Je souhaiterais une confirmation avant de faire une bêtise. ^^
je souhaite utiliser 3 boutons poussoirs pour le pare chocs de mon robot, ces boutons seront reliés à mon arduino mega (dans un premier temps, il sera ensuite remplacé par un ATtiny85).. vu que l'ATtiny85 est pauvre en I/O, j'aurais souhaité n'utiliser que deux pins du µC pour les trois BP.
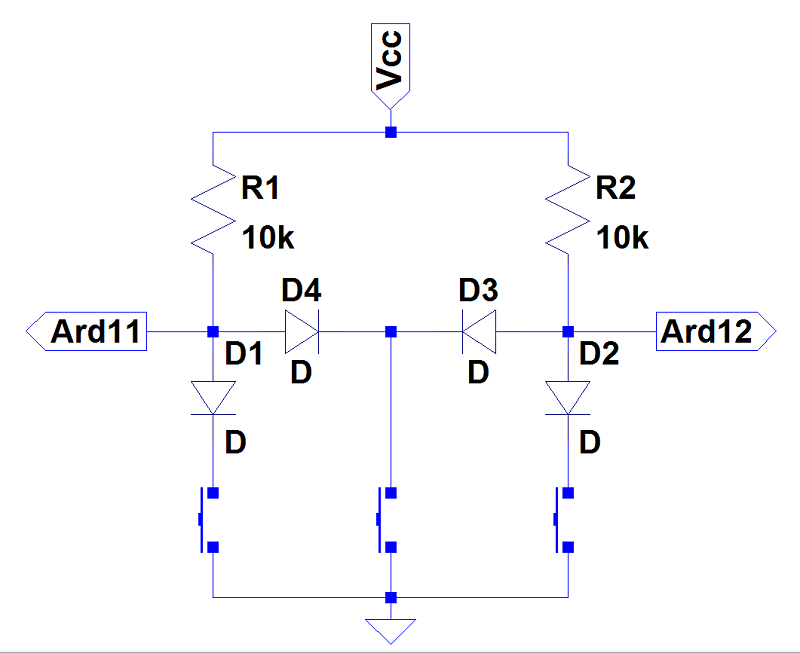
BP1 = choc à gauche (pin11)
BP2 = choc à droite (pin12)
BP3 = choc central (pin11 et pin12)
je pense à un montage de ce genre :

https://sites.google...lua/mnm/3bp.PNG
mais j'ai peur qu'une pression simultanée sur le BP3 et un autre BP balance trop d''intensité dans mon fragile arduino... ^^
C'est pourquoi j'ai pris l'initiative de vous demander une confirmation avant de commettre une erreur.
Merci d'avance.
EDIT: je me rends compte soudainement qu'une pression sur n'importe quel BP va faire pulluper sur toutes les résistances.. ça va pas.