


Salut !

Ce fil sera dédié au test de la carte Arduino Nano disponible dans la boutique et notamment utilisable avec le kit pour robot quadrupède.
Description:
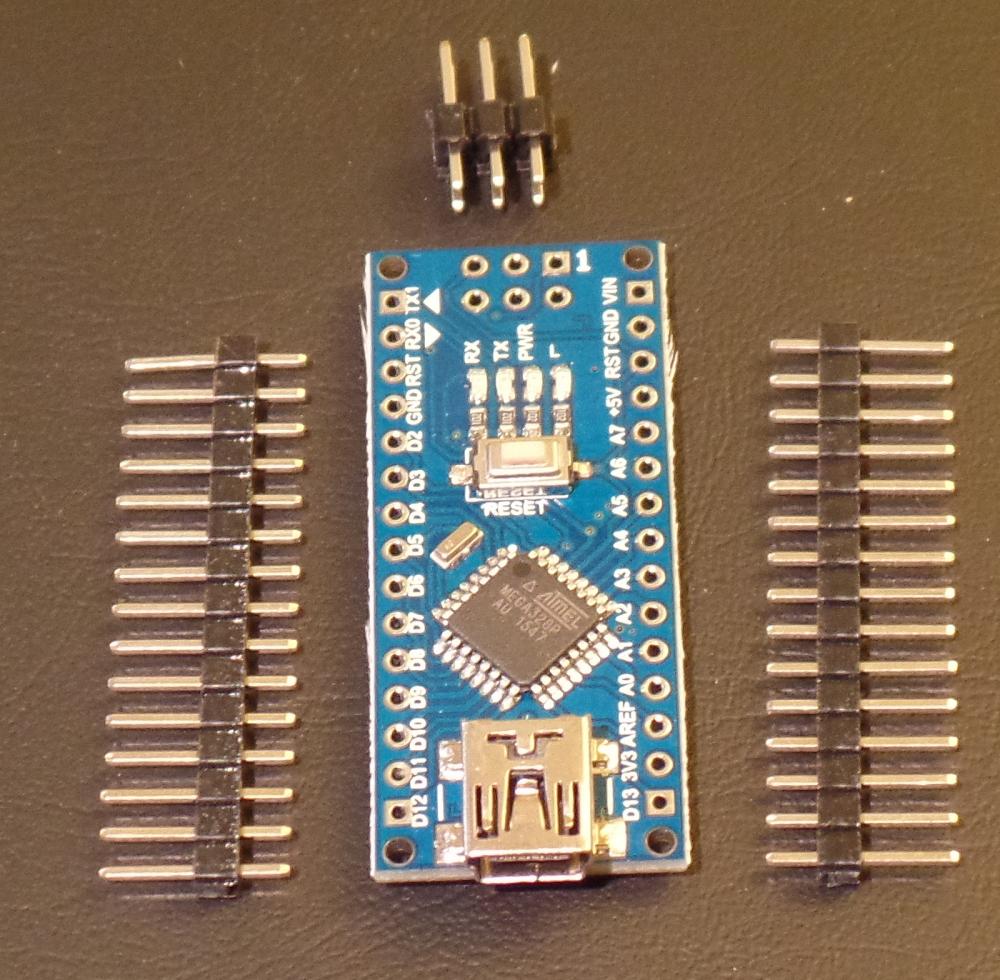
L'Arduino Nano est une carte créée afin de miniaturiser les systèmes à bases d'Arduino et ainsi de les rendre plus légers, ce qui est très pratique en robotique lorsque l'on travaille dans un espace restreint et où le poids peut être un des ennemis du Maker  L'Arduino Nano mesure 45*18 mm et pèse environ 5g. De plus, elle possède la même puissance de calcul qu'une UNO et possède 2 pins analogiques supplémentaires (A6 et A7) et peut fournir 40 mA et 5V par pin digital.
L'Arduino Nano mesure 45*18 mm et pèse environ 5g. De plus, elle possède la même puissance de calcul qu'une UNO et possède 2 pins analogiques supplémentaires (A6 et A7) et peut fournir 40 mA et 5V par pin digital.
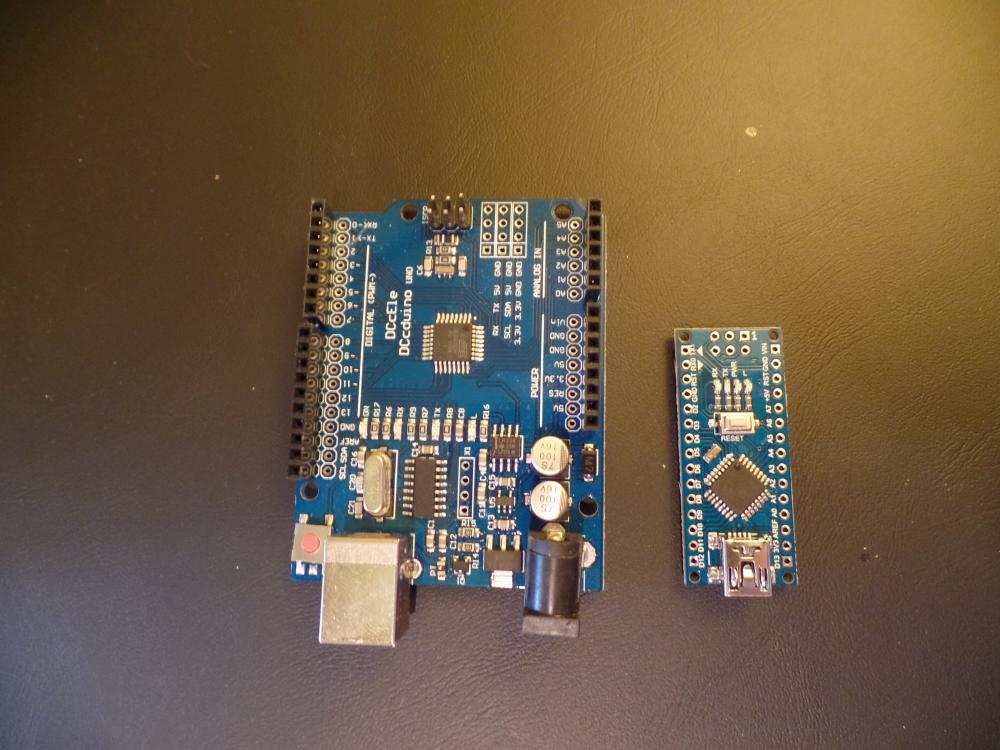
Comparaison avec l'Arduino Uno :
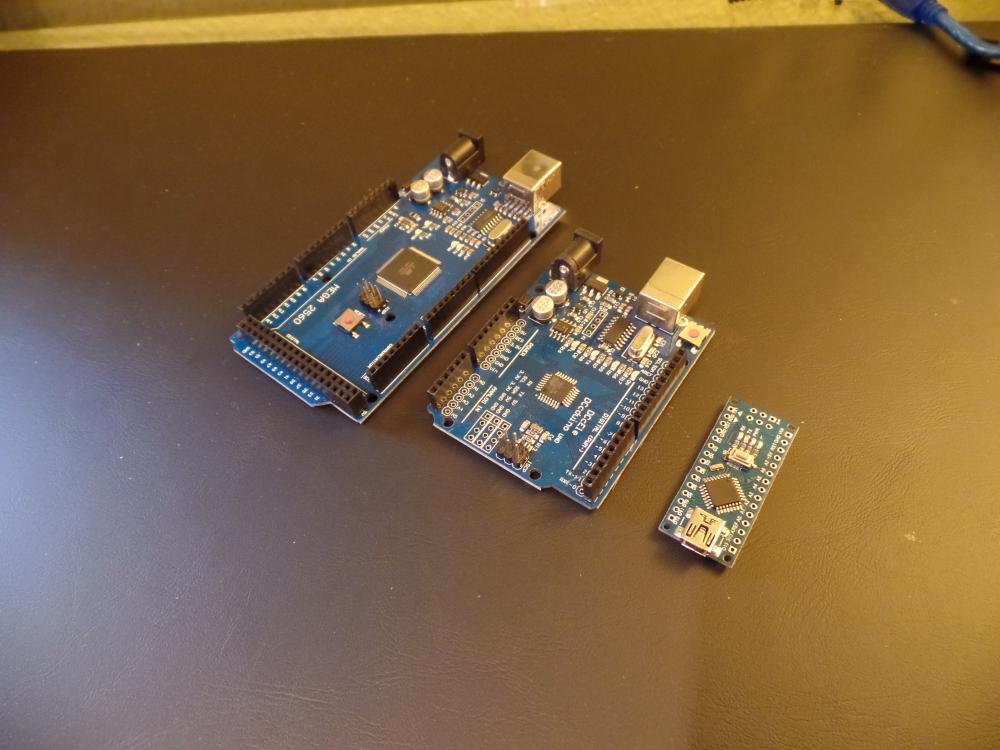
Et la Mega :
Avant de commencer :
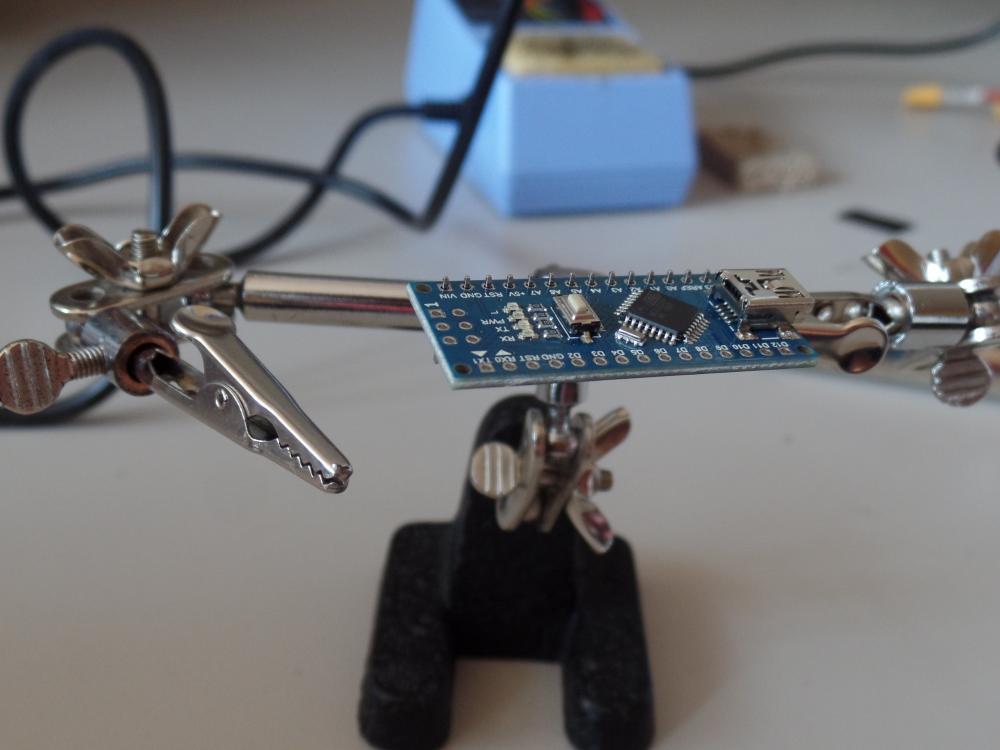
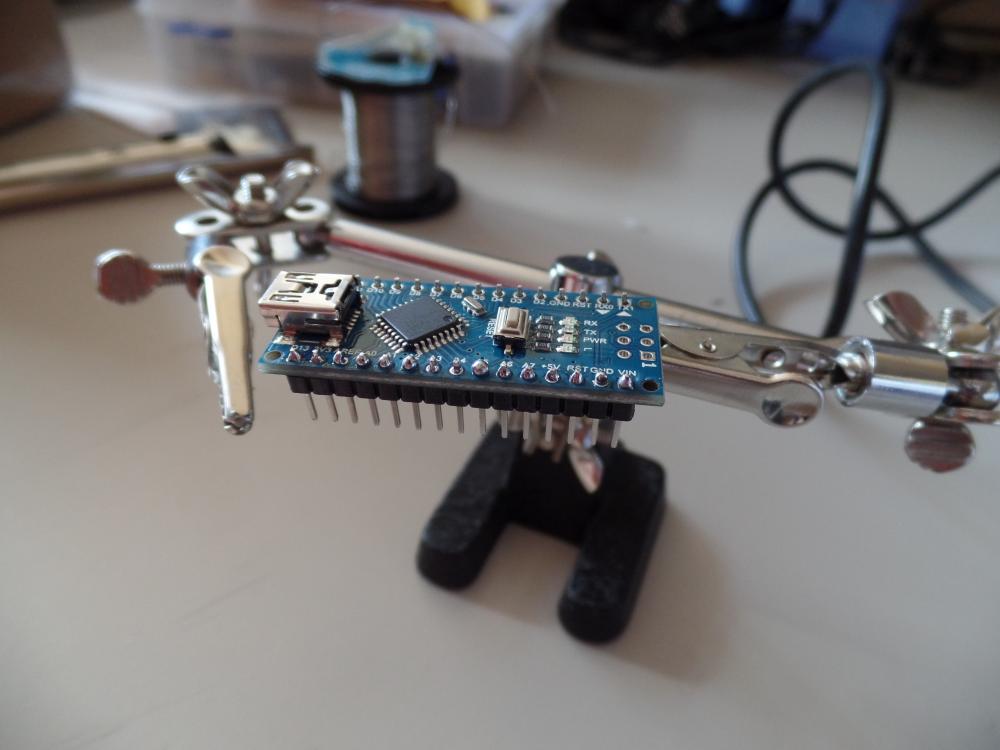
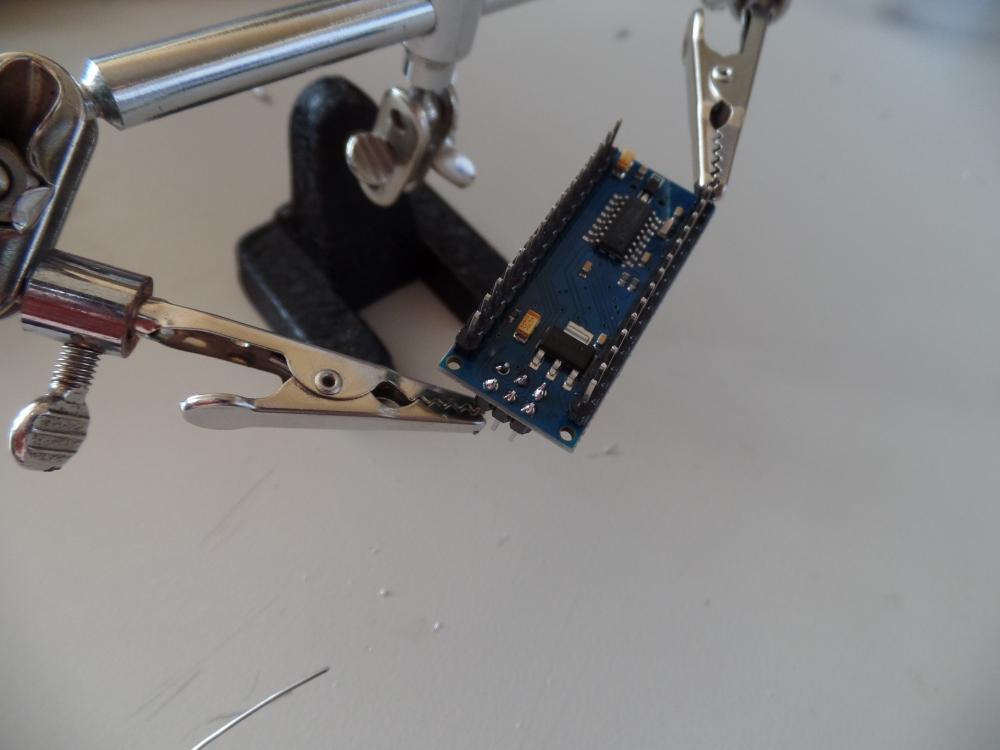
Comme vous avez pu le remarquer, l'Arduino Nano arrive sans les pins soudés à la carte, il vous faudra donc souder chaque pin à la carte afin de s'assurer que tous les pins sont en contact avec la carte . Les soudures se font plutôt facilement, il suffit de faire attention à souder chaque pin sans que les soudures se touchent. N'hésitez pas à utiliser une troisième main et de quoi retirer les soudures maladroites (tresse ou pompe à dessouder).
Pour connecter la carte à votre PC, il vous faudra un câble MiniUSB qui ressemble à ceci:
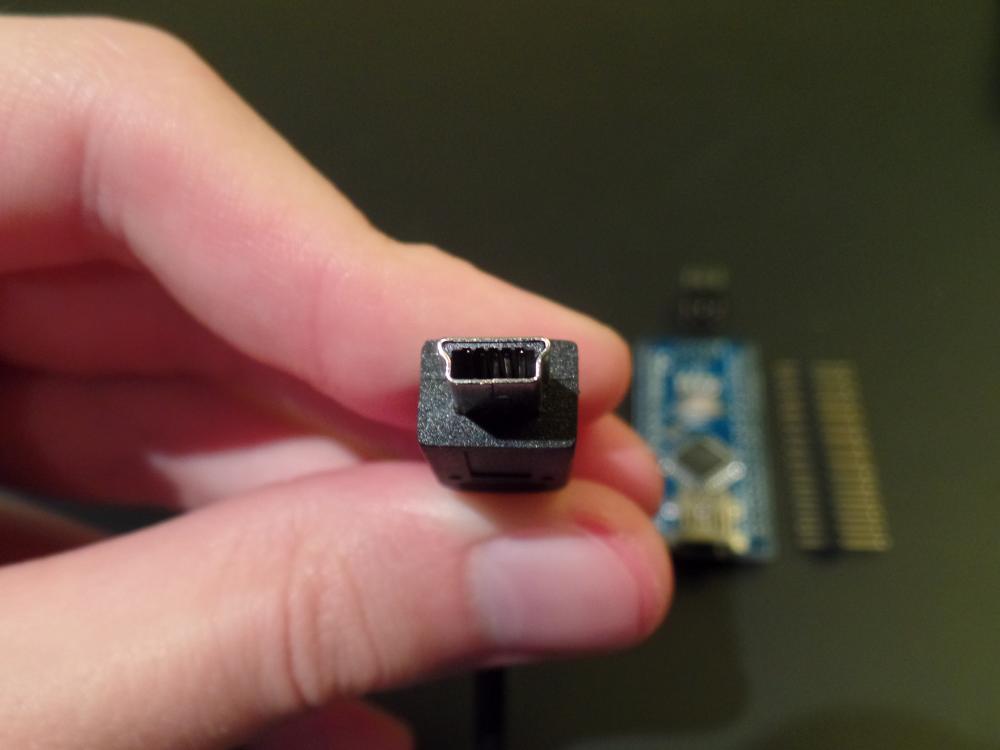
Il n'est pas fournis avec la carte mais c'est un type de connecteur répandu, vous n'aurez aucun mal à en trouver un chez vous, ou dans le commerce si nécessaire.
Vérifier les soudures :
N'étant pas encore très à l'aise avec la soudure, j'ai préféré vérifier que toutes les sorties digitales fonctionnent correctement. Pour cela j'ai fait ce petit montage:
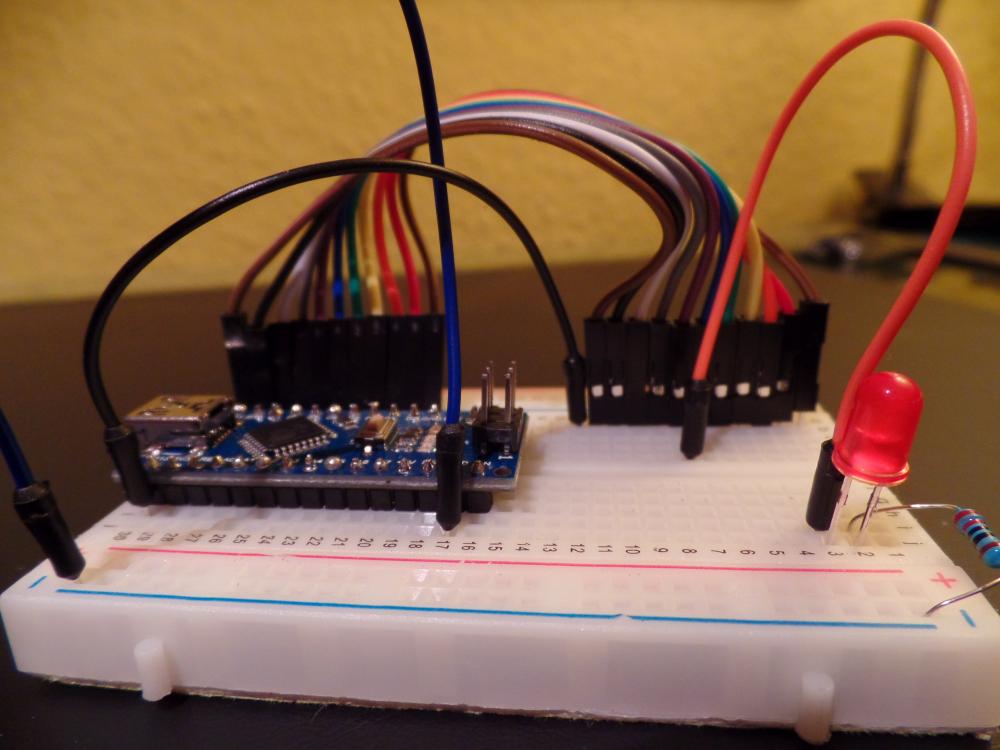
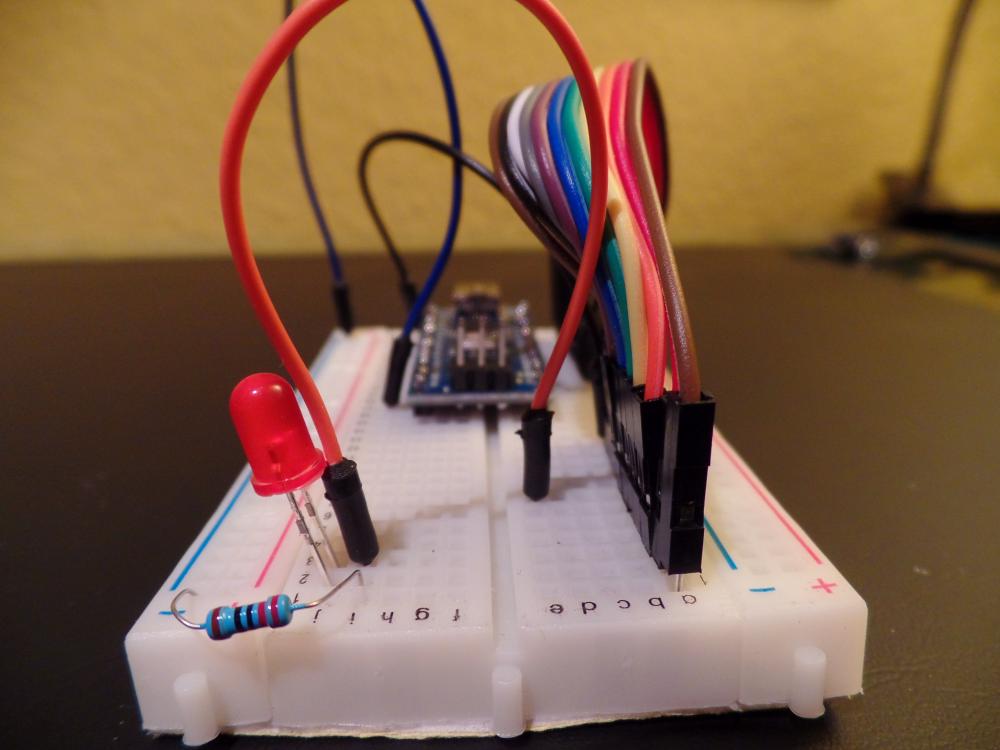
Il permet de tester chaque sortie digitale, de D2 à D13, avec quelques fils, une breadboard, une résistance et une led. Chaque sortie va émettre une tension de 5V 2 fois de suite pendant 1 seconde puis s'éteindre pendant une seconde. Il faudra donc que vous déplaciez l'extrémité du fil orange de droite à gauche.
Voici le programme du montage :
// Pins :
int led2 = 2;
int led3 = 3;
int led4 = 4;
int led5 = 5;
int led6 = 6;
int led7 = 7;
int led8 = 8;
int led9 = 9;
int led10 = 10;
int led11 = 11;
int led12 = 12;
int led13 = 13;
//Variables :
int a = 0;
int pin = 0;
int liste[] = {led2, led3, led4, led5, led6, led7, led8, led9, led10, led11, led12, led13};
void setup() {
//Déclarations :
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(led6, OUTPUT);
pinMode(led7, OUTPUT);
pinMode(led8, OUTPUT);
pinMode(led9, OUTPUT);
pinMode(led10, OUTPUT);
pinMode(led11, OUTPUT);
pinMode(led12, OUTPUT);
pinMode(led13, OUTPUT);
}
void loop() {
pin = liste [a];
if (a<11){
a++;
}
else{
a = 0;
}
digitalWrite(pin, HIGH);
delay(1000);
digitalWrite(pin, LOW);
delay(1000);
digitalWrite(pin, HIGH);
delay(1000);
digitalWrite(pin, LOW);
delay(1000);
}
Voilà pour le début de mon test sur la carte Arduino Nano. J'ajouterais des détails sur le dernier montage prochainement.
A bientôt pour la suite
N'hésitez pas à poster vos questions, conseils ou commentaires 



 Le but c'est de montrer les améliorations au fur et à mesure
Le but c'est de montrer les améliorations au fur et à mesure 













