 Posté par
Posté par
/*Programme de pilotage d'un moteur pap via arduino, 2 switchs et un driver A4998*/
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
// Décalaration des variables
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
// PINS du moteur 1
#define enablePin1 8 // Activation du driver (0=> activé)
#define dirPin1 4 // sens de rotation du moteur (0=> sens horaire)
#define stepPin1 5 // commande de rotation
// PINS des boutons poussoirs
#define BP1 2 // bouton fin de course
#define BP2 3 // bouton poussoir jaune => haut
// Variables générales
#define stepsPerRevolution 400 // nombre de pas du moteur (ici un JK42HM48-1684 => copie NEMA17)
bool fin = false;
bool sens;
bool mvt = false;
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
// Fonctions secondaires ou interruptions
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
void fin_de_course () {
// fin de course détecter on arrête le moteur
fin = true;
}
void haut () {
// appui sur le bouton poussoir de déplacement vers le haut, on arrête la rotation du moteur en relachant le bouton
sens = true;
mvt = !mvt;
}
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
// Initialisation
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
void setup() {
// Déclaration des pins en tant que sortie:
pinMode(enablePin1, OUTPUT);
pinMode(stepPin1, OUTPUT);
pinMode(dirPin1, OUTPUT);
// Initialisation de l'état des différents pins
digitalWrite(enablePin1, HIGH); // Drivers non-activé
// Déclaration de la fonction d'interruption du capteur de fin de course
attachInterrupt(0, fin_de_course, RISING);
attachInterrupt(1, haut, CHANGE);
}
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
// Programme principal : on pilote le moteur grâce aux différents boutons poussoirs
/*-------------------------------------------------------------------------------------------------------------------------------------------------------------------------*/
void loop() {
if (mvt == true && fin == false){
digitalWrite(enablePin1,LOW);
digitalWrite(dirPin1,sens);
// On avance d'un pas (! attention au réglage de MS1,MS2 et MS3 !)
digitalWrite(stepPin1, HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin1, LOW);
delayMicroseconds(1000);
}
else {
digitalWrite(enablePin1,HIGH);
}
}
Avec ce code je commande la mise en rotation du moteur par une pression sur un bouton poussoir, le moteur est à l'arrêt si le bouton poussoir n'est pas pressé ou si le capteur de fin de course est activé.









 (24V si je ne me trompe pas). J'étais tellement content quand je les ai recupérés mais aujourd'hui je me dis que je les utiliserais jamais
(24V si je ne me trompe pas). J'étais tellement content quand je les ai recupérés mais aujourd'hui je me dis que je les utiliserais jamais  .
.
 .
.  !!!
!!!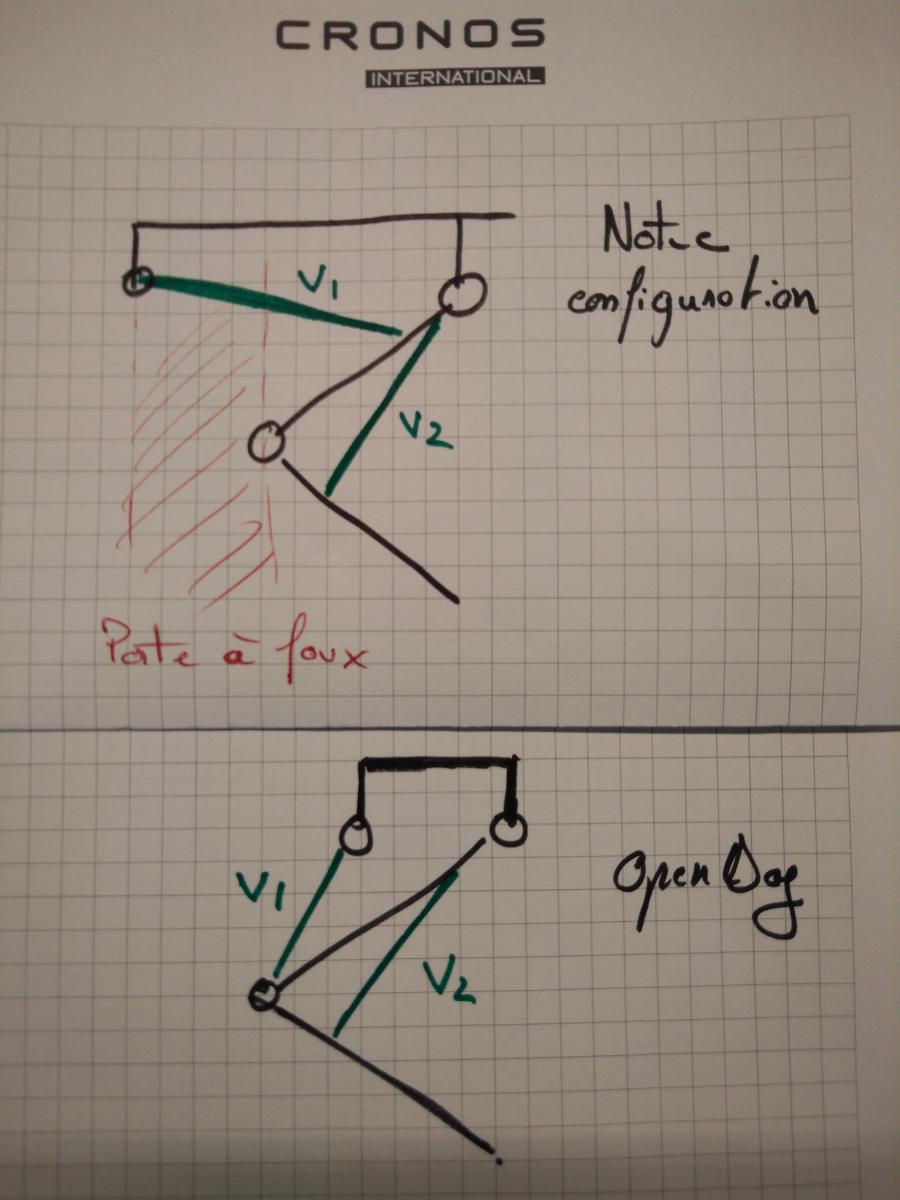
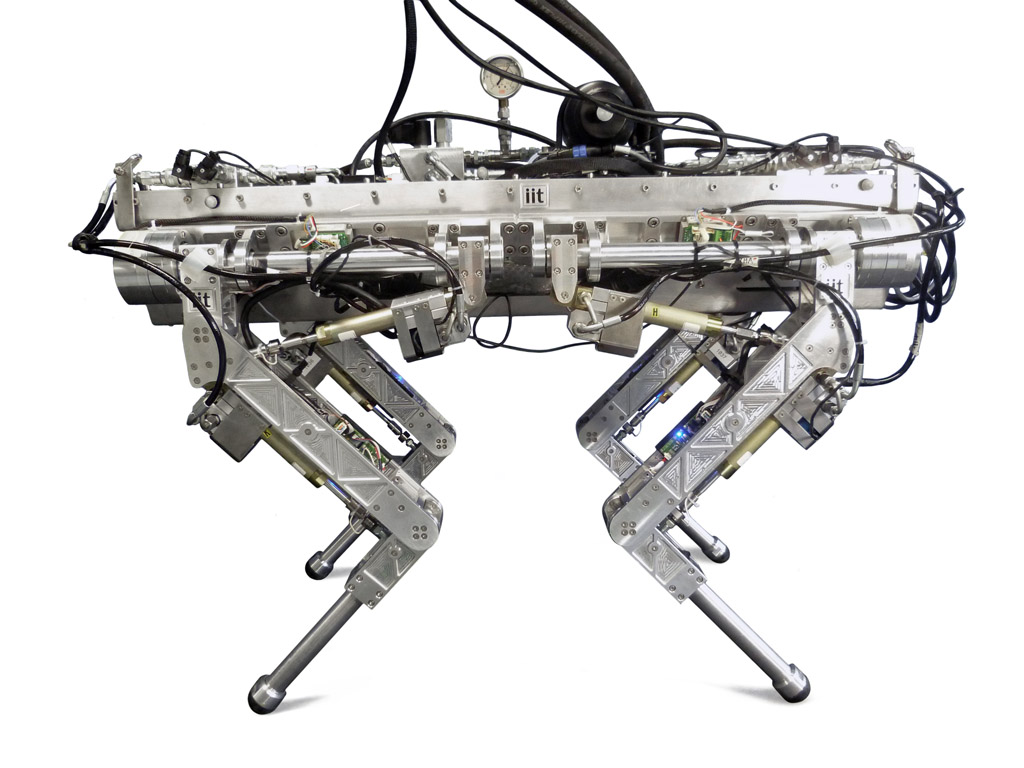
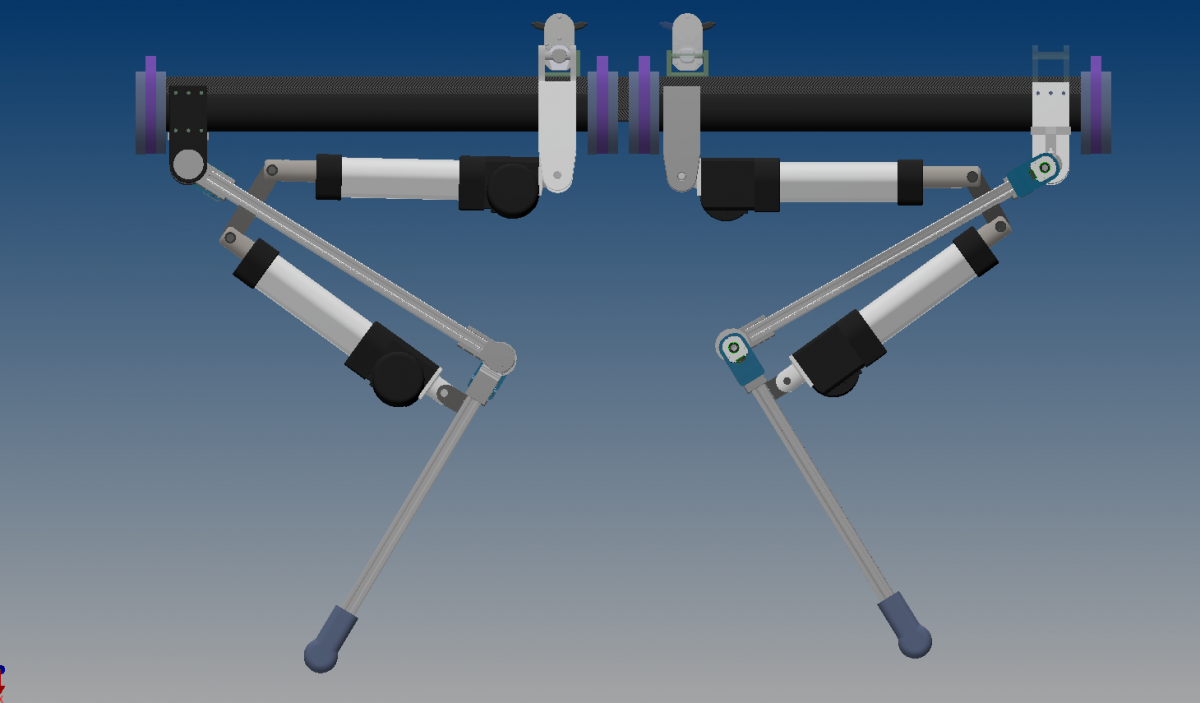
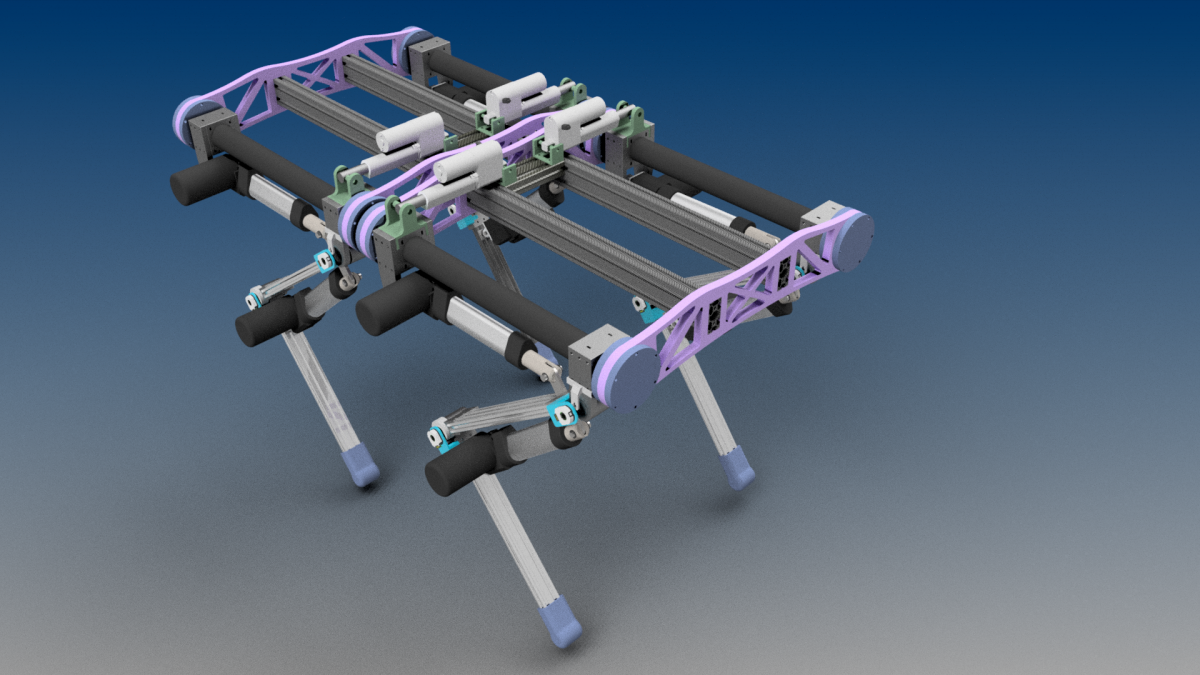
 Je vais étudier un peu cette configuation par curiosité.
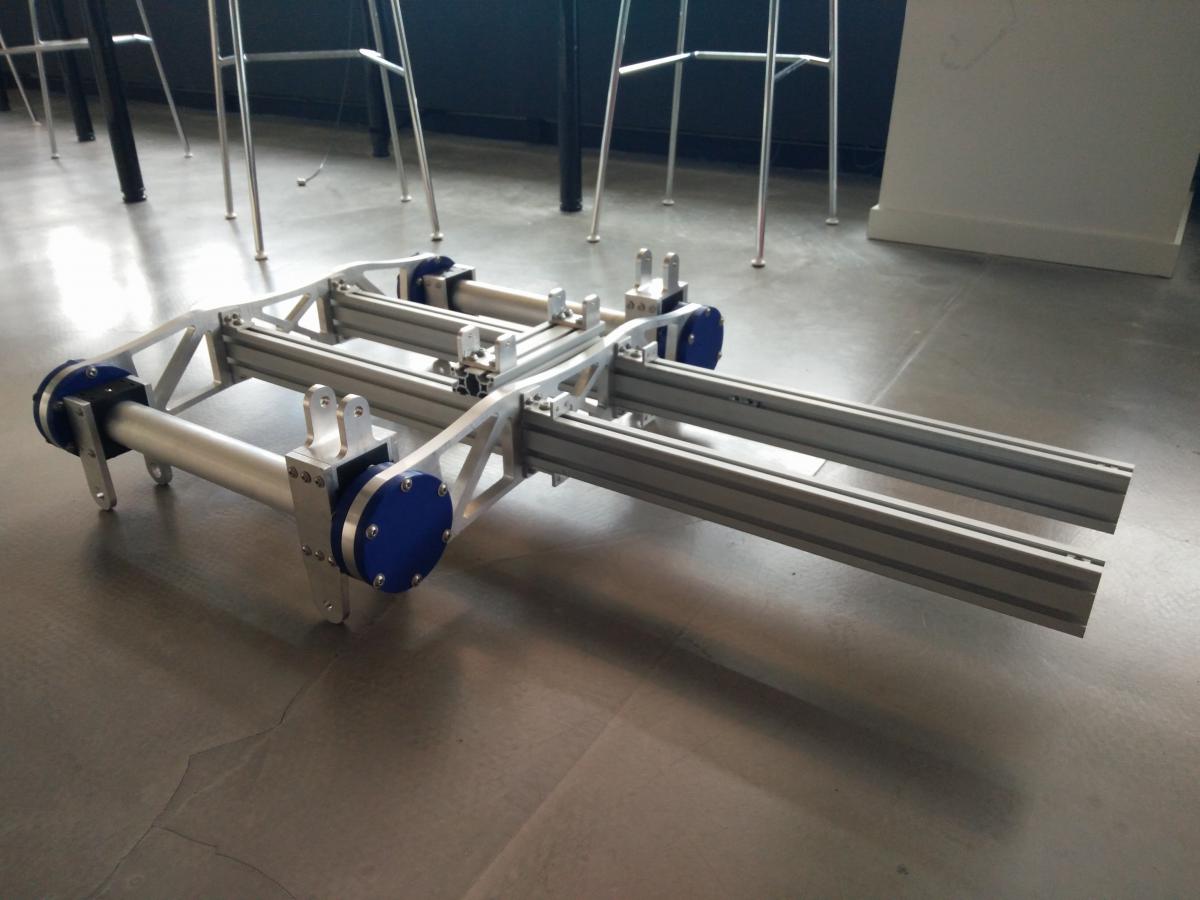
Je vais étudier un peu cette configuation par curiosité. . On avait déjà remarqué que le porte à faux était très important mais théoriquement il nous est possible d'inverser le sens des pattes arrières afin d'avoir une structure en "X" qui serait beaucoup plus équilibrée (comme tu nous le suggères). L'équipe chargée du soft aura juste un peu plus de travail
. On avait déjà remarqué que le porte à faux était très important mais théoriquement il nous est possible d'inverser le sens des pattes arrières afin d'avoir une structure en "X" qui serait beaucoup plus équilibrée (comme tu nous le suggères). L'équipe chargée du soft aura juste un peu plus de travail  .
.


 )
)



