Nous nous doutons qu’une sortie binaire d’une carte Arduino est totalement incapable de commuter des courants de plusieurs ampères. Il faut insérer un amplificateur de commutation constitué généralement d’un transistor de puissance travaillant en régime Saturé / Bloqué.
Le mode « Saruré / Bloqué ».
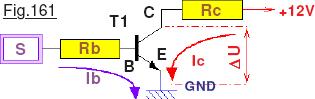 Incontournable lorsque l’on désire réaliser une interface de commutation, le transistor utilisé en mode « Saturé/Bloqué » s’impose naturellement. Considérons sur la Fig.161 le transistor T1 de type NPN. Quand la sortie S du microcontrôleur est à « 0« , le courant Ib est nul et T1 est alors non conducteur. On précise ce fait par le vocable Bloqué. Le courant Ic est nul et sur le collecteur C on retrouve les +12V. Lorsque S passe à l’état « 1 » la broche de l’ATmega328 se trouve à +5V. Le courant de base Ib est alors directement fonction de la résistance de limitation Rb. Le courant collecteur Ic est alors β fois le courant Ib. Par définition, β représente le gain en courant du transistor utilisé. Par exemple, si Ib=2mA et que β =20, Ic sera égal à 2 x 20 = 40mA. Toutefois, le courant collecteur est limité par la résistance de charge Rc. Supposons que Rc = 400Ω. Le plus grand courant qui pourrait la traverser en supposant un court-circuit entre GND et C serait de 12/400=0,03 soit 30mA. Hors le courant de base est plus important que les 1,5mA qui suffiraient à provoquer ce courant. On dit alors que le transistor est Saturé. La chute de potentiel ΔU entre collecteur C et GND est faible et de l’ordre de 0,9V.
Incontournable lorsque l’on désire réaliser une interface de commutation, le transistor utilisé en mode « Saturé/Bloqué » s’impose naturellement. Considérons sur la Fig.161 le transistor T1 de type NPN. Quand la sortie S du microcontrôleur est à « 0« , le courant Ib est nul et T1 est alors non conducteur. On précise ce fait par le vocable Bloqué. Le courant Ic est nul et sur le collecteur C on retrouve les +12V. Lorsque S passe à l’état « 1 » la broche de l’ATmega328 se trouve à +5V. Le courant de base Ib est alors directement fonction de la résistance de limitation Rb. Le courant collecteur Ic est alors β fois le courant Ib. Par définition, β représente le gain en courant du transistor utilisé. Par exemple, si Ib=2mA et que β =20, Ic sera égal à 2 x 20 = 40mA. Toutefois, le courant collecteur est limité par la résistance de charge Rc. Supposons que Rc = 400Ω. Le plus grand courant qui pourrait la traverser en supposant un court-circuit entre GND et C serait de 12/400=0,03 soit 30mA. Hors le courant de base est plus important que les 1,5mA qui suffiraient à provoquer ce courant. On dit alors que le transistor est Saturé. La chute de potentiel ΔU entre collecteur C et GND est faible et de l’ordre de 0,9V.
La structure Darlington.
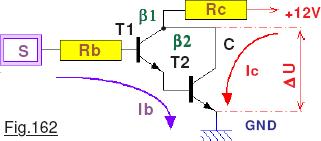 C’est la solution idéale lorsque l’on désire commuter des courants importants avec des signaux de commande dérisoires. Les transistors qui peuvent commuter des courants de plusieurs ampères en mode « Saturé/Bloqué » présentent des gains en courant β généralement très modérés. De l’ordre de 20 à 30, rarement plus. La structure Darlington consiste à chaîner deux transistors de même type comme décrit sur la Fig.162 le gain en courant global étant alors égal à β1 x β2. On arrive alors très facilement à un gain en courant global très important. Du coup, avec quelques mA dans Ib on peut commuter des intensités de plusieurs ampères. L’inconvénient de ce montage, c’est que l’on double la chute de potentiel ΔU entre collecteur C et GND qui alors devient de l’ordre de 1,9V. Seul le transistor T2 doit être de puissance, pour T1 n’importe quel composant pour petit signal conviendra. Si la tension à commuter est négative, il suffit dans ce schéma de remplacer les transistors NPN par des éléments de types PNP.
C’est la solution idéale lorsque l’on désire commuter des courants importants avec des signaux de commande dérisoires. Les transistors qui peuvent commuter des courants de plusieurs ampères en mode « Saturé/Bloqué » présentent des gains en courant β généralement très modérés. De l’ordre de 20 à 30, rarement plus. La structure Darlington consiste à chaîner deux transistors de même type comme décrit sur la Fig.162 le gain en courant global étant alors égal à β1 x β2. On arrive alors très facilement à un gain en courant global très important. Du coup, avec quelques mA dans Ib on peut commuter des intensités de plusieurs ampères. L’inconvénient de ce montage, c’est que l’on double la chute de potentiel ΔU entre collecteur C et GND qui alors devient de l’ordre de 1,9V. Seul le transistor T2 doit être de puissance, pour T1 n’importe quel composant pour petit signal conviendra. Si la tension à commuter est négative, il suffit dans ce schéma de remplacer les transistors NPN par des éléments de types PNP.
Experience_082 : Tolérance auditive.
Nous avons vu dans le paragraphe précédent que la période théorique du son émis par un diapason est de 2272.7µS. On se doute qu’un diapason matériel comme celui de la Fig.159 qui fait référence depuis des siècles n’a pas cette précision. C’est l’avantage des émulateurs électroniques. Celui réalisé avec Arduino doit avoir une erreur de période meilleure que 0,3µS puisque la Fig.160 confirme une valeur mesurée de 2273µS. Hors nous savons qu’un appareil numérique affiche toujours à ±1. La question qui se pose est la suivante :
– À partir de quelle imprécision notre oreille va faire la différence ?
Pour ma part, je constate qu’à -2Hz je ne discerne pas encore la dégradation. Par contre, à +1Hz je détecte facilement l’écart de tonalité.
Experience_083 : Encore le coup de la tolérance auditive.
À partir du moment où l’on désire générer des tonalités qui soient des notes de musique puisées dans la gamme tempérée, il nous faut impérativement connaitre la fréquence des signaux à générer en fonction de la note désirée et de son octave. Dans la pratique, à partir du moment où l’on a défini une note de base, par exemple le LA d’indice 3 qui est à une fréquence de 440Hz, toutes les autres notes en amont ou en aval s’en déduisent par un simple calcul. Pas question ici de vous égarer dans des calculs utilisant des puissances et des racines douzièmes … pour frimer. Il suffit de savoir que toutes les notes sont en progression géométriques. Du coup on peut les calculer et les consigner dans un tableau. C’est exactement ce qui est fait dans la Fiche n°53. Ce tableau n’est que le fruit d’un savant calcul, mais il ne faut surtout pas s’imaginer que l’accord des instruments de musique doivent être ajusté au centième de Hertz. Pour s’en rendre compte, je vous propose avec Experience_083.ino une manipulation strictement analogue à la précédente en prenant comme référence le DO indice 7 dont la fréquence calculée est de 2186.01Hz. Pour ma part la fréquence générée peut varier entre les limites de 2177Hz à 2191Hz sans que l’impression de tonalité soit différente, soit une dégradation de -9Hz à +5Hz. Alors le centième de Hz on oublie somptueusement.
Experience_084 : Notre première gamme chromatique indice cinq.
L’avantage avec Experience_084.ino c’est qu’il n’y a strictement rien à changer au matériel. On se contente de téléverser le croquis et on écoute « la musique ». J’ai opté pour l’octave 5 car elle fournit une gamme de fréquences relativement graves. Bien entendu, rien ne vous interdit de consulter la Fiche n°53 et de choisir l’indice de votre choix. Naturellement pour pouvoir utiliser l’instruction tone() on doit arrondir les valeurs calculées au Hertz près.
Experience_085 : Un saut d’octave en octave.
Autre particularité de la gamme tempérée, quand on prend une note, pour obtenir la même un octave moins haut ou plus haut il suffi de diviser sa fréquence ou de la multiplier par deux. On retrouve la progression géométrique annoncée dans l’expérience précédente. C’est particulièrement facile à vérifier pour le LA où les décimales sont nulles. (Ligne jaune dans le tableau de la Fiche n°53.) Comme pour la manipulation précédente il n’y a rien à modifier au matériel, juste téléverser Experience_085.ino qui balaye quatre octaves de la lettre LA. En dessous de 220Hz et au dessus de 1760Hz les harmoniques des signaux carrés faussent l’impression auditive.

Experience_086 : Une petite boite musicale.
![]() Avoir abordé toutes ces caractéristiques physiques sur les notes de musique et ne pas terminer par une petite mélodie serait coupable. Aussi, pour montrer la richesse que peut procurer un petit bruiteur passif, nous allons terminer sur une petite boite à musique. Il suffit de rechercher dans la Fiche n°53 les fréquences correspondant aux notes, de les temporiser et de les séparer par des courts silences. Dans Experience_086.ino je ne fais que commencer la mélodie, vous laissant à titre d’exercice le plaisir de la terminer …
Avoir abordé toutes ces caractéristiques physiques sur les notes de musique et ne pas terminer par une petite mélodie serait coupable. Aussi, pour montrer la richesse que peut procurer un petit bruiteur passif, nous allons terminer sur une petite boite à musique. Il suffit de rechercher dans la Fiche n°53 les fréquences correspondant aux notes, de les temporiser et de les séparer par des courts silences. Dans Experience_086.ino je ne fais que commencer la mélodie, vous laissant à titre d’exercice le plaisir de la terminer …

Experience_087 : Diode LASER comme effecteur.
 C’était promis en introduction du chapitre n°13 nous allons utiliser comme périphérique une simple diode LASER. On pourra alors enchaîner sur un chapitre relatif aux capteurs élémentaires. Les diodes électroluminescentes individuelles de type MASER ont envahi le marché et le créneau du domaine des loisirs s’en est emparé pour créer de petits modules tel que celui utilisé lors des prochaines expériences avec des petits modules conçus pour Arduino. (Noter que l’on devrait utiliser le vocable de MASER qui est l’équivalent du LASER mais qui fait appel à la physique du solide.) Dans cette expérience nous allons utiliser un composant individuel pour réaliser une barrière optique. L’avantage de la lumière émise par une diode MASER réside dans la concentration du faisceau émis. Il n’est tout de même pas aussi concentré que celui d’un vrai LASER hélium/Néon comme vous pouvez le vérifier sur Image 024.JPG du dossier <IMAGES>. Sur la toile on trouve des lots de 10 ou de 20 couples Diode LASER / Photorésistance associée à des tarifs relativement modérés. C’est avec de tels composants que j’ai réalisé les butées logicielles de la Pyrograveuse à LASER de puissance décrite sur https://www.robot-maker.com/ouvrages/tome-1-pyrograveuse/ (PUB !)
C’était promis en introduction du chapitre n°13 nous allons utiliser comme périphérique une simple diode LASER. On pourra alors enchaîner sur un chapitre relatif aux capteurs élémentaires. Les diodes électroluminescentes individuelles de type MASER ont envahi le marché et le créneau du domaine des loisirs s’en est emparé pour créer de petits modules tel que celui utilisé lors des prochaines expériences avec des petits modules conçus pour Arduino. (Noter que l’on devrait utiliser le vocable de MASER qui est l’équivalent du LASER mais qui fait appel à la physique du solide.) Dans cette expérience nous allons utiliser un composant individuel pour réaliser une barrière optique. L’avantage de la lumière émise par une diode MASER réside dans la concentration du faisceau émis. Il n’est tout de même pas aussi concentré que celui d’un vrai LASER hélium/Néon comme vous pouvez le vérifier sur Image 024.JPG du dossier <IMAGES>. Sur la toile on trouve des lots de 10 ou de 20 couples Diode LASER / Photorésistance associée à des tarifs relativement modérés. C’est avec de tels composants que j’ai réalisé les butées logicielles de la Pyrograveuse à LASER de puissance décrite sur https://www.robot-maker.com/ouvrages/tome-1-pyrograveuse/ (PUB !)
ontrainte qui résulte du processus d’amorçage d’un LASER, ce dernier ne peut pas être modulé en puissance. Sur ce point particulier les diodes LASER ont un avantage certain, car, comme vous pouvez le vérifier avec Experience_087.ino il suffit de tourner le bouton d’un potentiomètre pour doser à convenance la puissance lumineuse transmise par l’effecteur couleur rubis.
Experience_088 : Une barrière optique.
L’avantage le plus important présenté par une diode LASER par rapport aux diodes électroluminescentes ordinaires, c’est la très faible divergence de son faisceau lumineux. Ce dernier conserve ainsi son intensité sur de grandes distances et peut de ce fait faire une concurrence efficace contre la lumière diurne. Par exemple si dans P043 vous remplacez le bruiteur par une diode LASER, votre signal de détresse sera visible à plusieurs kilomètres. Du reste il ne fait jamais diriger un tel flux lumineux vers une personne qui se trouverait à moins de 30m de vous … et même plus ! Avec Experience_088.ino nous allons simuler une barrière optique qui 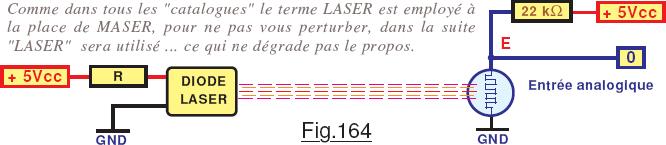 protègerait une maison contre les intrusions, ou qui assurerait la surveillance d’anti-collision avec un portail pavillonnaire lorsqu’un véhicule tenterait de franchir l’entrée alors que la fermeture a été déclenchée. Naturellement, pour notre expérience nous allons simplifier le matériel et ne placer la cellule photorésistante qu’à environ 50cm de la diode LASER. Contrairement au commentaire rédigé en bleu clair qui termine ce paragraphe, le démonstrateur est simplifié à l’extrême. La diode LASER illumine le capteur en permanence, et le signal issu de la cellule photorésistante n’est pas filtré électroniquement. On se contente de noter sur le Moniteur de l’IDE les valeurs numérisées lors du plein éclairage, puis celle qui résulte de l’occultation du faisceau. On fait la moyenne et on adopte ce seuil pour décider s’il y a intrusion ou non. Toutefois, on « filtre » les fausses alertes qui résulteraient du passage intempestif d’un insecte dans le faisceau lumineux. S’il y a intrusion, on se contente d’activer un bruiteur PASSIF durant 2S minimum ou durant toute l’occultation.
protègerait une maison contre les intrusions, ou qui assurerait la surveillance d’anti-collision avec un portail pavillonnaire lorsqu’un véhicule tenterait de franchir l’entrée alors que la fermeture a été déclenchée. Naturellement, pour notre expérience nous allons simplifier le matériel et ne placer la cellule photorésistante qu’à environ 50cm de la diode LASER. Contrairement au commentaire rédigé en bleu clair qui termine ce paragraphe, le démonstrateur est simplifié à l’extrême. La diode LASER illumine le capteur en permanence, et le signal issu de la cellule photorésistante n’est pas filtré électroniquement. On se contente de noter sur le Moniteur de l’IDE les valeurs numérisées lors du plein éclairage, puis celle qui résulte de l’occultation du faisceau. On fait la moyenne et on adopte ce seuil pour décider s’il y a intrusion ou non. Toutefois, on « filtre » les fausses alertes qui résulteraient du passage intempestif d’un insecte dans le faisceau lumineux. S’il y a intrusion, on se contente d’activer un bruiteur PASSIF durant 2S minimum ou durant toute l’occultation.
NOTE : Dans ces expérimentations on s’amuse, et je ne désire pas trop compliquer mes propos. Il me semble toutefois impératif de souligner un point important : La lumière solaire estivale est très énergétique, et aura tendance à saturer les cellules photorésistantes. Aussi, pour différencier la luminosité issue de la diode LASER, sur des projets sérieux on muni le capteur d’un filtre coloré ne laissant passer que la couleur rubis. Puis, le faisceau LASER est découpé en un signal carré de fréquence 3000 à 8000Hz. La sortie des signaux récupérés sur les cellules photorésistantes est alors trillée par des filtres électroniques dont la bande passante est centrés sur cette fréquence de découpage.
Experience_089 : Un cinémomètre optique.
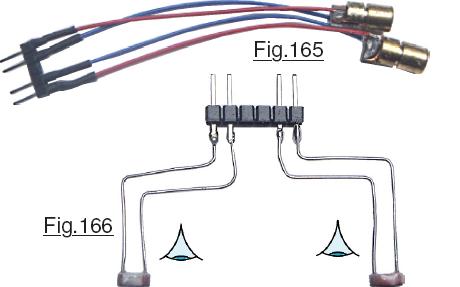 Cette expérience amusante constitue un exercice de révision dans lequel on va utiliser deux barrières optiques décalées pour simuler ces radars urbains incitant les automobilistes à ralentir. Au lieu d’indiquer la vitesse de déplacement du véhicule virtuel, on se contentera de représenter un émoticône sur un afficheur matriciel déjà rencontré dans P020. Le principe adopté pour déterminer « Content/Mécontent » va se contenter de mesurer le temps qui s’écoule entre l’occultation de deux barrières optiques séparées de 38mm. Deux diodes LASER individuelles Fig.165 sont soudées à un connecteur HE14 mâle commun. Même punition en Fig.166 pour les cellules photorésistantes séparées des 38mm annoncés ci-avant. Ensuite il faut assembler ces deux sous-ensembles pour en faire une double « fourche » optique. Pour ma part j’ai bricolé un support improvisé utilisant des chutes inutilisées de polystyrène choc. (Voir le document Réalisation des coffrets.pdf.) Pour voir en détail la réalisation matérielle de ce cinémomètre optique, aller consulter Image 025.JPG à Image 033.JPG préservées dans le dossier <IMAGES>. Pour utiliser ce dispositif, il suffit de téléverser Experience_089.ino et d’occulter plus ou moins rapidement les deux faisceaux lumineux avec un quelconque objet en le faisant transiter dans le sens de la flèche Rouge qui surcharge la photographie d’Image 030.JPG. En effet ce radar routier ne surveille qu’une seule voie. Pour l’agencement électrique on se contente de doubler celui de la Fig.164 et on utilise A0 et A1 pour détecter le passage d’un véhicule. Comme pour les démonstrateurs qui précèdent, la LED Arduino témoigne du fonctionnement de la boucle de base. Si le passage d’un objet bloque void loop() c’est que vous l’avez déplacé dans le mauvais sens. Le Moniteur de l’IDE affiche à chaque « passage d’un véhicule » la durée du chronométrage. Il vous sera ainsi facile d’évaluer la vitesse à partir de laquelle l’évolution est trop rapide. Comme pour P088 moyennant de transformer quelques remarques pour les valider, (Les lignes
Cette expérience amusante constitue un exercice de révision dans lequel on va utiliser deux barrières optiques décalées pour simuler ces radars urbains incitant les automobilistes à ralentir. Au lieu d’indiquer la vitesse de déplacement du véhicule virtuel, on se contentera de représenter un émoticône sur un afficheur matriciel déjà rencontré dans P020. Le principe adopté pour déterminer « Content/Mécontent » va se contenter de mesurer le temps qui s’écoule entre l’occultation de deux barrières optiques séparées de 38mm. Deux diodes LASER individuelles Fig.165 sont soudées à un connecteur HE14 mâle commun. Même punition en Fig.166 pour les cellules photorésistantes séparées des 38mm annoncés ci-avant. Ensuite il faut assembler ces deux sous-ensembles pour en faire une double « fourche » optique. Pour ma part j’ai bricolé un support improvisé utilisant des chutes inutilisées de polystyrène choc. (Voir le document Réalisation des coffrets.pdf.) Pour voir en détail la réalisation matérielle de ce cinémomètre optique, aller consulter Image 025.JPG à Image 033.JPG préservées dans le dossier <IMAGES>. Pour utiliser ce dispositif, il suffit de téléverser Experience_089.ino et d’occulter plus ou moins rapidement les deux faisceaux lumineux avec un quelconque objet en le faisant transiter dans le sens de la flèche Rouge qui surcharge la photographie d’Image 030.JPG. En effet ce radar routier ne surveille qu’une seule voie. Pour l’agencement électrique on se contente de doubler celui de la Fig.164 et on utilise A0 et A1 pour détecter le passage d’un véhicule. Comme pour les démonstrateurs qui précèdent, la LED Arduino témoigne du fonctionnement de la boucle de base. Si le passage d’un objet bloque void loop() c’est que vous l’avez déplacé dans le mauvais sens. Le Moniteur de l’IDE affiche à chaque « passage d’un véhicule » la durée du chronométrage. Il vous sera ainsi facile d’évaluer la vitesse à partir de laquelle l’évolution est trop rapide. Comme pour P088 moyennant de transformer quelques remarques pour les valider, (Les lignes 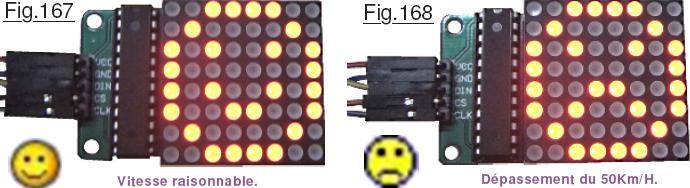 concernées sont mentionnées en tête du listage.) il sera possible de visualiser les valeurs numérisées sur les capteurs photorésistants et ainsi éventuellement optimiser les seuils de décision dans les lignes 72 à 74. Ayant exploré le domaine des effecteurs simples, il est temps d’aborder l’éventail des capteurs élémentaires qui sera suivi on s’en doute des modules
concernées sont mentionnées en tête du listage.) il sera possible de visualiser les valeurs numérisées sur les capteurs photorésistants et ainsi éventuellement optimiser les seuils de décision dans les lignes 72 à 74. Ayant exploré le domaine des effecteurs simples, il est temps d’aborder l’éventail des capteurs élémentaires qui sera suivi on s’en doute des modules
commerciaux fournissant des circuits « clef en main ».
La suite est ici.


