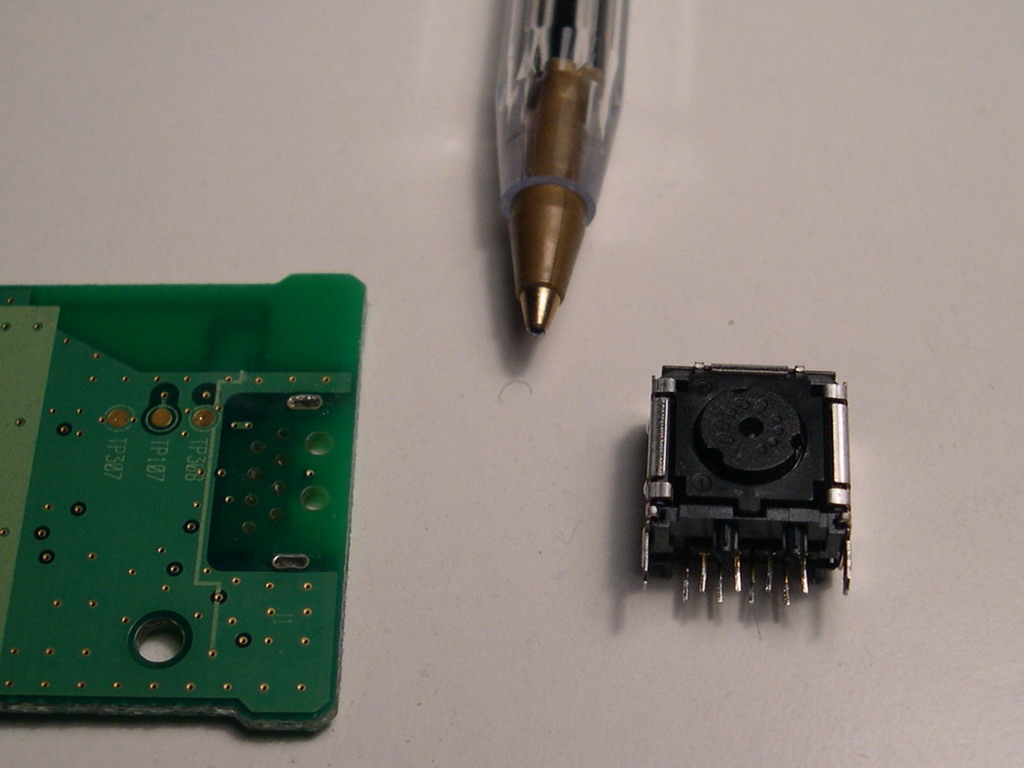
C'est un capteur assez simple, très petit, mais très performant. C'est une mini caméra Infra Rouge. Elle est capable de détecter et localiser en 2D jusqu'à 4 spots Infra Rouges. Ca s'interface en I2C. Le capteur renvoie directement les coordonnées 2D des spots, un peu comme le ferait une CMUCAM. Donc pas besoin de puissance de calcul pour exploiter ça. La fréquence de raffraichissement est monstrueuse, on peut dépasser les 100 mesures par seconde!
http://procrastineering.blogspot.com/2008/09/working-with-pixart-camera-directly.html
http://wiki.wiimoteproject.com/IR_Sensor
J'ai déjà quelques idées d'application.
Leon.