Avec les soixante premières expériences nous avons couvert le chapitre des périphériques de visualisation et celui relatif aux claviers, boutons poussoir, codeur rotatifs et commandes analogiques du type joystick. Il est grand temps de « tourner la page » et d’emprunter une piste incontournable : Les motorisations. Qui dit robotique induit machines « qui bougent », donc animées par des générateurs de mouvements. Aussi, une bonne majorité de réalisations ludiques vont inclure des moteurs et des moteurs-réducteurs qui peuvent être classée en :
Étant les premiers cités dans la liste de la Fig.129 il est assez naturel de commencer par ces modèles. Pour comprendre finement les exercices relatifs à la motorisation, il importe d’avoir un minimum d’informations sur l’électromagnétisme, la constitution des relais ainsi que les caractéristiques spécifiques aux moteurs électriques. Toutes ces informations sont disponibles dans un <FASCICULEs> nommé Électromagnétisme.pdf accompagnant ce didacticiel. L’un des exemples qui utilise plusieurs de ces moteurs-réducteurs est disponible dans le « gros projet » dont voici le lien : https://www.robot-maker.com/ouvrages/machine-de-turing-tome1-presentation/
Experience_061 : Pilotage direct d’un petit moteur à courant continu.
 Cette manipulation est élémentaire puisque Experience_061.ino est un automatisme aveugle qui se contente de faire tourner un petit moteur à coutant continu durant une seconde, puis à ne plus l’alimenter durant une seconde. L’exemplaire utilisé est vraiment tout petit et consomme 10mA à vide sous 5Vcc à ses bornes. Quand il est alimenté, si on le stoppe manuellement, il n’y a plus les contre courants induits, et l’intensité monte à 100mA. C’est le pic d’intensité qu’il présente au démarrage. Aussi il n’est pas question de soumettre la sortie binaire D2 à un tel courant transitoire. Le schéma électrique utilisé est celui de la Fig.130 dans lequel on ajoute en série la résistance R de 100Ω. L’intensité la plus importante que devra fournir Arduino est alors de 50mA. Cette surcharge n’est acceptable que si elle se produit uniquement au démarrage. Bloquer le rotor à la main par exemple serait préjudiciable. Il est clair qu’ainsi « muselé » notre petit moteur n’est pas très nerveux. Comme expliqué dans le document Électromagnétisme.pdf on constate facilement qu’au passage à l’état « 0 » de D2 il continue à tourner de presque un tour. On retrouve en D la diode de roue-libre qui court-circuite les tensions inverses de rupture.
Cette manipulation est élémentaire puisque Experience_061.ino est un automatisme aveugle qui se contente de faire tourner un petit moteur à coutant continu durant une seconde, puis à ne plus l’alimenter durant une seconde. L’exemplaire utilisé est vraiment tout petit et consomme 10mA à vide sous 5Vcc à ses bornes. Quand il est alimenté, si on le stoppe manuellement, il n’y a plus les contre courants induits, et l’intensité monte à 100mA. C’est le pic d’intensité qu’il présente au démarrage. Aussi il n’est pas question de soumettre la sortie binaire D2 à un tel courant transitoire. Le schéma électrique utilisé est celui de la Fig.130 dans lequel on ajoute en série la résistance R de 100Ω. L’intensité la plus importante que devra fournir Arduino est alors de 50mA. Cette surcharge n’est acceptable que si elle se produit uniquement au démarrage. Bloquer le rotor à la main par exemple serait préjudiciable. Il est clair qu’ainsi « muselé » notre petit moteur n’est pas très nerveux. Comme expliqué dans le document Électromagnétisme.pdf on constate facilement qu’au passage à l’état « 0 » de D2 il continue à tourner de presque un tour. On retrouve en D la diode de roue-libre qui court-circuite les tensions inverses de rupture.
Experience_062 : Pilotage par relais d’un petit moteur à courant continu.
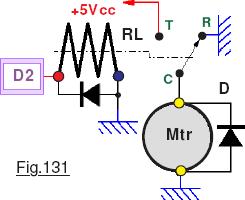 Bien que l’on reprend exactement la même structure que celle de l’expérience précédente, on suppose ici que lorsque l’on coupe l’alimentation du moteur il doit s’immobiliser immédiatement. On va donc ajouter un relais électromagnétique pour utiliser les contre-courants comme explicité en page 3 du fascicule Électromagnétisme.pdf. Le schéma devient celui de la Fig.131 dans lequel le relais RL sert à alimenter le moteur ou à le placer en court-circuit franc. Ici D2 n’a plus à fournir le courant d’appel, et R est supprimée conférant au moteur toute sa nervosité au démarrage. Le relais RL doit être prévu pour commuter sans problème l’intensité crête de 100mA ce qui ne pose pas de problème, un tout petit relais étant utilisé avec ce démonstrateur sa capacité reste bien plus élevée et son temps de commutation très court. Dans ce montage quand RL passe au travail, le +5Vcc alimente le moteur qui démarre rapidement. Quand D2 passe à l’état « 0 » le relais passe au repos et provoque un court-circuit franc sur le moteur qui immédiatement s’immobilise. Le temps pour l’élément mécanique du contact passant de T à R restant très court, la surtension de rupture n’en reste pas moins virulente et la diode de roue-libre D indispensable. Si le moteur est de petite puissance comme celui d’Image 021.JPG le +5Vcc peut être prélevé directement sur l’alimentation d’Arduino. S’il est plus puissant, il sera impératif d’employer une alimentation séparée.
Bien que l’on reprend exactement la même structure que celle de l’expérience précédente, on suppose ici que lorsque l’on coupe l’alimentation du moteur il doit s’immobiliser immédiatement. On va donc ajouter un relais électromagnétique pour utiliser les contre-courants comme explicité en page 3 du fascicule Électromagnétisme.pdf. Le schéma devient celui de la Fig.131 dans lequel le relais RL sert à alimenter le moteur ou à le placer en court-circuit franc. Ici D2 n’a plus à fournir le courant d’appel, et R est supprimée conférant au moteur toute sa nervosité au démarrage. Le relais RL doit être prévu pour commuter sans problème l’intensité crête de 100mA ce qui ne pose pas de problème, un tout petit relais étant utilisé avec ce démonstrateur sa capacité reste bien plus élevée et son temps de commutation très court. Dans ce montage quand RL passe au travail, le +5Vcc alimente le moteur qui démarre rapidement. Quand D2 passe à l’état « 0 » le relais passe au repos et provoque un court-circuit franc sur le moteur qui immédiatement s’immobilise. Le temps pour l’élément mécanique du contact passant de T à R restant très court, la surtension de rupture n’en reste pas moins virulente et la diode de roue-libre D indispensable. Si le moteur est de petite puissance comme celui d’Image 021.JPG le +5Vcc peut être prélevé directement sur l’alimentation d’Arduino. S’il est plus puissant, il sera impératif d’employer une alimentation séparée.
Experience_063 : Pilotage avec inversion du sens de rotation.
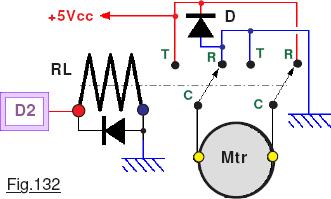 Exposé en bas de la page 2 du document Électromagnétisme.pdf on utilise un relais pour croiser les fils du moteur et ainsi avoir la maitrise de son sens de rotation. On pourrait envisager une commutation à base de transistors NPN ou PNP, la complexité réside dans le problème le la diode de roue libre qui doit intervenir pour les deux polarités. C’est pourquoi le schéma de la Fig.132 reste dans la simplicité en insérant un relais pour l’inversion du sens de rotation. Pour montrer la « nervosité » du changement de sens de rotation, le moteur est alimenté en permanence, on se contente d’inverser la polarité deux fois par seconde par l’entremise du relais RL piloté directement par la sortie binaire D2. Avec la valeur du paramètre Temporisation la rapidité de réaction du moteur est telle que si l’on ne fait pas une trace rouge par exemple bien visible sur la roue dentée du rotor, on a vraiment du mal à observer le changement de sens de rotation.
Exposé en bas de la page 2 du document Électromagnétisme.pdf on utilise un relais pour croiser les fils du moteur et ainsi avoir la maitrise de son sens de rotation. On pourrait envisager une commutation à base de transistors NPN ou PNP, la complexité réside dans le problème le la diode de roue libre qui doit intervenir pour les deux polarités. C’est pourquoi le schéma de la Fig.132 reste dans la simplicité en insérant un relais pour l’inversion du sens de rotation. Pour montrer la « nervosité » du changement de sens de rotation, le moteur est alimenté en permanence, on se contente d’inverser la polarité deux fois par seconde par l’entremise du relais RL piloté directement par la sortie binaire D2. Avec la valeur du paramètre Temporisation la rapidité de réaction du moteur est telle que si l’on ne fait pas une trace rouge par exemple bien visible sur la roue dentée du rotor, on a vraiment du mal à observer le changement de sens de rotation.
 Experience_064 : Inversion du sens de rotation et freinage.
Experience_064 : Inversion du sens de rotation et freinage.
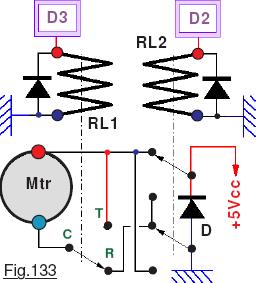
Avec ce démonstrateur on prépare le travail pour P064 car sur ce dernier il y aura deux micro-Switchs et le mouvement devra repartir dans l’autre sens ou stopper sans forcer sur ces derniers, c’est à dire très rapidement. Le schéma mis en œuvre est celui de la Fig.133 qui s’inspire directement de la Fig.8 du document Électromagnétisme.pdf donnée en page 3. Une petite explication sur le fonctionnement de ce circuit électrique me semble la bienvenue. Dans un premier temps, on va supposer que le relais de changement de sens RL2 est au travail comme sur le dessin, D2 fournissant un état « 1« . On suppose que D1 est à l’état « 0« . De ce fait RL1 n’est pas alimenté et se trouve au repos. Dans cette configuration le moteur est alimenté avec le positif sur la broche « du haut » et le négatif sur la broche « du bas ». Il tourne dans un sens influencé par cette configuration.
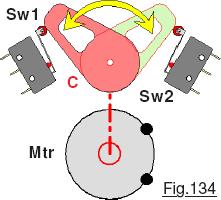 A ce stade, deux options se présentent pour le programmeur : Soit il désire stopper le moteur, soit il veut que le mécanisme reparte dans l’autre sens immédiatement. On va envisager ici en Fig.134 le fonctionnement alternatif automatique suivant : Sw1 étant actif, le moteur tourne et entraine la came C dans le sens horaire. Dès que Sw2 passe à l’état travail le sens de rotation est inversé et la came repart dans le sens antihoraire. Dès que Sw1 est activé le moteur est stoppé net avec les contre-courants. Puis, après une temporisation d’une seconde le cycle recommence. C’est un asservissement sans fin. Chaque fois que D2 change d’état on inverse le sens de polarisation de l’énergie sur le moteur Mtr. Par contre la diode de roue-libre D est toujours orientée dans le bon sens pour raboter les surtensions inverses de rupture. Si D3 passe au travail, l’arrivée de l’énergie en R est immédiatement interrompue et la liaison entre C et T stoppe immédiatement le moteur par l’effet des contre-courants.
A ce stade, deux options se présentent pour le programmeur : Soit il désire stopper le moteur, soit il veut que le mécanisme reparte dans l’autre sens immédiatement. On va envisager ici en Fig.134 le fonctionnement alternatif automatique suivant : Sw1 étant actif, le moteur tourne et entraine la came C dans le sens horaire. Dès que Sw2 passe à l’état travail le sens de rotation est inversé et la came repart dans le sens antihoraire. Dès que Sw1 est activé le moteur est stoppé net avec les contre-courants. Puis, après une temporisation d’une seconde le cycle recommence. C’est un asservissement sans fin. Chaque fois que D2 change d’état on inverse le sens de polarisation de l’énergie sur le moteur Mtr. Par contre la diode de roue-libre D est toujours orientée dans le bon sens pour raboter les surtensions inverses de rupture. Si D3 passe au travail, l’arrivée de l’énergie en R est immédiatement interrompue et la liaison entre C et T stoppe immédiatement le moteur par l’effet des contre-courants.
Experience_065 : Inversion du sens capté par Micro-Switch.
Pour ce démonstrateur on suppose une application de petite robotique « sérieuse » et l’on va faire usage du moteur du bas de la page 3 de Électromagnétisme.pdf. La première conséquence, c’est que ce type de motorisation fournit sur l’arbre de sortie un couple très important. Si le programme ne se comporte pas comme prévu, la came C va forcer exagérément sur le micro-Switch et l’endommager. L’approche pour réaliser cette expérience sera donc prudente :
 • On réalise le schéma de la Fig.133 mis à part que l’énergie pour le moteur est issue d’une alimentation séparée fournissant du 12Vcc régulé. Pour simplifier, personnellement j’ai alimenté directement en +5Vcc comme sur le schéma. (Le moteur n’est pas nerveux, en contre partie la perturbation qu’il engendre est négligeable et ne provoque aucun incident. J’ai donc tenté la facilité.)
• On réalise le schéma de la Fig.133 mis à part que l’énergie pour le moteur est issue d’une alimentation séparée fournissant du 12Vcc régulé. Pour simplifier, personnellement j’ai alimenté directement en +5Vcc comme sur le schéma. (Le moteur n’est pas nerveux, en contre partie la perturbation qu’il engendre est négligeable et ne provoque aucun incident. J’ai donc tenté la facilité.)
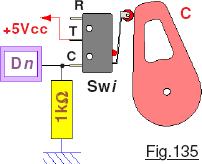
• On réalise la petite platine expérimentale avec les deux micro-Switch réunis aux entrée binaire D8 et D9 sans oublier les résistances de 1kΩ branchées comme précisé sur la Fig.135 qui maintiennent un état « 0« . Le moteur est branché électriquement mais la came n’est pas placée sur le rotor. Il va ainsi fonctionner à vide sans risquer d’excorier les micro contacteurs. Noter que placer une résistance de faible valeur entre Di et GND procure une bien meilleure immunité aux parasites que de faire appel à la résistance interne de PULL-UP du microcontrôleur ATmega328.
 • On téléverse Experience_065.ino et on manipule à la main les deux micro contacteurs pour vérifier le sens correct de rotation du moteur et le comportement attendu avec D8 et D9.
• On téléverse Experience_065.ino et on manipule à la main les deux micro contacteurs pour vérifier le sens correct de rotation du moteur et le comportement attendu avec D8 et D9.
• On installe alors la came C sur l’arbre moteur comme
montré sur la Fig.136 et on alimente l’ensemble.
On se doute que pour mener cette expérience il faut immobiliser le moteur ainsi que les deux micro-Switch sur une plaque support commune qui pour ma part est en polystyrène choc. Cette plaque est une chute. La came en violet est également issue de récupération. C’est un élément non utilisé sur la machine de Turing citée en page 52 qui n’a pas été validé lors du développement. Lorsque l’ensemble fonctionne parfaitement, il est alors possible de passer en +12Vcc. Le moteur trouve alors toute sa nervosité et le cycle devient très rapide pour peu que l’amplitude angulaire soit faible.
La suite est ici.


