Regroupement dans le dossier <! Petits PROJETS> de divers logiciels et leur documents associés, ce sont des thèmes qui sont bien plus que de simples démonstrateurs. Il faut les voir comme des exercices de révision mettant à profit l’ensembles des acquis du didacticiel pour forger de véritables petites applications qui restent toutefois dans le domaine du ludique Ce chapitre est prévu pour vous les présenter brièvement et ainsi vous inciter à aller vous promener sur ce sentier très séduisant.
 Barre automatique d’un petit navire.
Barre automatique d’un petit navire.
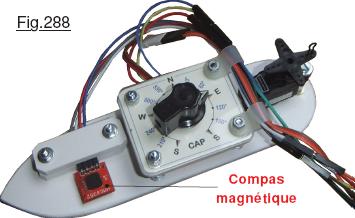
Cette petite application modélisée sur le dispositif de la Fig.288 peut parfaitement s’intégrer sur une petite maquette de bateau. Le capteur est une boussole magnétique électronique HSC5362 associé à un servomoteur. Ce dernier est un MC1811 légèrement plus petit que le SG9OS. (Mis en service pour des raisons de disponibilité.) Le SG90S peut parfaitement le remplacer. Ce programme met en valeur la façon relativement élaborée de procéder aux corrections de cap. Le dossier contient divers documents, deux démonstrateurs et toutes les explications détaillées sur l’approche logicielle pour développer ce programme qui n’est pas du tout élémentaire et a englouti pas mal d’heures de loisir. Attention : Pour fonctionner le croquis a besoin de <OneWire.h> que vous trouverez dans le dossier des <! BIBLIOTHEQUES>.
Un rapporteur à LASER.
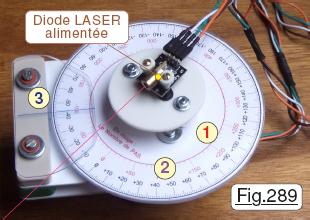 C’est un dispositif qui se résume à un pointeur LASER immobilité sur un petit plateau 1 entrainé en rotation par le moteur PAS À PAS. La rotation du moteur est pilotée par la ligne série USB d’Arduino. On peut ainsi se servir de ce rapporteur électronique soit en sortie, soit en entrée. En sortie, il permet de tracer des angles désirés dans l’espace environnant. On dirige le faisceau lumineux vers la première direction de l’angle à repérer. Puis on impose une consigne de rotation pour la valeur angulaire désirée. Le LASER pointe alors la deuxième direction de l’angle recherché. Utilisé en Entrée, c’est l’application inverse : On désire mesurer un angle compris entre deux éléments de l’environnement local. On fait pointer le LASER vers le premier élément. On mémorise cette « origine ». Puis on le dirige par les consignes USB vers la deuxième référence et l’on demande la position du moteur avec « P« . La différence angulaire entre les deux positions nous donne la valeur recherchée. Un mini-joystick permet de dégrossir les pointages angulaires.
C’est un dispositif qui se résume à un pointeur LASER immobilité sur un petit plateau 1 entrainé en rotation par le moteur PAS À PAS. La rotation du moteur est pilotée par la ligne série USB d’Arduino. On peut ainsi se servir de ce rapporteur électronique soit en sortie, soit en entrée. En sortie, il permet de tracer des angles désirés dans l’espace environnant. On dirige le faisceau lumineux vers la première direction de l’angle à repérer. Puis on impose une consigne de rotation pour la valeur angulaire désirée. Le LASER pointe alors la deuxième direction de l’angle recherché. Utilisé en Entrée, c’est l’application inverse : On désire mesurer un angle compris entre deux éléments de l’environnement local. On fait pointer le LASER vers le premier élément. On mémorise cette « origine ». Puis on le dirige par les consignes USB vers la deuxième référence et l’on demande la position du moteur avec « P« . La différence angulaire entre les deux positions nous donne la valeur recherchée. Un mini-joystick permet de dégrossir les pointages angulaires.
 Un rapporteur « SOLAIRE ».
Un rapporteur « SOLAIRE ».
Analogue à la petite application de la Fig.289, on reprend une bonne partie de son code, tant pour les dialogues sur la ligne série USB que pour la gestion du moteur PAS À PAS. Par contre, le module électronique de la diode LASER qui fonctionnait « en sortie d’information » est remplacé par une électronique élémentaire composée d’un petit circuit imprimé qui permet de mettre en œuvre deux cellules photorésistantes pour prendre en compte l’environnement lumineux local du dispositif. L’asservissement consiste à engendrer un suivi automatique de la source lumineuse prépondérante en orientant le capteur électronique dans sa direction. La Fig.290 présente l’aspect matériel de cette petite application, pour laquelle on retrouve en 1 le petit plateau entrainé en rotation par un moteur PAS À PAS, en 2 le disque gradué et en 3 le réticule gradué.
 Cadre photographies Tactile.
Cadre photographies Tactile.
Véritable projet de petit cadre d’affichage automatique, en Fig.292 l’écran utilisé
est un SLD10261P de 2,8 pouces de diagonale. C’est un écran couleur tactile. Deux démonstrateurs sont disponibles. L’utilisation se fait au moyen d’un clavier virtuel affiché sur l’écran dont toute la surface est sensible au toucher. On peut ainsi définir les modes d’affichage, la lenteur de changement des images etc. Le module inclus une petite carte mémoire qui peut contenir un très grand nombre d’images. Pour que vous puissiez tester les démonstrateurs un dossier <Les images formatées> en contient 150 plus une IMAGEtest.bmp séparée. Deux bibliothèques nécessaires sont fournies dans <! BIBLIOTHEQUES>.
La suite est ici.