

Je rouvre un nouveau sujet étant donné que je suspends mon ancien projet.
Je vais donc partir sur une base roulante deux roues motrices, composé d'un chassis en plexiglass.
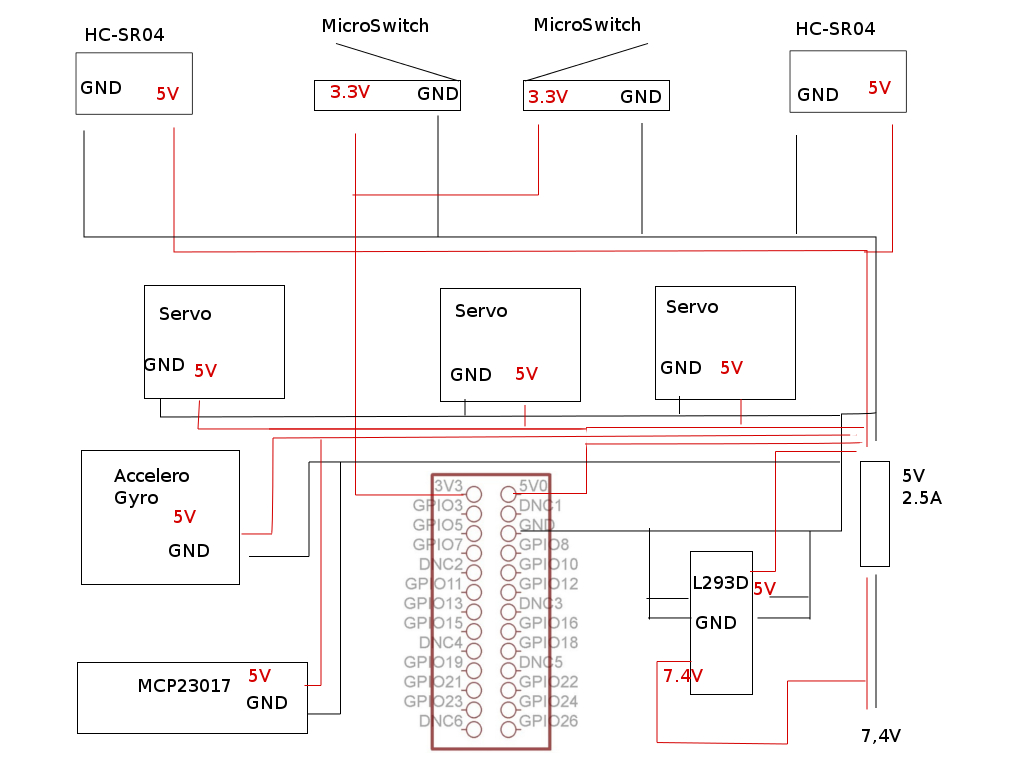
Le but de ce robot-ci sera de pouvoir tester plusieurs choses, tout d'abord d'arriver à le rendre autonome (capteur ultrasons, microswitch, ...), de pouvoir m'exercer à OpenCV (j'ai déjà la caméra), me lancer dans les réseaux de neurones, et j'ai rajouté un module accelero-gyro pour pouvoir mettre en pratique des maths.
J'ai notamment rajouter des carte de prototypages, pour commencer doucement à m'exercer à souder et faire de petits montages.
Une bonne partie des éléments sont déjà choisis, si j'oublie quelque chose ou que ça ne convient pas, n'hésitez pas à faire signe. ^^
 Robot1.pdf 83,55 Ko
338 téléchargement(s)
Robot1.pdf 83,55 Ko
338 téléchargement(s)J'ai tout de même quelques questions,
Est-ce que ce type de plaque de prototypage est suffitante?
http://www.kibuck.com/carte-de-prototypage-economique-7-9cm.html
Auriez-vous des composants électroniques à conseiller pour débuter?
Est-ce qu'un switch unipolaire peut être utilisé comme interrupteur pour la Rpi (voir pour toute la base roulante) ?
http://www.kibuck.com/switch-a-bascule-unipolaire.html
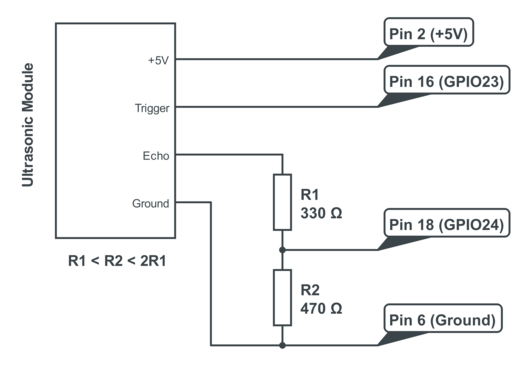
Est-ce qu'il suffit d'une résistance de tirage pour un switch? (ou de deux résistances, comme les capteurs à ultrasons)
http://www.kibuck.com/micro-switch-miniature.html
Quand on fait le calcul d'un pont diviseur de tension, via des résistances de 330 et 470 ohm, on n'obtient pas 3,3V. Est-ce négligeable?
[ V = V_ini * R2 / (R2 + R1) => = 5 * (470 / (470 + 330)) = 2.9375 ]
Quel régulateur de tension choisir ? Je ne sais pas si les deux sont corrects, ou s'il y en a un à privilégier... ^^'
http://www.kibuck.com/module-dc-dc-1-30v-2-5a-step-down.html
http://www.kibuck.com/module-d-alimentation-5v.html
Quel système de contrôle moteur choisir ?
http://www.kibuck.com/controleur-moteur-l298.html
http://www.kibuck.com/l293-double-pont-en-h-0-6a.html
Je ne sais pas si le L293D pourrait convenir à mon cas, en les mettant par exemple en parallèle. (même si cette solution peu propre m'embête un peu)
Les moteurs sont les suivant : http://www.hobbyking.com/hobbyking/store/__26254__Geared_Motor_w_90_Deg_Shaft_2Pcs_Bag_.html
ayant peu d'information sur cette page, j'ai un peu cherché, et il semblerait qu'il s'agit de ces moteurs-ci http://www.tohobby.com/en/smart-car-tt-motor-wheel-kit-with-dc-geared-motor-and-wheel.html avec une réduction de 1:48
Et une dernière question, ma batterie LiPoly semble avec une sortie avoir des connecteurs bananes http://www.hobbyking.com/hobbyking/store/%5F%5F8578%5F%5FZIPPY%5FFlightmax%5F5000mAh%5F2S1P%5F20C.html
Est-ce que je peux tout simplement utiliser ce type d'embase http://www.hobbyking.com/hobbyking/store/%5F%5F31922%5F%5FFemale%5F4mm%5FBanana%5FElectrical%5FJack%5FPair.html, pour faire une connexion un peu plus propre qu'en coupant simplement dans les fils?
Normalement après ça ça devrait être bon
 />/>
/>/>Le prix du robot étant d'à peu près 65euros, je ferai le calcul une fois sûre des composants à prendre.
Merci de votre lecture.
/>/>



















{kind=link}