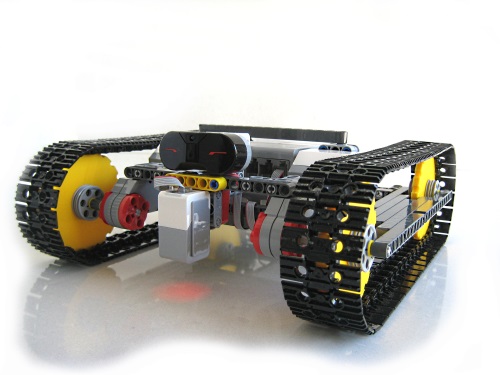
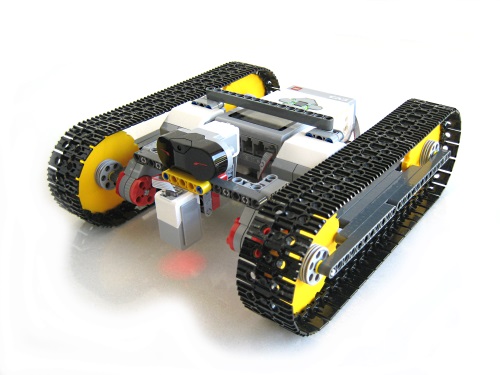
Après beaucoup d'essais, je me suis rendu compte qu'un char n'était pas adapté à l'environnement du concours.
Après tout, un char est plutôt adapté à du tout terrain ou à monter des escaliers, mais pour du plat, on a rien fait de mieux que la roue.
J'ai donc décidé de revoir ma copie.
Voici un 2 roues plus un patin... Oui, j'ai fait plusieurs roues folles, et cela n'a pas été concluant.
J'ai donc eu l'idée de mettre un patin à l'arrière, et cela va très bien, mille fois mieux que n'importe quelle roue folle.
J'adore proposer ce type de d'évolution, c'est simple, efficace et cela supprime un problème sur lequel nombre d'entre nous se sont cassés les dents.
L'émetteur/récepteur à ultra-sons orienté vers le haut est censé stopper le robot sur la ligne d'arrivée qui est matérialisée par une arche façon Dunlop au Man.
La voute de l'arche culmine à 1m... Fastoche !
http://toulouse-robot-race.org/L'émetteur/récepteur infra-rouge, à l'avant, est là pour stopper le robot avec une télécommande en cas d'urgence. Obligatoire, voir règlement.
Le capteur de lumière à l'avant du robot, orienté vers le bas, est le capteur principal qui doit assurer le suivi de la ligne noire.
J'ai fait beaucoup de tests avec le char, aujourd'hui je recommence les tests avec ce nouveau robot. Et bien, je peux vous dire que le PID et moi, on est pas copain... C'est une vrai galère.
Au pire, j'utiliserai une solution "Proportionnel" qui est nettement plus facile à paramétrer.
Cliquez moi.

On dirait une automobile des années 1900.