
Bonjour à tous,
Dans le cadre d'un cours que j'ai depuis lundi: système mobile communicant, je suis "contraint" d'utiliser une arduino uno qu'il faut faire communiquer avec son téléphone via bluetooth et ce pour vendredi. ( arduino + shield bluetooth prêté par l'école )
Comme j'ai du materiel déjà prêt j'ai décidé de faire un petit robot téléopéré par le téléphone et renvoyant les donnés de capteurs sharp et d'un capteur de température.
Autant que ce soit utile, je partagerais ici mon projet.
En gros dessus il y aura deux capteur sharp, deux moteur CC un l293 un lm35,une carte d'alim 5V 3A et puis surement deux leds.
Si vous avez des idées que vous souhaitez que je mette en place en plus n'hésitez pas à en parler : si j'ai le matos et le temps et que je trouve ça intéressant j'ajouterais 
à bientôt!

#1

-
- Administrateur
-

- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 décembre 2013 - 07:17
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#2
-

- Membres
-
- 265 messages
Habitué
- Gender:Male
- Location:Lyon, France
- Interests:La robotique, l'électronique et la réalisation de projets concrets
Posté 17 décembre 2013 - 08:32
Pourquoi rajouterai tu pas caméra qui envoi les images à ton téléphone ? Cela pourrai augmenter un peu la difficulté xD
Cordialement
nvaste
Ps: C'est quoi ton école ? Elle à l'aire très bien.

#5
-
- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 décembre 2013 - 09:58
En gros pour vendredi je fais juste un petit robot tout simple ... je vais peut être ajouter des HCSR04 aussi dessus pourquoi pas ... voir des servo ... mais bon je verrais bien en fonction du temps que j'ai
Mon école : l'ESTIA.
Il y a des cours très intéressant là bas mais ça reste une école généraliste: on y fait un peu de tout. Après si tu veux approfondir faut le faire par tes propres moyens. Je fais quelque photo de temps en temps j'en posterais bientôt quelques une. Mais je vais surtout beaucoup travailler jeudi après midi. Donc là vous aurez plus d'info.
Je mettrais les code fais sur arduino mais je peux déjà vous dire que jutilise la librairie MeetAndroid.h dispo ici
petit code test que j'ai fais
/*
Receives Test Events from your phone.
After it gets a test message the led 13 will blink
for one second.
*/
#include <MeetAndroid.h>
MeetAndroid meetAndroid;
int onboardLed = 13;//ACTION : déclarer le numéro de la borne pour la LED
int buttonPin = 12;//ACTION : déclarer le numéro de la borde pour le bouton poussoir
int buttonVal = 0;
void setup()
{
// use the baud rate your bluetooth module is configured to
Serial.begin(9600); //ACTION : définir la bonne vitesse de transmission des données
// register callback functions, which will be called when an associated event occurs.
// - the first parameter is the name of your function (see below)
// - match the second parameter ('A', 'B', 'a', etc...) with the flag on your Android application
meetAndroid.registerFunction(receiveDataEvent, 'A');
pinMode(buttonPin, INPUT);
pinMode(onboardLed, OUTPUT);
digitalWrite(onboardLed, HIGH);
}
void loop()
{
meetAndroid.receive(); // you need to keep this in your loop() to receive events
buttonVal = digitalRead(buttonPin);//ACTION : lire l'état du bouton et stocker cette état dans une variable globale
if(buttonVal == LOW) //ACTION : réalser un test (if-else) simple : si le bouton est appuyé, envoyer la chaine "red"
{
meetAndroid.send("red");
digitalWrite(onboardLed, HIGH);
}
else // au téléphone, sinon, envoyer la chaine "green".
{
meetAndroid.send("green");
digitalWrite(onboardLed, LOW);
}
delay(1000);// ACTION : attendre environ 1s avant de rebloucler
}
/*
* This method is called constantly.
* note: flag is in this case 'A' and numOfValues is 0 (since test event doesn't send any data)
*/
void receiveDataEvent(byte flag, byte numOfValues)
{
flushLed(300);
flushLed(300);
meetAndroid.send("Message reçu");
}
void flushLed(int time)
{
digitalWrite(onboardLed, LOW);
delay(time);
digitalWrite(onboardLed, HIGH);
delay(time);
}
plus tard je donnerais le code pour téléphone.
Si vous avez des idées qui collent avec ce projet et que je peux développer pour vous ( si ça me prend pas trop de temps ) j'en profiterais x) car je ne compte pas redeveloper sur arduino par la suite avant d'être de nouveau contraint plus tard en 2014 ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#6
-
- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 19 décembre 2013 - 02:27
Le but l'imprimer et la souder ce soir.
Ce qui est prévu pour le moment : Une prise batterie avec régulataur 5V 3A, 1 L293 Des prise pour servo au niveau des entrées analogiques pour y brancher des capteurs comme des sharps , deux prise HCSR04, et je sais pas encore trop pour le reste ça dépendra de la place restante et des autre idées que je rajouterais entre temps.
Si vous avez des suggestion c'est maintenant
à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#8
-
- Membres
-
- 265 messages
Habitué
- Gender:Male
- Location:Lyon, France
- Interests:La robotique, l'électronique et la réalisation de projets concrets
Posté 19 décembre 2013 - 06:26
#9
-
- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 décembre 2013 - 09:18
Donc déjà pour commencer :
J'ai fais un shield qui se pose directement sur la arduino. Qui contient exactement :
Un prise pour une batterie et une prise pour un interrupteur générale associé.
Ensuite il y a une partie alim 5V 3A basé sur l'utilisation du LM2576 en non ajustable( + 2 condensateurs, une bobine , une diode )
La tension de la batterie rentre directement dans le Vin de la arduino mais le 5V disponible sur le shield ne provient pas de la arduino.
Ensuite il y a dessus deux prise pour capteur HCSR04 avec trig en pin digital 12 echo en 13 pour le premier capteur et trig en 8 et echo en 7 pour le second.
Des prise pour servo au niveau des pin analogique et des pins digital 3 et 11 et ces deux derniers sont aussi associés à des leds.
Le l293 est relié à la pin 4 pour l'enable des 2 pont en H , et les pin 3 5 6 et 9 sont reliés aux commandes du L293 et les prise pour le relier au moteur
Je n'ai rien mis sur la pin 2 ni sur RX et TX de l'arduino qui est utilisé par le shield que j'utilise.
il y a un pont diviseur de tension qui est relié à la batterie et qu'on peut choisir de connecter à la pin analogique 0 via jumpeur pour avoir un retour de la tension de la batterie.
Biensur j'ai fais ça vite fais en étant un peu pris par le temps donc il y a encore deux trois trucs à revoir mais tout fonctionne parfaitement ^^. Si il y en a qui sont intéressé je peux faire une V2
Au final sur le robot j'ai monté une tourelle pan tilt équipée d'un capteur sharp que j'ai branché sur une des prise pour servo sur les pin analogique, les deux capteurs HCSR04 mesurant toujours la distance devant et derrière le robot.
Pour le déplacement de tout ça c'est l'appli sur le téléphone qui le gère via le blutooth, l'oriantation du téléphone gérant le déplacement de la base mobile et 4 boutons gérant le déplacement de la tourelles. Un retour des capteurs s'effectuant aussi sur le téléphone.
Le code de l'ensemble ainsi que le châssis est resté très simple par manque de temps ( car oui il s'agissait d'un projet scolaire x)) mais bon j'ai bien entendu été un peu au delà de ce qui était réellement attendu mais ça c'est pas grave ^^
Pour ceux qui travaillent sur le robot de robots maker j'ai mis pas mal de truc sur la drop box ça peut peut être donner des idées de ce que vous voulez mettre dessus.
En tout cas si vous avez des questions ou si vous voulez plus d'info n'hésitez pas.
Je reviendrais sûrement poster une image du shield et une vidéo du robot en fonctionnement.
à bientôt !
- Melmet aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 23 décembre 2013 - 11:08
Bravo a toi, je vais regarder ca de suiteBon le projet à été fini dans les temps maintenant c'est le moment de partager un peu ce que j'ai fais x)
Donc déjà pour commencer :
J'ai fais un shield qui se pose directement sur la arduino. Qui contient exactement :
Un prise pour une batterie et une prise pour un interrupteur générale associé.
Ensuite il y a une partie alim 5V 3A basé sur l'utilisation du LM2576 en non ajustable( + 2 condensateurs, une bobine , une diode )
La tension de la batterie rentre directement dans le Vin de la arduino mais le 5V disponible sur le shield ne provient pas de la arduino.
Ensuite il y a dessus deux prise pour capteur HCSR04 avec trig en pin digital 12 echo en 13 pour le premier capteur et trig en 8 et echo en 7 pour le second.
Des prise pour servo au niveau des pin analogique et des pins digital 3 et 11 et ces deux derniers sont aussi associés à des leds.
Le l293 est relié à la pin 4 pour l'enable des 2 pont en H , et les pin 3 5 6 et 9 sont reliés aux commandes du L293 et les prise pour le relier au moteur
Je n'ai rien mis sur la pin 2 ni sur RX et TX de l'arduino qui est utilisé par le shield que j'utilise.
il y a un pont diviseur de tension qui est relié à la batterie et qu'on peut choisir de connecter à la pin analogique 0 via jumpeur pour avoir un retour de la tension de la batterie.
Biensur j'ai fais ça vite fais en étant un peu pris par le temps donc il y a encore deux trois trucs à revoir mais tout fonctionne parfaitement ^^. Si il y en a qui sont intéressé je peux faire une V2
Au final sur le robot j'ai monté une tourelle pan tilt équipée d'un capteur sharp que j'ai branché sur une des prise pour servo sur les pin analogique, les deux capteurs HCSR04 mesurant toujours la distance devant et derrière le robot.
Pour le déplacement de tout ça c'est l'appli sur le téléphone qui le gère via le blutooth, l'oriantation du téléphone gérant le déplacement de la base mobile et 4 boutons gérant le déplacement de la tourelles. Un retour des capteurs s'effectuant aussi sur le téléphone.
Le code de l'ensemble ainsi que le châssis est resté très simple par manque de temps ( car oui il s'agissait d'un projet scolaire x)) mais bon j'ai bien entendu été un peu au delà de ce qui était réellement attendu mais ça c'est pas grave ^^
Pour ceux qui travaillent sur le robot de robots maker j'ai mis pas mal de truc sur la drop box ça peut peut être donner des idées de ce que vous voulez mettre dessus.
En tout cas si vous avez des questions ou si vous voulez plus d'info n'hésitez pas.
Je reviendrais sûrement poster une image du shield et une vidéo du robot en fonctionnement.
à bientôt !


#12
-
- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 février 2014 - 02:04
Oui j'ai réalisé une application android et oui j'ai fais une vidéo.
Je n'ai par contre pas retravaillé dessus depuis la fin du projet, donc l'interface n'est vraiment pas top et beaucoup de chose peuvent largement être améliorée. Délicat de faire plus en seulement 1 semaine sachant qu'il y avait aussi d'autres cours à côté ...
Bref je vais poster quelques images ici ( si je ne le fais pas avant lundi prochain ne pas hésiter à redemander ici ^^ je lis toujours tout les nouveaux posts
mais parfois avec quelques jours de décalage =) )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#14
-
- Administrateur
-
- 10â¯303 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 février 2014 - 08:46
Salut mike,
Désolé de te redemander mais est il toujours possible que tu mettes quelques images ou une video ?
Merci!!
Salut
Tu as bien fais de redemander
Voici un vue globale des échanges arduino/mobile.
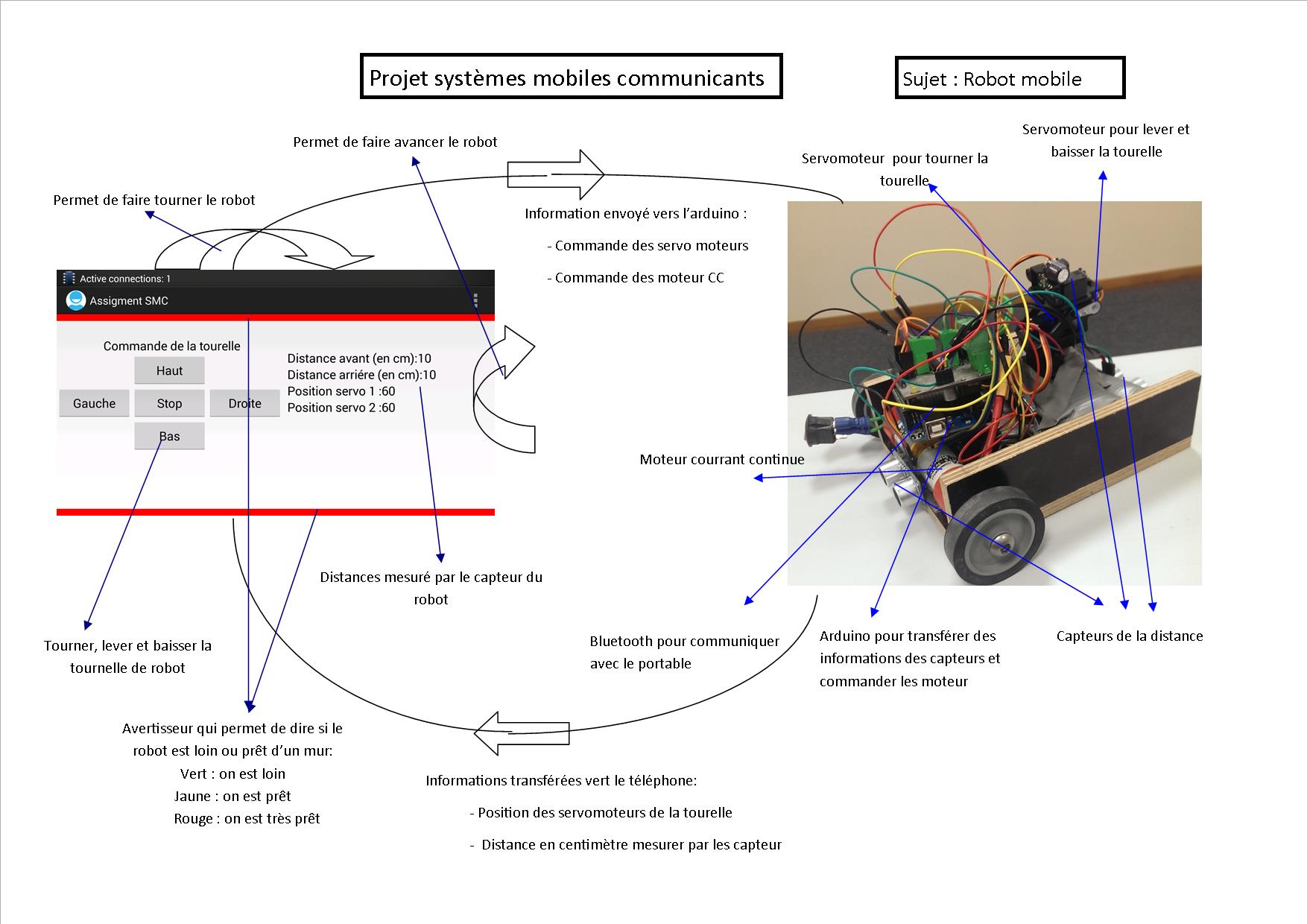
Malheureusement je n'ai pas de photo où on voit mieux le robot =/ et il a malheureusement été démonté.
Par contre si tu as des questions j'y réponds avec plaisir.
liste du matériel qui était présent sur le robot :
2 HCSR04
1 capteur sharp de portée entre 20 cm à 1m ( monté sur la tourelle )
2 servo moteur 9g ( pour faire une tourelle pan tilt)
2 moto reducteur
1 paire de roue home made ( rouleau d'imprimante)
1 batterie lipo 3S 2200mah + sac ignifuge
1 arduino
1 shield blutooth
1 carte d'alimentation + carte moteur home made compatible shield arduino
des fils
du bois
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




