Bonjour,
NB : quand je parles de gauche et droite, c'est par rapport aux images que tu poste (possible que d'un point de vue du robot ce soit inversé selon si le PCB est monté à l'avant ou à l'arrière).
1) Pour la diode SS510 : s'il s'agit de celle là ( https://www.rectron....heets/ss510.pdf ), alors oui, c'est bon (en général, essaye de mettre le lien vers les datasheet : ça nous facilite la vie, et ça évite le risque de confusion (par exemple Conchip fabrique la SS510-HF avec des caractéristiques assez similaires, mais de petites différences).
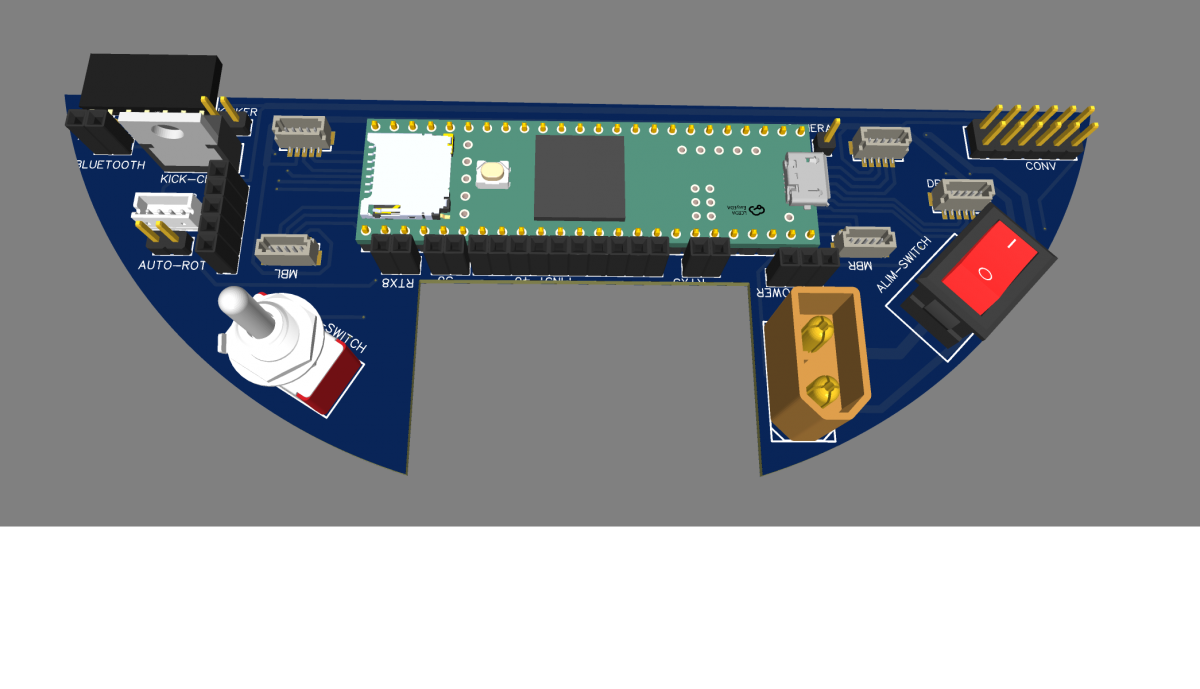
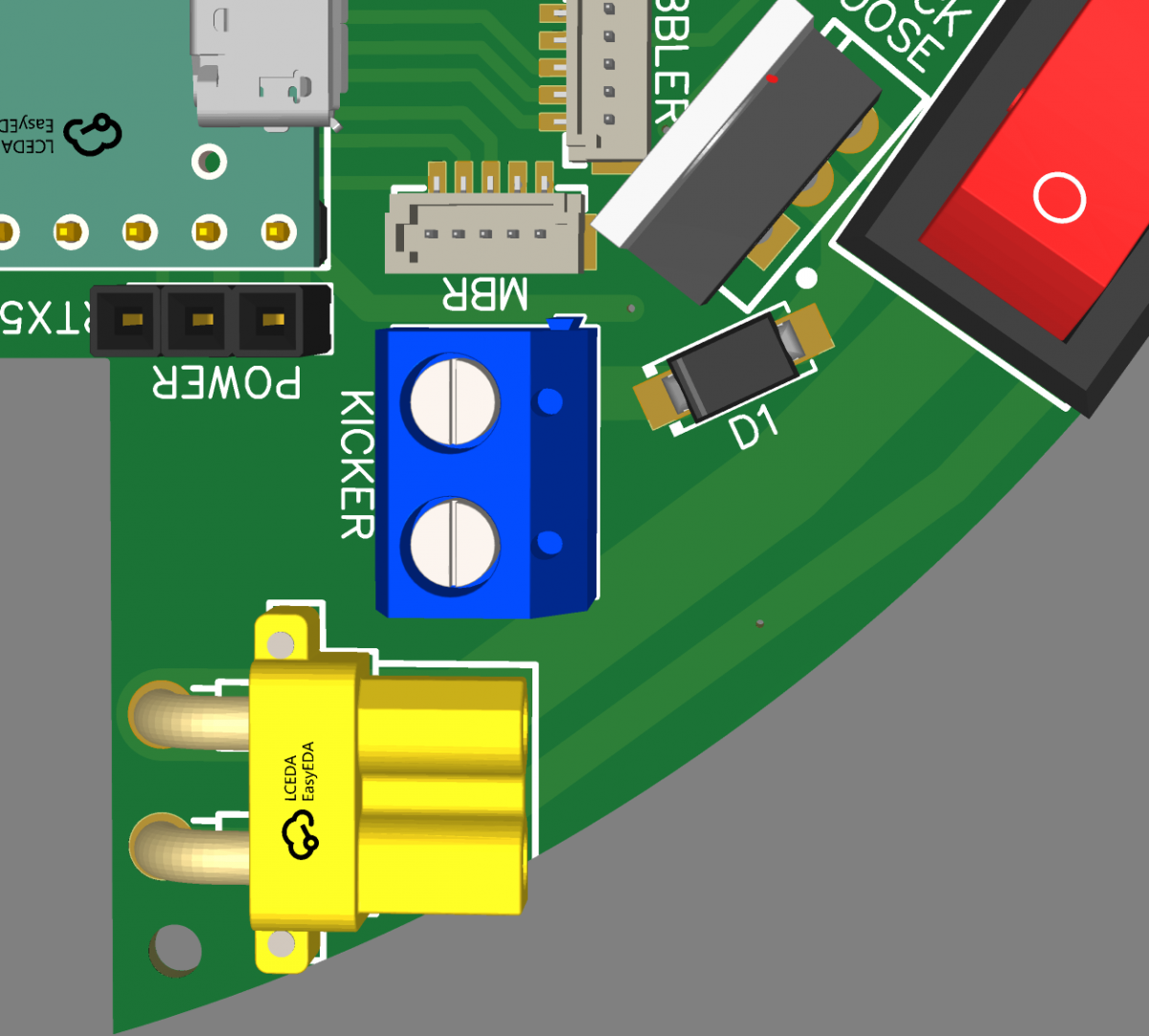
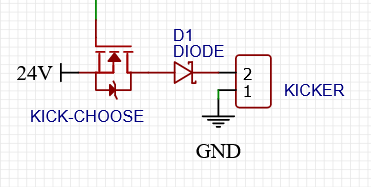
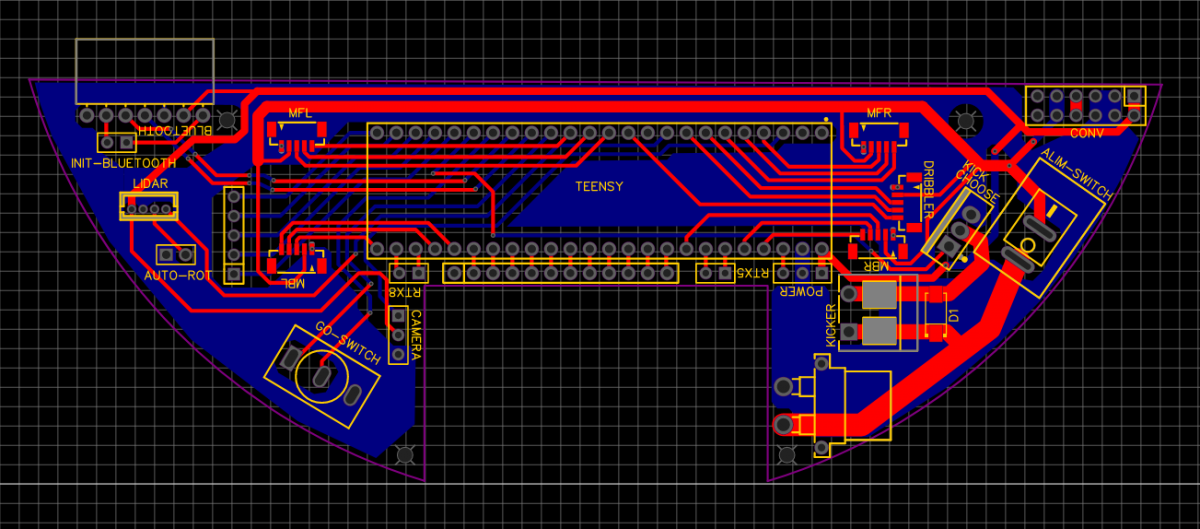
1 bis) Pour la diode SS510 : tu l'a branchée comment? Avec la vue 3D, j'ai l'impression que tu l'a mise en série avec le solénoïde, alors qu'il faut la mettre en parallèle (dans le sens "bloquant"). N'hésites pas à partager ton schéma mis à jour pour vérification.
2) Pour l'IRF520, s'il s'agit bien de celui-ci ( https://www.vishay.c...1017/irf520.pdf ), alors je te le déconseille avec la Teensy en 3.3V : à la page 2 de la datasheet, tu as:

Donc selon les conditions d'utilisations (température, tension d'alim, vieillissement, ...) et selon les aléats de fabriquation, la tension de seuil est quelque part entre 2 et 4V. Donc avec une arduino Uno à 5V, ça suffira pour allumer l'IRF520. Avec la Teensy à 3.3V, ça peut marcher si le seuil est proche des 2V, ou ne pas marcher si le seuil est proche de 4V. Ou marcher de manière intermitante si le seuil est proche de 3.3V (par exemple ça marchera ou pas selon la température de la pièce!, ou alors parfois le courant sera moindre). Bref, je te conseille vivement de choisir un modèle avec un VGS(th) "pire des cas" inférieur à 3V.
3) Pour les convertisseurs DC/DC à souder directement, vu le courant que tu demandes, il y en a plein qui peuvent convenir. Voici une liste chez digikey dont la majorité devraient convenir : https://www.digikey....BKSpzrkFwciGUAA (j'espère que le lien fonctionnera, dans le cas contraire, prévenez moi, et je listerais des exemples)
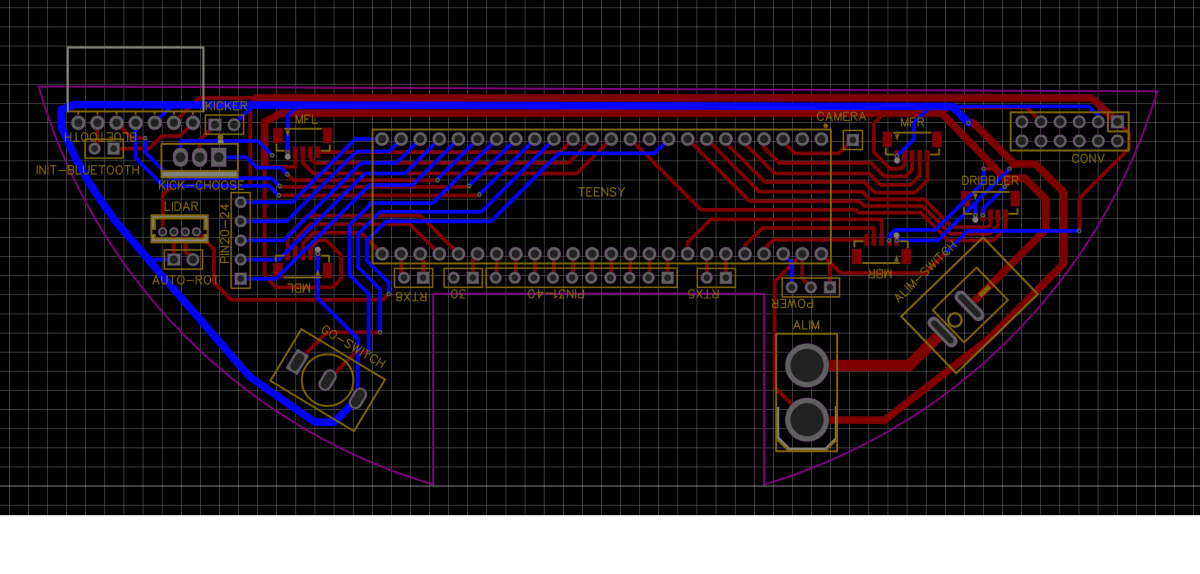
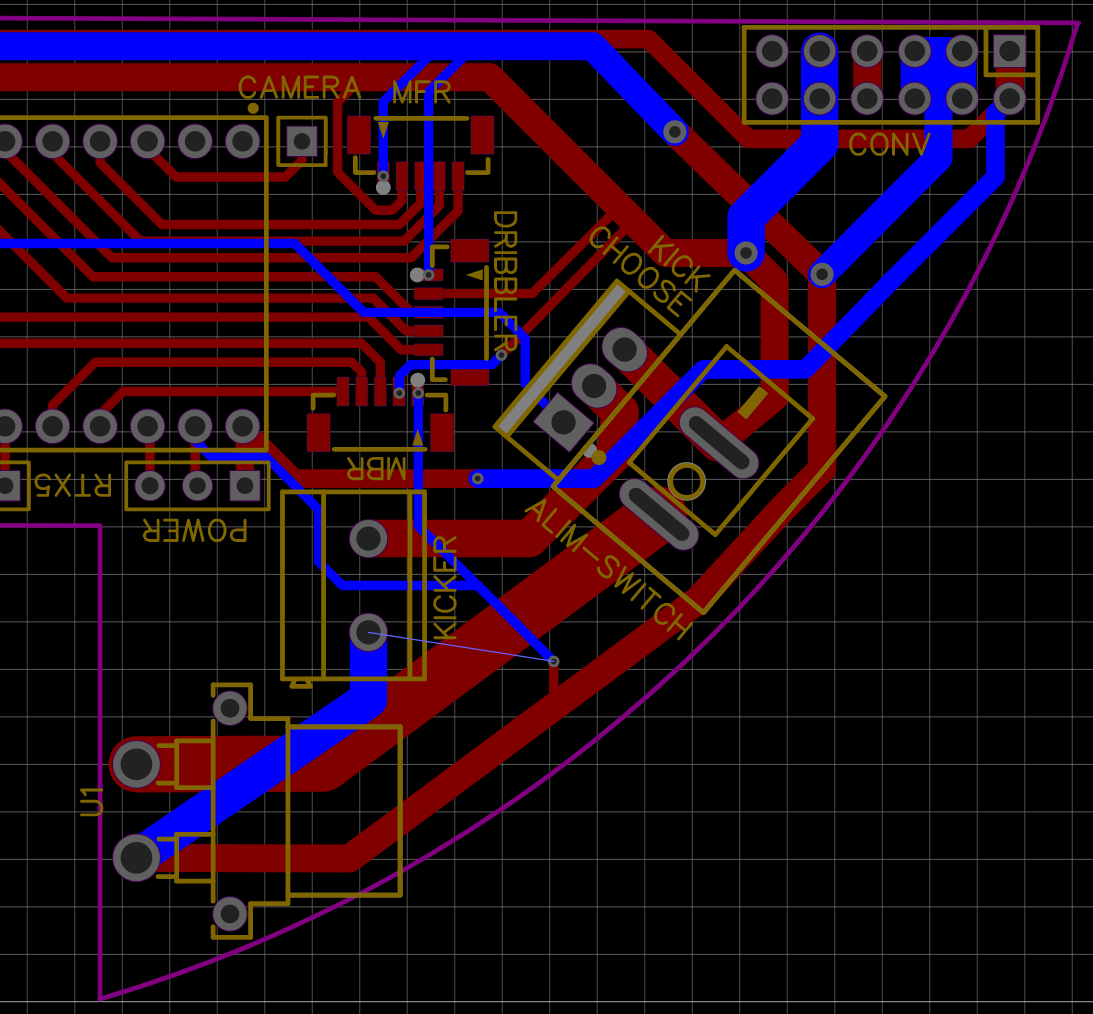
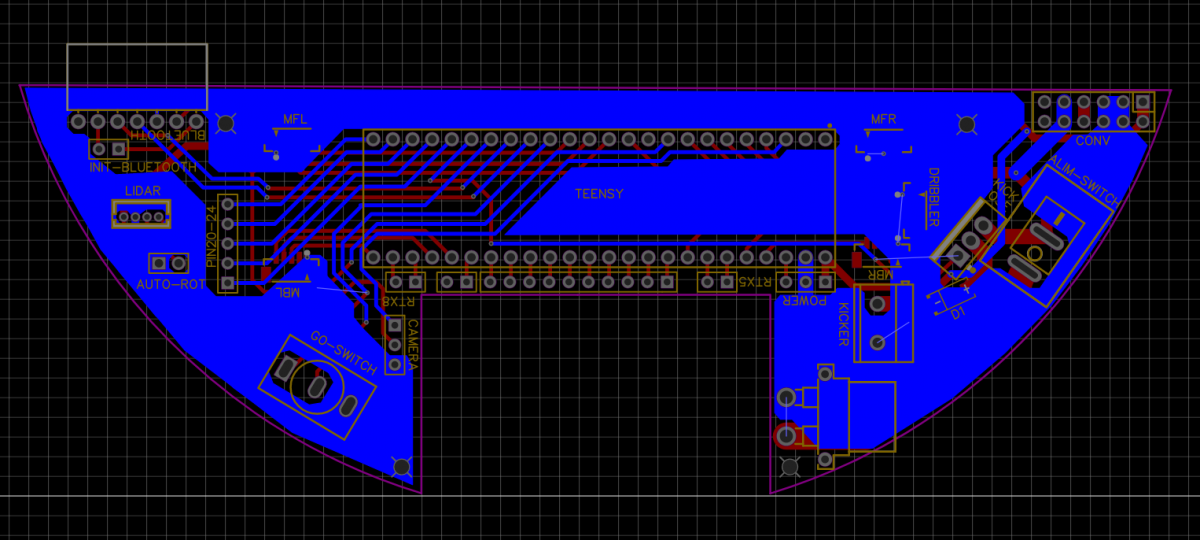
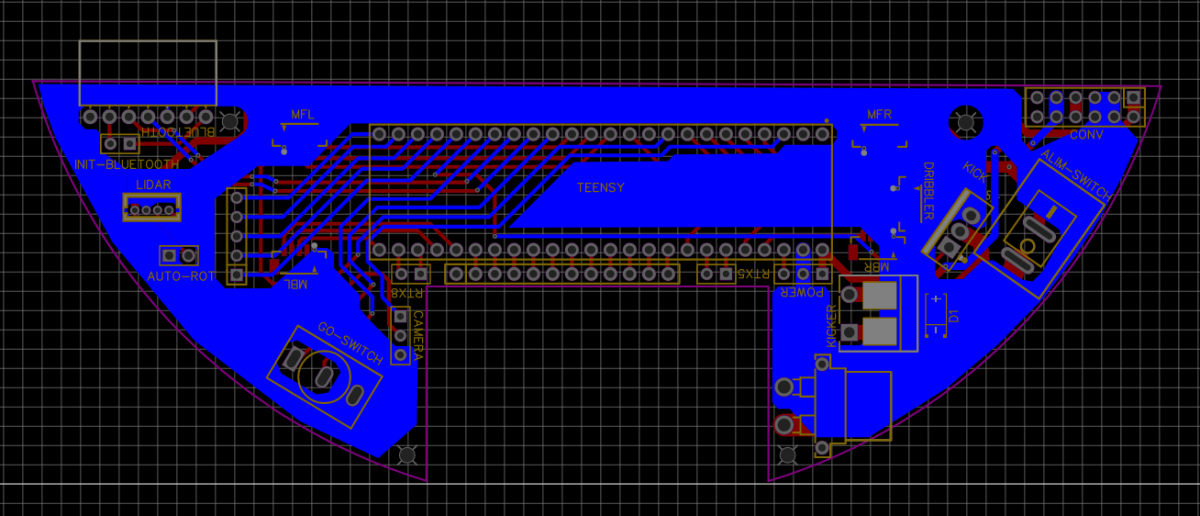
4) Pour le plan de masse, à choisir, il vaut mieux l'avoir en partie droite (là où arrive l'alim) qu'en partie gauche. Pour moi, ça reste tout à fait faisable de faire un plan de masse sur quasi toute la surface du PCB. Ton projet est fait sous EasyEda, c'est bien ça? Si oui, si tu as envie de me partager une copie du projet, je peux te faire un exemple de routage avec plan de masse si tu veux. Si tu ne veux pas faire de plan de masse, vu tes composants, il y a de fortes chances que ça marche quand même (des pistes de GND le plus large possible et les plus courtes possibles aident). Par contre, sur des projets plus complexes avec des signaux rapides, sans plan de masse, ça ne marchera pas
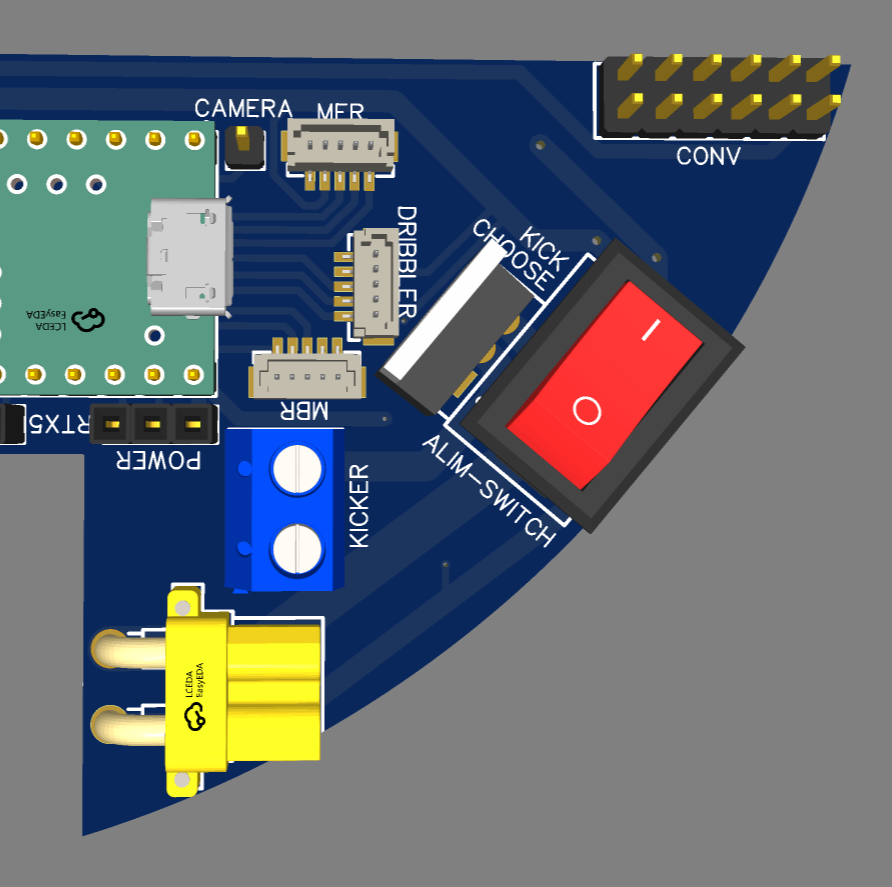
5) Pour ton nouveau connecteur d'alim, vu comment il est placé, ça fera dépasser le câble de ton PCB : est-ce que ça te pose un problème?
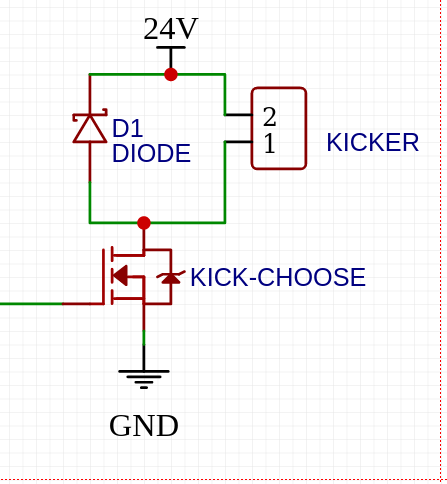
6) Sur ta dernière image de routage (avec uniquement la partie droite), il y a un petit trait bleu qui part du connecteur kicker et part vers la droite (en descendant légèrement) : à priori, ça indique qu'il te manque une connection ou qu'une connection est mal faite. Je te conseille de vérifier. N'hésites pas non plus à exécuter la vérification automatique des erreurs (sur easyEDA : Design/Check DRC), qui peut te détecter ce genre d'erreurs.
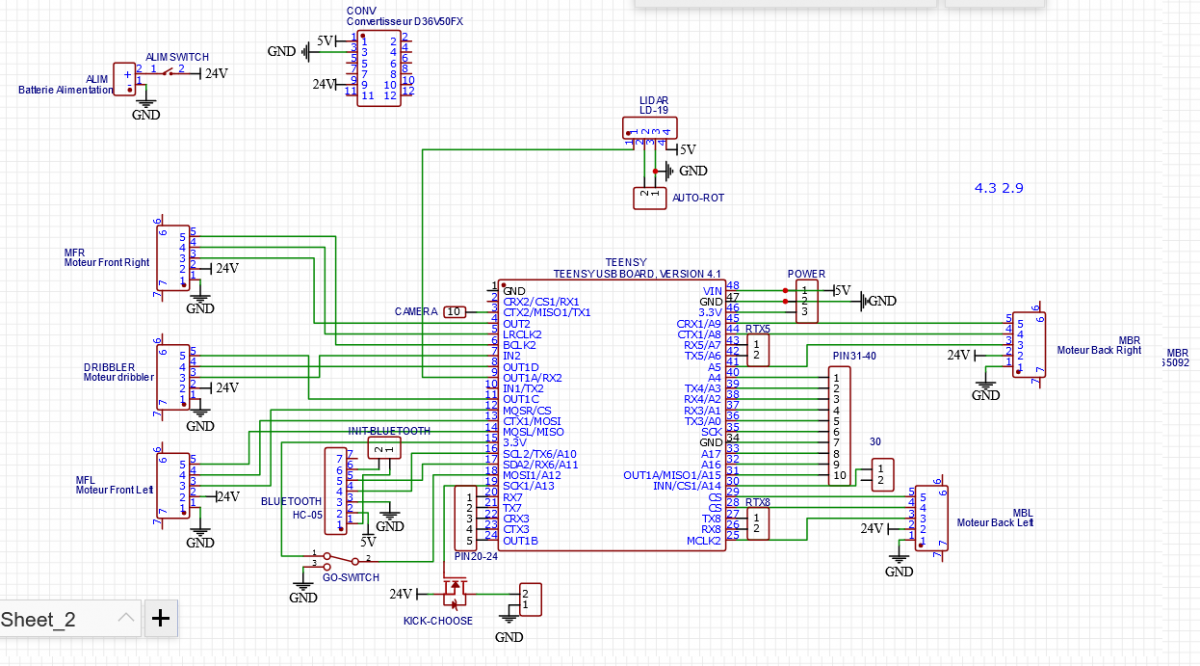
7) Si tu utilises un GND et une alim, et un pin séparé pour la caméra, pourquoi ne pas lui faire un connecteur dédié avaec tout ce dont elle a besoin?
8) Oui, un via donné a une résistance donnée, et donc ne peut supporter qu'un courant limité (si tu ne veux pas perdre trop de tension). Après, en général, plutôt que de mettre un très gros via, on en met plusieurs petits : ça donne de meilleurs résultats (si tu double le diamètre du Via, tu ne multiplie que par 2 la section (donc tu divises par 2 la résistance), alors que tu multiplie par 4 la surface ; alors que si tu augmentes le nombre de vias, en multipliant par 4 la surface, tu multiplies aussi par 4 le nombre de vias, donc tu multiplie par 4 la section, donc tu divises par 4 la résistance). Donc en gros, si tu multiplie la surface par 4, tu divises la résistance par 2 si tu augmentes la taille des vias, vs par 4 si tu augmentes leur nombre. À noter qu'avec un plan de masse, tu as déjà le GND disponible partout, donc ça limite fortement le nombre de vias nécessaires (et le GND est ce qu'il y a de plus sensible : une "erreur" de tension sur le GND, et c'est comme si tu avait cette erreur sur tous les signaux).