
J'aurai aussi mis une diode.

100 réponses à ce sujet

#63

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 avril 2017 - 11:58
Faible valeur, forte puissance ...Sinon on conseille de placer une résistance (faible valeur, forte puissance) en série sur l'alimentation pour absorber ce pic.
Je préfère mettre une diode, comme celles que l'on utilise pour les alims, c'est moins gros et c'est radical, le courant ne passera pas.
Mais bon, je ne suis pas un spécialiste en électronique.
A l'occasion, je testerai.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#64
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 avril 2017 - 06:09
Bon, alors, j'ai soudé une bonne grosse diode sur mon cable d'alim.
La tension est à 14,8V et elle n'en bouge pas d'un poil.
Merci de m'avoir ouvert les yeux sur ce problème.

La tension est à 14,8V et elle n'en bouge pas d'un poil.
Merci de m'avoir ouvert les yeux sur ce problème.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#65
Mike118
-

- Administrateur
-
- 10â¯315 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 avril 2017 - 01:48
Faudrait peut être qu'on vende des diodes sur le shop pour ce produit =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#66
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2017 - 06:40
Faudrait peut être qu'on vende des diodes sur le shop pour ce produit =)
Oui, mais des diodes, il y a en a quelques unes...
Mais une grosse diode d'alim comme celle là, cela est assez spécifique et ça peut rendre service, en effet.
En fait, ce n'est pas la première fois que je vois la tension d'alimentation évoluer dans un circuit, mais je n'y avais pas prêté attention, et c'est vrai que ça peut être grave.
Ulysse et Ashira, vous devriez contacter Samsung sur ce coup là... 
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#68
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2017 - 07:27
SILE 15C, mais c'est pas certain, difficile à voir.Oracid c'est quoi la réf de ta diode?
Mais une grosse diode d'alim, c'est bon !
Toute la série des diodes de redressement 1N4000 devrait faire l'affaire, 0,03€ :
http://www.conrad.fr/ce/fr/product/1262760/Diode-standard-Fairchild-Semiconductor-1N4001-DO-204AL-50-V-1-A-1-pcs?queryFromSuggest=true
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#69
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2017 - 08:38
Voici une autre diode de la même série, la 1N4007, qui est donnée pour 1000V 1A, c'est bon, il y a de la marge...
http://www.conrad.fr/ce/fr/product/1262766/Diode-standard-Fairchild-Semiconductor-1N4007-DO-204AL-1000-V-1-A-1-pcs
http://www.conrad.fr/ce/fr/product/1262766/Diode-standard-Fairchild-Semiconductor-1N4007-DO-204AL-1000-V-1-A-1-pcs
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#70
Mike118
-
- Administrateur
-
- 10â¯315 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 avril 2017 - 08:48
Attention, le voltage n'est pas la seule chose à regarder ... Je ne suis pas sûr de comment tu as mis la diode dans ton montage, mais si tu l'as mis en série la diode se prend donc tout le courant que tu fais passer dans ton montage ... si tu prends qu'une 1A et que tu fais passer 5A dedans ... c'est pas bon ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#71
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 avril 2017 - 09:09
Euhhh, Mike, c'est 1A pour 1000V... Mais c'est sûr, ça consomme, mais pas beaucoup.Attention, le voltage n'est pas la seule chose à regarder ... Je ne suis pas sûr de comment tu as mis la diode dans ton montage, mais si tu l'as mis en série la diode se prend donc tout le courant que tu fais passer dans ton montage ... si tu prends qu'une 1A et que tu fais passer 5A dedans ... c'est pas bon ...
J'ai mis la diode dans le bon sens, l'anode connectée à l'alim, et la cathode connectée au bornier à vis du servo.
Pour le sens, c'est facile ( A )node, ( C )athode, la A précède le C. La flèche est orientée de l'Anode vers la Cathode, c'est le sens du courant, + vers -.
Et la barre simule un barrage infranchissable ou le signe - , au choix.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#72
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 29 avril 2017 - 05:21
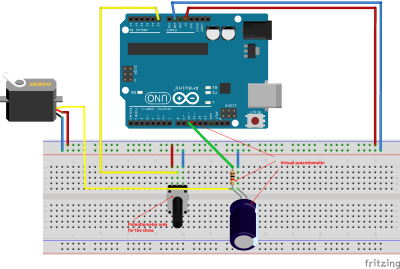
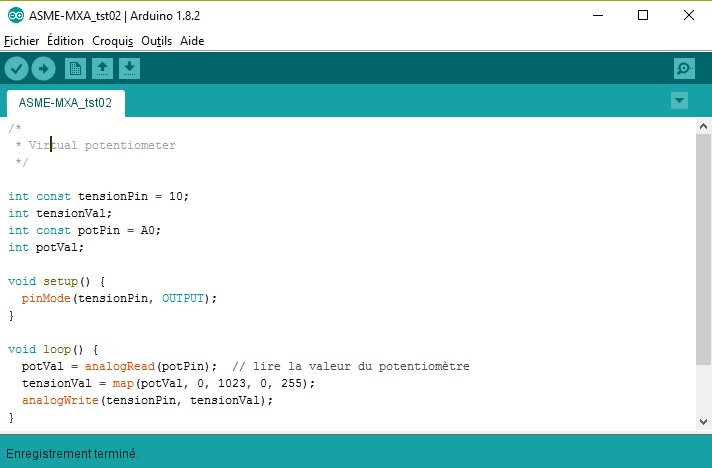
Voici le résultat de la mise en oeuvre de la suggestion d'Ashira concernant l'utilisation d'un filtre RC pour transformer une sortie numérique en sortie analogique.
Ce procédé est très intéressant. Il simplifie la programmation à vraiment quelques lignes et il permet d'utiliser la commande potentiomètre du servo ASME-MXA sans convertisseur analogique/numérique (CAN).
Dans la vidéo, comme je le souligne, le potentiomètre que je tourne, n'est là que pour la démonstration. Sur un robot, il disparaitrait, encore que l'on pourrait l'utiliser comme un capteur d'angle sur une articulation, par exemple. On pourrait considérer cela comme un double asservissement.
Vous noterez que les 14,8V de l'alim ne bouge pas, ceci grace à la diode.
Je suis très enthousiasmé par la facilité de mise en oeuvre de solution simple avec un Arduino.

Ce procédé est très intéressant. Il simplifie la programmation à vraiment quelques lignes et il permet d'utiliser la commande potentiomètre du servo ASME-MXA sans convertisseur analogique/numérique (CAN).
Dans la vidéo, comme je le souligne, le potentiomètre que je tourne, n'est là que pour la démonstration. Sur un robot, il disparaitrait, encore que l'on pourrait l'utiliser comme un capteur d'angle sur une articulation, par exemple. On pourrait considérer cela comme un double asservissement.
Vous noterez que les 14,8V de l'alim ne bouge pas, ceci grace à la diode.
Je suis très enthousiasmé par la facilité de mise en oeuvre de solution simple avec un Arduino.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#74
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 30 avril 2017 - 12:54
Ah ? Je ne connais pas ce genre de schéma.Super la dédicace à la fin ! Je voyais plutôt la résistance en parallèle du condensateur mais apparemment ça marche.
En tout cas merci pour le test
Je vais revoir dans mes bouquins. Pas très orthodoxe, il me semble.
Mais bon, en électronique, rares sont les schémas qui n'ont pas été fait.
De rien...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#75
Mike118
-
- Administrateur
-
- 10â¯315 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 avril 2017 - 02:12
Le filtre RC pour lisser le signal c'est bien comme l'a mis en place Oracid, mais l'ajout de la résistance c'est pour laisser la possibilité de décharger le condensateur quand tu " attaques un système avec très haute impédance " en plus de deux trois autres truc que j'ai oublié 
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#76
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 30 avril 2017 - 06:26
Ouais... Il y a toujours un moment ou je décroche.Le filtre RC pour lisser le signal c'est bien comme l'a mis en place Oracid, mais l'ajout de la résistance c'est pour laisser la possibilité de décharger le condensateur quand tu " attaques un système avec très haute impédance " en plus de deux trois autres truc que j'ai oublié
Avec la tension que je récupère en sortie du filtre, on peut à peine allumer une diode et encore pas longtemps, la tension baisse à 1,7v de mémoire.
Moi, je pensais que c'était parce l'impédance d'entrée de la carte du servo était très élevée que mon montage fonctionnait.
Mais, bon, ça marche bien en tout cas. Mais je vais quand même tester le coup de la résistance en parallèle.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#77
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 30 avril 2017 - 08:48
Bon, alors, je me suis plongé la tête dans mes bouquins.
Alors, les seules fois où j'ai vu une résistance en parallèle au condensateur (en plus de celle du filtre RC) c'est quand elle figurait, la charge.
Mais on ne peut pas dire que la charge fasse vraiment partie du circuit.
Sinon, j'ai bien trouvé ce type de résistance, pas dans un filtre RC, mais dans un circuit oscillant. Cette résistance, je lis le bouquin, "sert à faire passer le courant à la résonnance". Mais là, on est quand même assez loin du filtre RC.
Mais si vous avez des exemples, je suis preneur.
Il y a quand même quelque chose qui me chagrine, c'est que l'on perd toute la puissance, on peut même pas allumer une led, mais elle va où cette puissance ?
Alors, les seules fois où j'ai vu une résistance en parallèle au condensateur (en plus de celle du filtre RC) c'est quand elle figurait, la charge.
Mais on ne peut pas dire que la charge fasse vraiment partie du circuit.
Sinon, j'ai bien trouvé ce type de résistance, pas dans un filtre RC, mais dans un circuit oscillant. Cette résistance, je lis le bouquin, "sert à faire passer le courant à la résonnance". Mais là, on est quand même assez loin du filtre RC.
Mais si vous avez des exemples, je suis preneur.
Il y a quand même quelque chose qui me chagrine, c'est que l'on perd toute la puissance, on peut même pas allumer une led, mais elle va où cette puissance ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#78
Mike118
-
- Administrateur
-
- 10â¯315 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 avril 2017 - 09:04
Tu as une résistance en série sur le circuit, si la valeur de cette résistance est trop importante par rapport à la valeur usuelle qu'on met pour limiter le courant dans la led, ça va trop limiter le courant et la led ne pourra même pas s'allumer, car la chute de tension entrainé par le passage du courant dans la résistance fait passer la tension au borne de la led en dessous de la tension limite pour la faire s'allumer ...
Sinon pour l'histoire de la résistance en parallèle pour étudier son effet tu fais le calcul de l'impédance complexe, et la décomposition du signal d'entré Ue(t) en série de fourrier ... Somme des Un cos (wn t + phin ) ...
Document sur la décomposition de fourrier :  Fourier.pdf 243,2 Ko
609 téléchargement(s)
Fourier.pdf 243,2 Ko
609 téléchargement(s)
Du coup dans ton cas si on reprend ton schémas en gros on a r0 et C qui forme "un pont diviseur " et tu as donc
1) Us(t) = Zc Ue(t) / ( Zc + Zr0 )
Z1 dans ce cas est : Zc / (Zc + Zr0 )
Zc = 1/jcw Zr0 = r0
donc Z1 = 1/ ( 1+ j r0c w ) on peut noter 1/r0c = w1 et on obtiens Z1 = 1 / ( 1 + j w/w1 )
2) en ajoutant la résistance r en parallèle on se retrouve avec
Us(t) = Z//rc Ue(t) / (Z//rc + Zr0 )
Z2 dans ce cas est Z//rc / ( Z//rc + Zr0 )
Puisqu'on a en parallèle le condensateur c et une résistance r on a :
Z //rc = 1/ ( 1/Zr + 1/Zc) Zr = R Zc = 1/ jcw
Z//rc = 1 / ( 1/r +jcw ) = R / ( 1+ j rc w )
donc ce qu'on peut déjà remarqué c'est pour chaque partie de la décomposition plus on aura w grand et plus le circuit se comportera comme si il n'y avait pas de résistance.
Plus on aura w faible et plus ça se comportera comme un simple pont diviseur de tension ...
w étant la partie wn des différents éléments de la décompositions ...
bref on continu on a donc
Z2 = r / ( 1+ j rc w ) / ( (r/ ( 1+ j rc w) ) + r0 )
Z2 = 1 / ( 1+ r0/ r + j r0 C w)
Z2 = 1 / (( r + r0) / r + j r0 C w )
si on remplace 1/r0W par w1 on a alors :
Z2 = 1 / ((r+r0)/r + j w/w1 )
On retrouve bien que si w = 0 ( cas d'un signal continu ) on se retrouve avec Z2 = 1/( ( r+r0 ) /r) = r / (r+r0 )
cas d'un pont diviseur de tension classique ...
On peut aussi mettre Z2 sous la forme
Z2 = ( r/ r+r0 ) / ( 1+ j(r/r+r0) w/w1 )
et on peut noter w2 = w1/ ( r/r+r0 ) pour avoir Z2 = (r/r+r0 ) / ( 1+ jw/w2 )
Donc en conclusion,
pour les cas 1) et 2) le comportement est du même type, K / (1+ jw/w0 ) => Filtre passe bas de pulsation propre w0 et de gain K
une chute du gain dans le cas 2 K = r/(r+r0 ) au lieu de 1
et un déplacement de la pulsation propre du filtre w1 => w2 ...
Bon et bien je sais pas si tout ça sera claire pour tout le monde mais moi au moins ça m'a fait réviser un peu tout ça ...
L'intérêt de cette résistance à ajouter en plus dans le cas d'oracid ? et bien du coup je ne la vois pas ... si on veut déplacer la pulsation propre autant directement jouer sur la valeur du condensateur et de la résistance r0.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#79
ashira
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 30 avril 2017 - 09:38
Pour la résistance en parallèle, cette image montre comment varie la tension du condensateur lorsqu'il se décharge.

Si tu n'as pas de résistance en parallèle (équivalent à R très grand) on voit que la tension du condensateur tend vers E, donc elle ne varie pas.
Mais visiblement ton condensateur se décharge quelque part ce qui fait que ça fonctionne.
Si tu n'as pas de résistance en parallèle (équivalent à R très grand) on voit que la tension du condensateur tend vers E, donc elle ne varie pas.
Mais visiblement ton condensateur se décharge quelque part ce qui fait que ça fonctionne.
#80
Mike118
-
- Administrateur
-
- 10â¯315 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 avril 2017 - 10:27
Pour la résistance en parallèle, cette image montre comment varie la tension du condensateur lorsqu'il se décharge.
con6.JPG
Si tu n'as pas de résistance en parallèle (équivalent à R très grand) on voit que la tension du condensateur tend vers E, donc elle ne varie pas.
Mais visiblement ton condensateur se décharge quelque part ce qui fait que ça fonctionne.
Le condensateur se décharge dans le reste du montage car l'impédance du servo ou autre truc qui lit la valeur analogique n'est pas infini ... de plus le condensateur se décharge aussi et surtout lorsque son signal pwm est à l'état bas. Il se décharge alors à travers la résistance r0 ... alors que si il y avait la résistance r et la résistance r0 il se déchargerait à travers les deux résistances ... ce qui au passage explique aussi le déplacement de la pulsation propre du filtre passe bas quand on rajoute cette résistance ...
- ashira aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




