Je vous présente mon projet en cours de réalisation (je suis novice dans la robotique, un peu moins en informatique).
Il s'agit d'un robot d'exploration qui a vocation de devenir autonome (comme une grande partie des robots
 ).
).Le projet s'articule sur 3 composants : une base mobile, un "cerveau" et un "observateur de résultat" (je les détaille un peu plus bas).
Cela se fera a base Arduino et d'Android.
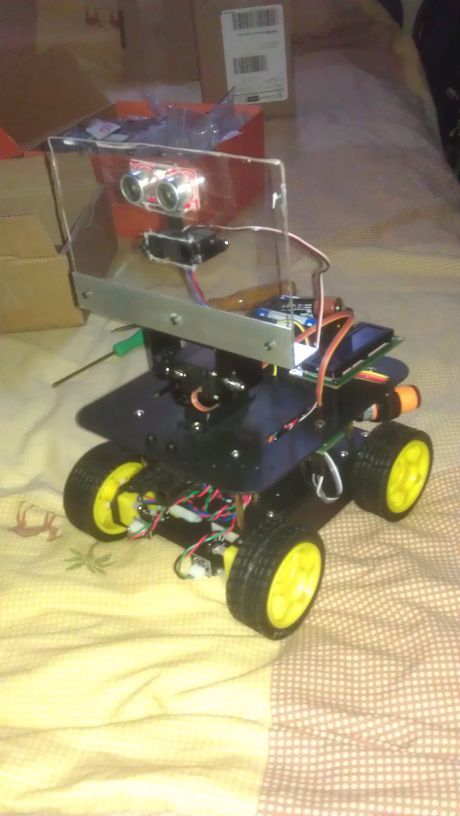
La base mobile est un DFRobot 4WD (plateforme a 4 roues motrices... mais seulement deux dans la realité), celle-ci se voit équipé d'une carte micro-contrôleur DFRobot Roméo v1.0, associé à un module DFRobot Bluetooth v3, 4 switchs de distance, une tourelle tilt/pan ou est logé le "cerveau" (avec deux servos moteurs).
Le cerveau est un téléphone mobile HTC Désire qui communiquera avec la plateforme via Bluetooth. Celui-ci est solidaire de la plateforme mobile (en haut de la tourelle mobile).
Sa camera servira à la reconnaissance et l'analyse du territoire (soft en cours de développement, basé sur la détection de lignes et de reconstruction 3d en temps-réel si c'est possible), il sera aussi le transmetteur des informations à l'"observateur" (streaming audio/video, prise de photos) via Wi-Fi.
Pour info, HTC a supprimé le profil SPP (Serial Port Protocol) du firmware officiel (froyo 2.2), le téléphone a donc été rooté et une version de Cyanogen 7.1.0 R1 a été installée (Gingerbread 2.3.4).
L'observateur est, dans le cas présent, une tablette Acer A500 (Honeycomb 3.2, mais pourrait etre tout autre appareil mobile sous Android avec un écran large) qui sera connectable via Wi-Fi au cerveau. Il recevra les informations (positions, capteurs, flux video) mais pourra, bien sur, prendre le pas sur le commandement du robot.
Ou en suis-je actuellement sur le projet ?
La plateforme mobile est assemblé, les switches réglés, la communication avec le cerveau est établie ainsi que la communication entre le cerveau et l'observateur. Le cerveau ne sert pour le moment que de relai de commande depuis l'observateur. en parallèle, je continu mon travail sur la détection des lignes (algorithme choisi est une simplification de l'algo "RANSAC"... une autre voie est la transformée de Hough).
Qui reste encore a faire : le streaming audio/video et l'envoi des photos du cerveau vers (qui sont stocké sur le portable pour le moment).
Matériellement, je prévois encore une amélioration majeur : l'ajout d'un capteur de distance a ultrason (type DFRobot URM04) qui serait solidaire et orienté dans le sens de la camera (pour la reconstruction 3d).
Et bien sur, l'IA reste entièrement a faire

Maintenant, je ne suis pas sur que le HTC Désire soit assez puissant pour tout faire à la fois... c'est donc aussi un défi a ce niveau là
Dans un premier temps, je finalise le "remote control" entre le cerveau et l'observateur (streaming video en priorité).
Puis je reprends le dev sur la reconnaissance de territoire.
Et ensuite l'IA...
Voila, ca reste assez ambitieux pour une première tentative dans le domaine de la robotique. Mais, j'ai le temps et l'ambition pour le finir ^^
Je prevois de mettre tout en opensource quand ca sera plus stable (finalisation du remote controle).