Posté 28 janvier 2018 - 08:01
Dans ma signature, tu as le lien vers ma chaine vidéo où tu trouveras une série de 13 vidéos qui présente la progression de mes connaissances sur le sujet.
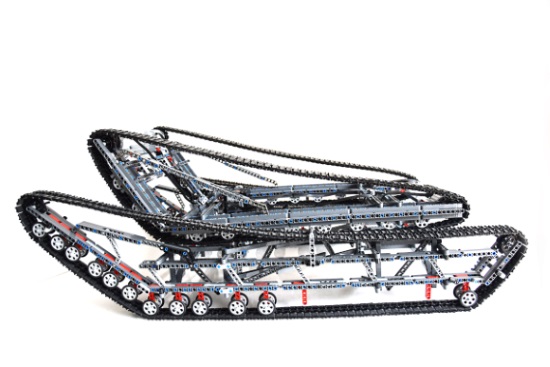
En résumé, l'écart entre 3 marches est de 60cm. Donc la semelle d'un char doit avoir une longueur de 60cm pour monter un escalier. Mais si ton escalier a des nez de marche, alors il faut ajouter à ton char un angle d'attaque d'une hauteur d'au moins 17cm (la taille d'une marche, c'est normalisé). Ce qui nous fait un char de 85cm.
Mais on peut ruser et se servir de la longueur de l'angle d'attaque pour faire nos 60cm, cela génère un léger basculement de l'engin, mais c'est acceptable.
60cm, c'est très théorique. En réalité, le char doit faire un bon 62cm pour grimper. Malheureusement, j'ai dû aller jusqu'à 65cm, en dessous, ça ne grimpait pas. Mais je tenterai d'améliorer ça.
Voir un char de 85cm déambuler dans la maison, crois moi, c'est énorme. Déjà, 65cm, c'est assez gros, mais beaucoup plus raisonnable.
Avec ce char, je montre que l'on peut réaliser un robot de surveillance pour un entrepôt, par exemple, contenant des étages et donc des escaliers, avec une taille raisonnable. Actuellement, ce genre de chars, comme les démineurs, ont une longueur d'environ 85cm à 1m, voir plus.
La plus part du temp ils possèdent des petits bras qui sont censés diminuer la taille du char tout en permettant de gravir n'importe quel escalier. Mais cela complique énormément la mécanique, car il faut rajouter au minimum 2 moteurs pour les petits bras. Un moteur pour la rotation des chenilles et un moteur pour l'asservissement.
Avec mon char qui pourrait n'avoir que 2 moteurs (4 avec Lego, car pas assez puissants) je montre que l'on peut faire un mobile très simple qui fait bien le job.
Merci pour ton intérêt à mes réalisations.