŠlectriques des contacts entre les broches, sur le circuit imprimĂŠ on place en M de la Fig187 un  connecteur HE14 mâle Ă huit picots. En effet, une règle ĂŠlĂŠmentaire de sĂŠcuritĂŠ fondamentale consiste Ă toujours placer en ÂŤÂ sortie d’une ligne ĂŠlectrique quelconque  des prises femelles pour ĂŠviter des contacts accidentels. Le cordon ombilical de puissance sera donc branchĂŠ sur le dessus Ă l’aide d’une petite fiche HE14 femelle F. Quatre picots sont soudĂŠs sur le +5Vcc dont le fil est violet sur le prototype. Quatre autres lyres sont soudĂŠes sur GND dont l’isolant du fil est noir.
connecteur HE14 mâle Ă huit picots. En effet, une règle ĂŠlĂŠmentaire de sĂŠcuritĂŠ fondamentale consiste Ă toujours placer en ÂŤÂ sortie d’une ligne ĂŠlectrique quelconque  des prises femelles pour ĂŠviter des contacts accidentels. Le cordon ombilical de puissance sera donc branchĂŠ sur le dessus Ă l’aide d’une petite fiche HE14 femelle F. Quatre picots sont soudĂŠs sur le +5Vcc dont le fil est violet sur le prototype. Quatre autres lyres sont soudĂŠes sur GND dont l’isolant du fil est noir.
L’environnement de dĂŠveloppement n’est pas forcĂŠment très lumineux. En particulier quand la nuit est tombĂŠe, (La pauvre, passer sa vie Ă tomber, c’est un coup Ă se faire mal ça !) et que seule la lampe du bureau de l’ordinateur ĂŠclaire le clavier. La sonde est alors dans une zone de pĂŠnombre. Hors durant les procĂŠdures de tests, on branche, on dĂŠbranche, on mesure des tensions. Bref, il faut y voir un minimum. L’Image 33.JPG montre une petite baladeuse ĂŠlectrique improvisĂŠe qui fait partie intĂŠgrante du matĂŠriel expĂŠrimental du laboratoire Arduino. Pour pouvoir la brancher facilement sur la sonde, comme sur le dessus de cette dernière on dispose de place, la petite prise F a ĂŠtĂŠ complĂŠtĂŠe en soudant en gigogne une deuxième couche femelle picot Ă picot. L’Image 34.JPG prĂŠsente en gros plan la fiche double gigogne qui amène l’ĂŠnergie sur les servomoteurs. Notez que sur Image 35.JPG la ligne part directement sur le cotĂŠ de la sonde. Les picots soudĂŠs sont ÂŤÂ barbouillĂŠs  en rouge d’un cotĂŠ et en vert de l’autre pour ĂŠviter une inversion accidentelle de branchement lors des nombreuses manipulations de mise au point de la petite machine.
Mise en place du bouclier de protection.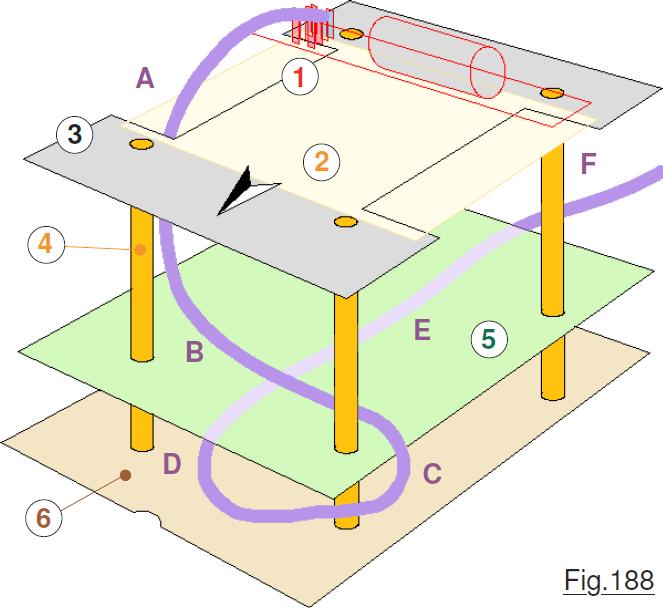
Phase ultime de concrĂŠtisation de la structure rĂŠsistante de JEKERT, on a branchĂŠ la ligne d’alimentation. Peu importe ce qui sera branchĂŠ Ă son autre extrĂŠmitĂŠ. Sa longueur sur le prototype est d’environ deux mètres ce qui me semble amplement suffisant. Quand elle sera totalement terminĂŠe, qu’il n’y aura plus rien Ă jouter tant au point de vue matĂŠriel que logiciel, on va s’amuser un peu. Puis la prĂŠcieuse mĂŠcanique sera rangĂŠe confortablement dans sa boite Ă chaussures et oubliĂŠe jusqu’Ă la visite d’amis qui dĂŠsireront la voir se trĂŠmousser. Elle franchira probablement jamais de longues distances. Aussi, tout au moins pour l’usage que j’en fais, deux mètres sont plus que suffisants. ConsidĂŠrons sur le croquis de la Fig.188 le cheminement de cette ligne ĂŠlectrique reprĂŠsentĂŠe en violet. La structure globale est reprĂŠsentĂŠe en 3 pour le châssis, avec les vis longues 4 qui solidarisent le circuit imprimĂŠ principal 5 et le bouclier 6. Sortant sur le cotĂŠ du connecteur 1, la ligne longe en A le flanc tribord de la sonde. (Observez la Fig.190 sur laquelle le faisceau en zone A est bien visibles en 5 et 6 descendant et partant vers l’intĂŠrieur) Puis de l’intĂŠrieur il passe vers bâbord en B pour ressortir en C et passer vers l’avant en restant au-dessus du bouclier 6. La photographie de l’Image 36.JPG montre la ligne ombilicale complète sortant sur bâbord avant d’ĂŞtre pliĂŠe vers le dessous pour passer vers l’avant au dessus du bouclier. CourbĂŠe alors vers l’arrière en D elle passe en E entre le bouclier 6 et le circuit imprimĂŠ principal 5. Puis, coincĂŠe entre les deux elle ressort vers l’arrière en F pour aller se poser au sol par souplesse. Mis Ă part le fait que sur la photographie le cordon ombilical est complet, la Fig.189 montre JEKERT en position pour recevoir le bouclier. Les divers fils qui constituent le cordon ombilical sont torsadĂŠs en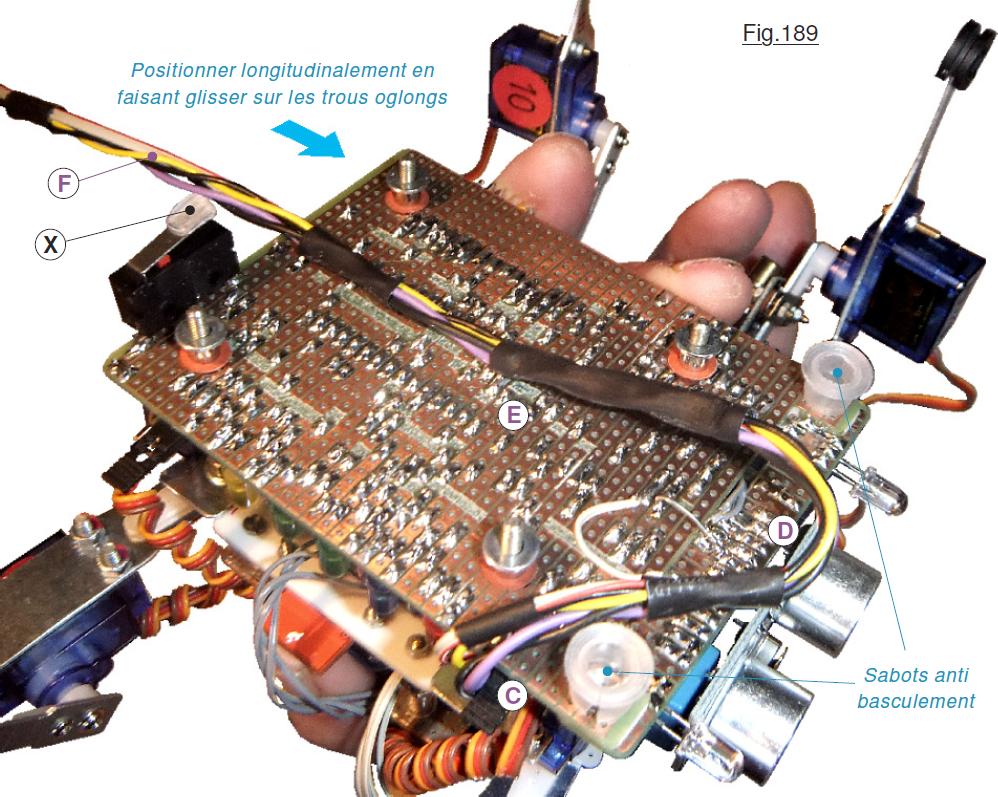 torons pour renforcer leur tenue mĂŠcanique et compactĂŠs tout le long par des bagues de gaine thermo-rĂŠtractables rĂŠgulièrement rĂŠparties tous les 9 cm environ. Mettre en place le bouclier, les rondelles mĂŠtalliques d’appui et serrer modĂŠrĂŠment les ĂŠcrous. Si le cordon ombilical est dĂŠfinitif, munir les ĂŠcrous des sabots avant leur mise en place. Sur la Fig.189 en X se trouve une petite butĂŠe autocollante en caoutchouc synthĂŠtique. Elle a ĂŠtĂŠ remplacĂŠe par la petite bague en caoutchouc de la Fig.161 car elle se dĂŠcollait et ne restait pas Ă demeure. Notez au passage que l’assemblage du bouclier n’est pas spĂŠcialement compliquĂŠ. On ne peut pas poser la petite mĂŠcanique qui reste constamment dans notre main. Seule l’autre est disponible. Aussi, pour mener Ă bien cette opĂŠration il importe de bien prĂŠparer tous les outils dont on aura besoin Ă l’avance. Par ailleurs, le cordon ombilical de deux mètres ne demande qu’Ă compliquer les choses. Aussi il convient, avant de commencer la manipulation, de l’enrouler et le maintenir dans une boucle avec du petit fil rigide.
torons pour renforcer leur tenue mĂŠcanique et compactĂŠs tout le long par des bagues de gaine thermo-rĂŠtractables rĂŠgulièrement rĂŠparties tous les 9 cm environ. Mettre en place le bouclier, les rondelles mĂŠtalliques d’appui et serrer modĂŠrĂŠment les ĂŠcrous. Si le cordon ombilical est dĂŠfinitif, munir les ĂŠcrous des sabots avant leur mise en place. Sur la Fig.189 en X se trouve une petite butĂŠe autocollante en caoutchouc synthĂŠtique. Elle a ĂŠtĂŠ remplacĂŠe par la petite bague en caoutchouc de la Fig.161 car elle se dĂŠcollait et ne restait pas Ă demeure. Notez au passage que l’assemblage du bouclier n’est pas spĂŠcialement compliquĂŠ. On ne peut pas poser la petite mĂŠcanique qui reste constamment dans notre main. Seule l’autre est disponible. Aussi, pour mener Ă bien cette opĂŠration il importe de bien prĂŠparer tous les outils dont on aura besoin Ă l’avance. Par ailleurs, le cordon ombilical de deux mètres ne demande qu’Ă compliquer les choses. Aussi il convient, avant de commencer la manipulation, de l’enrouler et le maintenir dans une boucle avec du petit fil rigide.
Un petit rĂŠsumĂŠ de la connectique sur tribord.
Maintenant que l’on peut poser JEKERT sur son bouclier et que la structure principale est en place, nous allons complĂŠter la machine en assemblant les divers modules scientifiques. Avant de continuer la description, il me semble utile de vous prĂŠsenter le flanc tribord de la machine avec tous les connecteurs en place, histoire de faire un petit rĂŠsumĂŠ d’anticipation.
La Fig.190 est une photographie rĂŠalisĂŠe avec la sonde en version ultime, c’est Ă dire celle qui se pilote avec une raquette de commande. Sur cette vue les sabots anti-basculement 11 sont en place, mais pas encore ceux du bouclier. Le bouton de RESET est parfaitement visible. Le connecteur initialement prĂŠvu pour brancher un potentiomètre supporte maintenant en 8 un petit adaptateur pourvu d’une LED rouge. (Les explications le concernant ainsi que son utilitĂŠ seront abordĂŠes dans le TOME 5 si l’avenir lui permet de voir le jour.) Ce qui frappe le plus quand on regarde cette image, c’est la compacitĂŠ matĂŠrielle. On peut affirmer qu’il n’y a pas beaucoup de place perdue Ă l’intĂŠrieur de la structure. Si une mouche veut traverser, il vaut mieux qu’elle se munisse d’un GPS ! En 1 se trouve le gros fil GND actuellement inutilisĂŠ et repliĂŠ vers l’intĂŠrieur. Partant du dessous, on voit monter en 2 la ligne Ă quatre couleurs qui se branche sur le multiplexeur. Le paquet de fils qui sort en 3 est en rĂŠalitĂŠ la continuitĂŠ de 12. Cette ligne part du petit connecteur HE14 Ă six broches qui vĂŠhicule la ligne I2C vers la boussole et vers la centrale gyroscopique. Le gros barreau 4 n’est pas autre chose que le +5Vcc du ÂŤÂ circuit 470ÂľF  qui se branche sur le connecteur HE14 Ă quatre picots en 10. Sur votre exemplaire, c’est un tout petit fil
 comme ceux de 3 par exemple. En 5 et 6, torsadĂŠs intimement, transitent les deux fils de section moyenne constituant le cordon ombilical de puissance 5Vcc. La petite ligne torsadĂŠe 7 vient de la cellule photorĂŠsistante du luxmètre colorimĂŠtrique. En 9 est branchĂŠe la ligne filaire, ĂŠgalement bien torsadĂŠe, qui alimente le LASER. Notez que pour diminuer le risque d’inversion lors des nombreux essais, les deux fils sont colorĂŠs pour en repĂŠrer la polaritĂŠ. Le cordon ombilical qui relie la carte Arduino de la sonde Ă celle de la raquette de commande est branchĂŠ sur le connecteur situĂŠ en bas Ă droite. Initialement six fils ĂŠtaient prĂŠvus. Dans la version dĂŠfinitive seuls quatre sont utilisĂŠs, les deux picots @ restant non soudĂŠs. En 13 nous avons la ligne de dialogue croisĂŠe TX / RX dont la fonction sera dĂŠtaillĂŠe dans le TOME 5. Le fil jaune en 14 est soudĂŠ sur le picot le plus Ă droite sur le connecteur. Il amène le +5Vcc au calculateur de bord. En 15 c’est GND qui est soudĂŠ sur le premier picot. Ces deux fils constituent la ligne ĂŠnergĂŠtique pour l’Arduino NANO de JEKERT. Vu que le courant total peut aller jusqu’Ă 90 mA, (Voir la fiche signalĂŠtique au dĂŠbut du TOME 3.) on utilise deux fils de section plus importantes que ceux des minuscules lignes ne vĂŠhiculant que des signaux binaires.
comme ceux de 3 par exemple. En 5 et 6, torsadĂŠs intimement, transitent les deux fils de section moyenne constituant le cordon ombilical de puissance 5Vcc. La petite ligne torsadĂŠe 7 vient de la cellule photorĂŠsistante du luxmètre colorimĂŠtrique. En 9 est branchĂŠe la ligne filaire, ĂŠgalement bien torsadĂŠe, qui alimente le LASER. Notez que pour diminuer le risque d’inversion lors des nombreux essais, les deux fils sont colorĂŠs pour en repĂŠrer la polaritĂŠ. Le cordon ombilical qui relie la carte Arduino de la sonde Ă celle de la raquette de commande est branchĂŠ sur le connecteur situĂŠ en bas Ă droite. Initialement six fils ĂŠtaient prĂŠvus. Dans la version dĂŠfinitive seuls quatre sont utilisĂŠs, les deux picots @ restant non soudĂŠs. En 13 nous avons la ligne de dialogue croisĂŠe TX / RX dont la fonction sera dĂŠtaillĂŠe dans le TOME 5. Le fil jaune en 14 est soudĂŠ sur le picot le plus Ă droite sur le connecteur. Il amène le +5Vcc au calculateur de bord. En 15 c’est GND qui est soudĂŠ sur le premier picot. Ces deux fils constituent la ligne ĂŠnergĂŠtique pour l’Arduino NANO de JEKERT. Vu que le courant total peut aller jusqu’Ă 90 mA, (Voir la fiche signalĂŠtique au dĂŠbut du TOME 3.) on utilise deux fils de section plus importantes que ceux des minuscules lignes ne vĂŠhiculant que des signaux binaires.
Souder les petits fils sur les non moins petits connecteurs HE14.
OpĂŠration d’une banalitĂŠ Ă pleurer pour un ĂŠlectronicien averti, arriver Ă souder ces minuscules conducteurs sur les broches des connecteurs HE14 sans faire de court circuit intempestif avec la broche voisine peut tourner au cauchemar pour la roboticienne ou le roboticien occasionnel si l’on ne s’y prend pas correctement. Par correctement, il faut interprĂŠter comme ÂŤÂ Se faciliter la mission en prĂŠparent bien son travail . Pour que cette manipulation ressemble Ă de la routine, deux conditions seront rĂŠunies en prĂŠalable : Le petit connecteur HE14 qu’il soit mâle ou femelle sera bien tenu dans l’espace et ne bougera pas quand on va appliquer le fil de soudure. (Inutile de vous prĂŠciser que le fer Ă souder est bien adaptĂŠ Ă ce travail d’orfèvre. C’est un petit modèle avec une pointe fine. Le rouleau de soudure est de première qualitĂŠ et de petite section.) Sur Image 37.JPG il s’agit d’une simple pince Ă auto serrage. Comme elle n’est pas assez stable, ce que ne montre pas la photographie, c’est que par dessus est posĂŠ une autre grosse pince plus massive pour faire poids. La deuxième condition rĂŠside dans la facilitĂŠ Ă enrouler les tout petit fils ĂŠlectriques autour des broches du connecteur. Cette phase est particulièrement indigeste quand on tente directement l’opĂŠration sur le connecteur. Elle devient totalement aisĂŠe qui on commence, comme montrĂŠ sur Image 37.JPG, Ă donner au conducteur en cuivre la forme d’une queue de cochon s’enroulant exactement sur la broche du connecteur HE14. Pour rĂŠaliser cette prĂŠparation, on a rĂŠcupĂŠrĂŠ la lyre d’un connecteur dont les broches sont longues et l’on s’en sert de gabarit.
La suite est ici.