En effet, je n'ai pas été vraiment satisfait de la version précédente, http://www.robot-maker.com/forum/topic/11367-yorkshire-mon-petit-quadrupede/, qui m'a donné beaucoup de travail pour un résultat quasi nul.
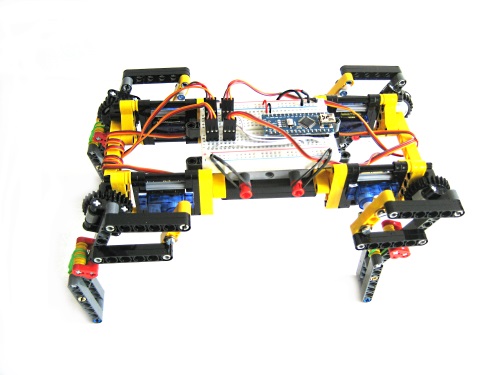
Dans le cadre de cette réalisation, j'ai décidé de tenter le mariage entre Arduino, Lego et des servos courants.
Cette étude a donné lieu à ma dernière vidéo, ici http://www.robot-maker.com/forum/topic/11459-arduino-servo-sg90-brick-compatible/qui remporte un bon succès.
On en a déjà parlé, vous remarquerez le déport des servos par rapport aux axes des articulations jambes. J'ai décidé de faire ainsi après avoir constaté que la prise directe sur l'axe du servo n'était vraiment pas jouable. Et pourtant, il s'agit là d'un petit quadrupède qui mesure; hauteur 12cm, largeur 14cm, longueur 25cm, avec un poids de 325g. Le poids a donc plus que doublé, mais l'échelle est différente.
J'ai également utilisé un Breadboard, bien adapté à l'Arduino, plutôt que des plaques à souder.
Pour vous donnez un ordre d'idée, cette réalisation m'a pris une journée, conception comprise.
Voilà, maintenant, place aux tests.