


J'ouvre un nouveau topic pour exposer les évolutions de mon projet de base robotisé évolutive.
J'ai déjà créé un blog à ce propos : http://www.robot-mak...1-lexplorateur/
Sur ce blog, je mettrais toutes les explications sur les choix de conceptions du robot et des différentes cartes a fin que n'importe qui puisse refaire le robot par lui-même.
Ce topic est plus orienté "suivi du projet" et discussions. Je présenterais mes divers avancés ainsi que les étapes intermédiaires (que je ne mettrais pas sur le blog)
L'Explorateur : Un robot exploreur
Le but premier de ce projet n'est pas de créer un robot qui remplisse une certaine tâche, mais plutôt de créer une base mobile robotisée évolutive. Qu'est ce que ça veut dire ?
Tout simplement que l'on pourra :
- ajouter ou enlever des capteurs de façon totalement transparente pour les autres cartes du robot (pas besoin de changer certaines parties électronique du robot)
- changer une carte spécifique du circuit sans avoir besoin de change toutes les cartes
- changer le module Intelligence Artificielle de façon très simple (pour pouvoir coder l'IA sur une Arduino, une carte mère embarquée ou un PC distant sans problème d'interfaçage avec le reste du robot)
Ça, c'est pour la finalité à cours terme (d'ici un an). A plus long terme, j'aimerais utiliser cette base robotisée pour faire des systèmes multi-agents et y déposer la plateforme SMA développé par mon labo afin de faire des tests concrets.
Le déroulement des étapes
Pour le moment, je compte m'attaquer à la partie bas niveau, c'est à dire à la partie mécanique, électronique de puissance et électronique de commande. Cela me laissera le temps de réfléchir en profondeur à l'architecture que je souhaite mettre en place.
J'espère avoir fini (ou du moins avoir un truc qui marche) cette partie bas niveau (cartes de puissances, carte d'alimentation et carte d'asservissement) avant mars mais bon... ne vendons pas la peau de l'ours !
Une fois la couche basse terminée, je m'occuperais de la partie capteur puis enfin, de la carte IA.
Tâche à effectuer en priorités :
[En cours de réalisation] Base mobile mécanique
[En cours de test] Carte de puissance pour moteur cc
[Réflexion] Carte d'alimentation
[Non débuté] Carte asservissement
[Non débuté] Gestion des capteurs
[Non débuté] Algorithme SLAM
Tâche secondaires :
[Non débuté] Communication avec le PC par Wifi ou Bluetooth
[Non débuté] Communication avec appli Android
L'avancée actuelle
Pour ceux qui ont un peu suivi les débuts du blog L'Exploreur, vous savez que ça fait déjà un petit mois que je réfléchi à ce projet.
J'ai donc déjà une petite idée de l'architecture globale du robot bien que cela reste encore à préciser.
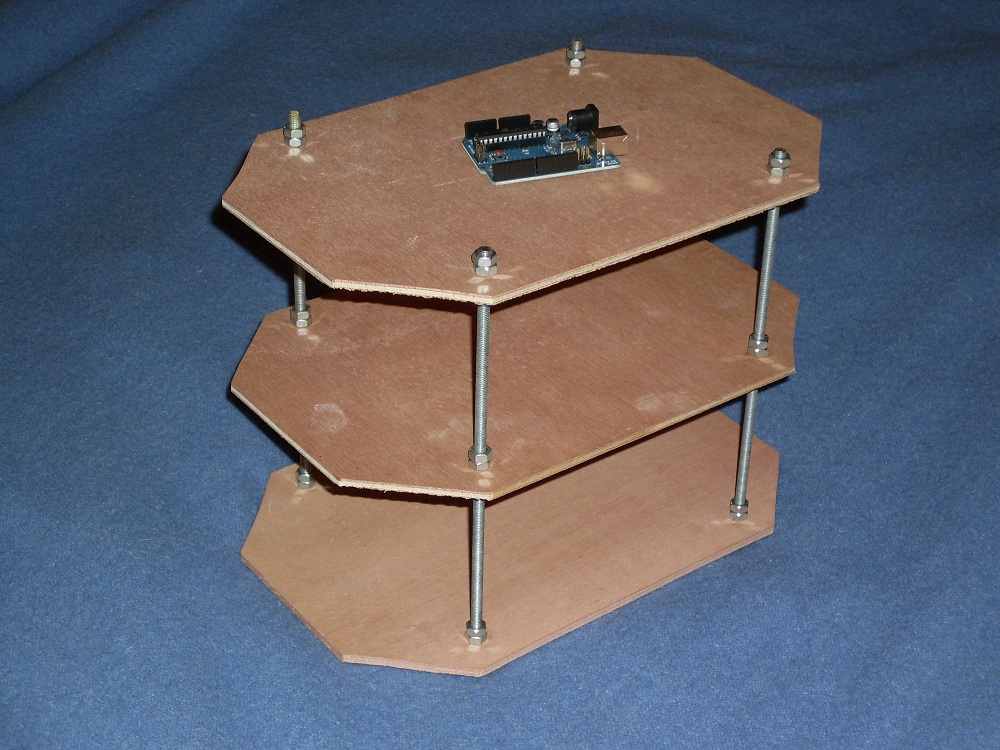
J'ai décidé de faire un robot pas trop grand, mais pas trop petit non plus ! Un socle de 30x20cm m'a semblé une bonne taille et je me suis lancé dans la réalisation du châssis grâce à quelques bouts de contreplaqués que j'ai trouvé dans mon sous-sol.
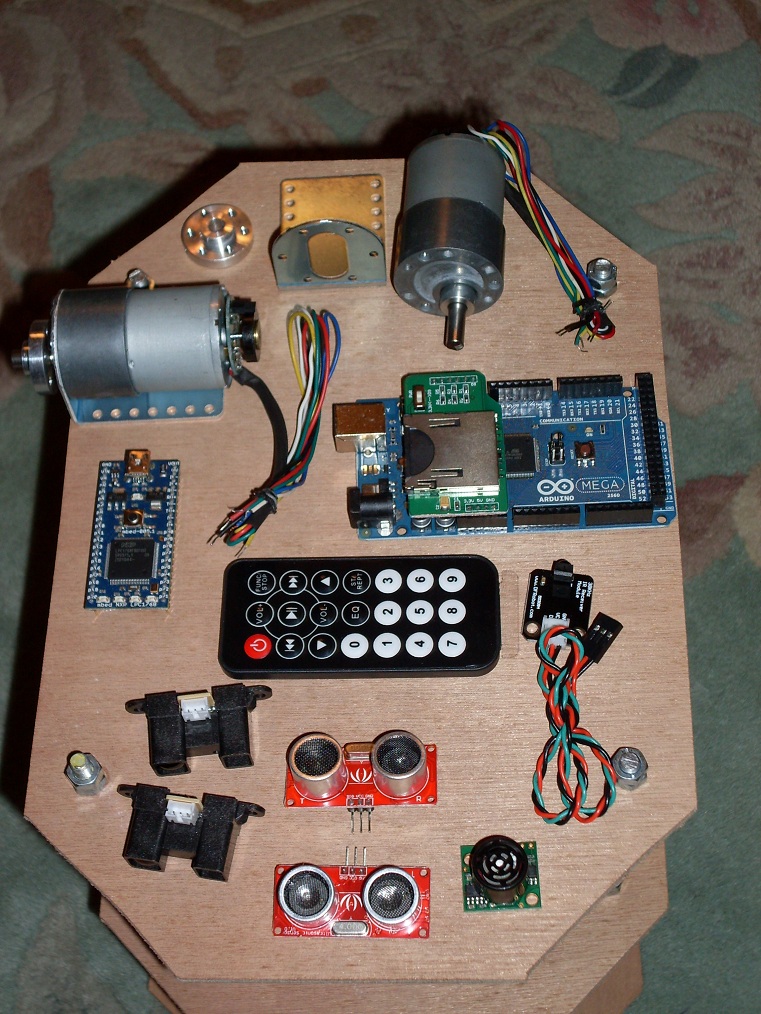
Je viens de recevoir ma commande de capteurs et de moteurs. Je peut maintenant vraiment me lancé dans ce projet

La prochaine étape sera la fixation des moteurs et des roues sur le châssis !
++
Black Templar




















