


J'ai commandé le servo ASME-MXA que j'attends avec impatience.

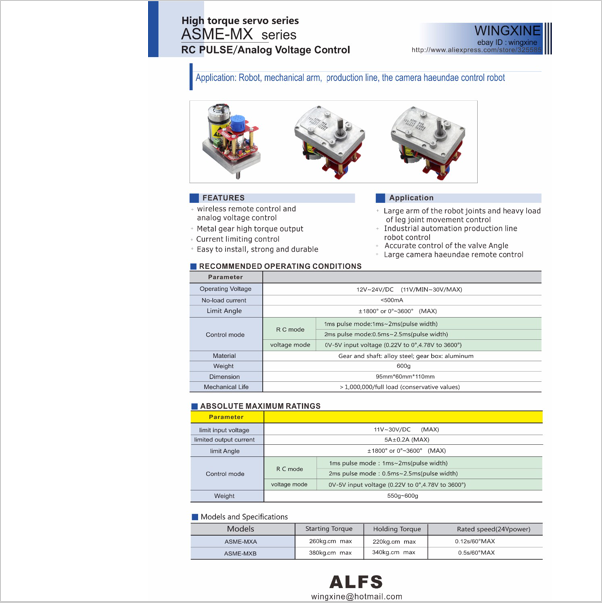
Ce servo a un couple de 260kg.cm, une vitesse de 0,12s/60° et un débattement de 3600°. Comme vous pouvez le constater, c'est du gros !
Le dernier point est important, 3600° cela veut dire qu'il fait 10 tours.
Les servos 10 tours existent depuis longtemps, ils prennent leur origine dans le modélisme des bateaux à voiles où en effet il est nécessaire de faire tourner des cabestans et autres poulies pour monter les voiles ou l'ancre du bateau.
Avec 10 tours, hors l'usage conventionnel, ce servo permet de faire un mouvement linéaire à l'aide d'une vis, par exemple. Un actionneur de ce type permet une puissance et une rigidification du mouvement exceptionnel !
Je n'ai aucune compétence en servo et pour moi, ce sera l'occasion d'en acquérir en même temps que l'utilisation d'une carte Arduino qui va me servir à faire mes tests.
Liste des paramètres du servo ASME-MXA :
- lien : https://fr.aliexpres...0615.0.0.1x4S8S
- fabricant : MLLSE
- référence : ASME-MXA
- prix : 100 (port gratuit)
- couple (starting torque) : 260kg/cm
- couple de maintien (holding torque) : 220kg/cm
- couple de blocage (stalled torque) : ?
- vitesse (rated speed) : 0.12s/60°
- angle :3600°, 10 tours
- tension : 12V à 24V
- courant à vide (No-load current) : 500mA
- poids : 600g



 Reçu !
Reçu !













