Posté par
Posté par
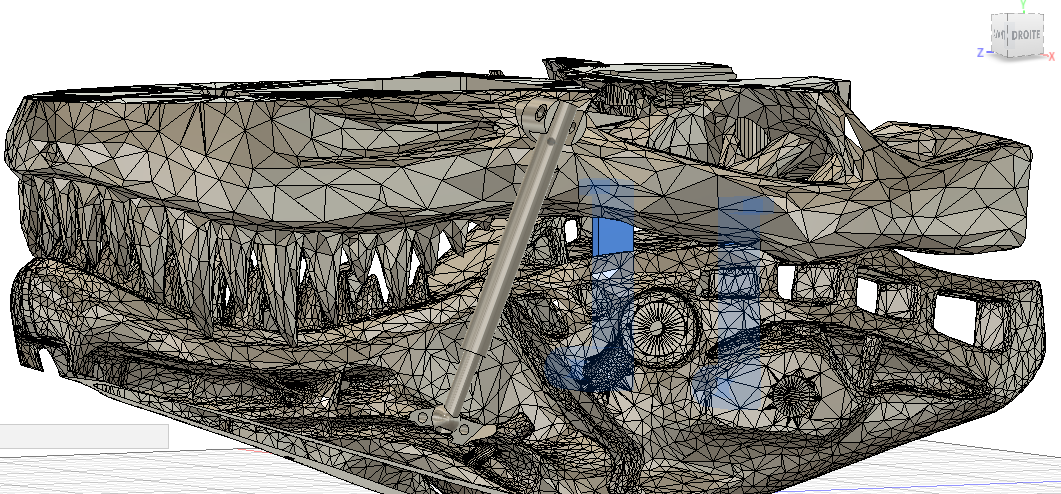
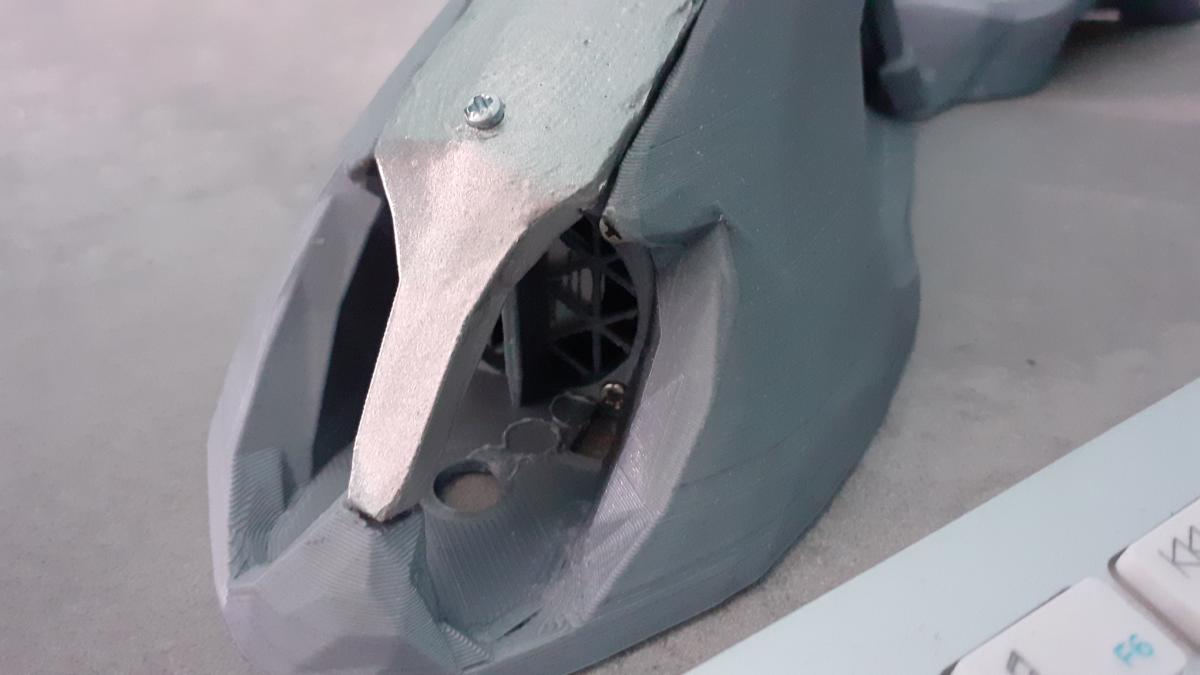
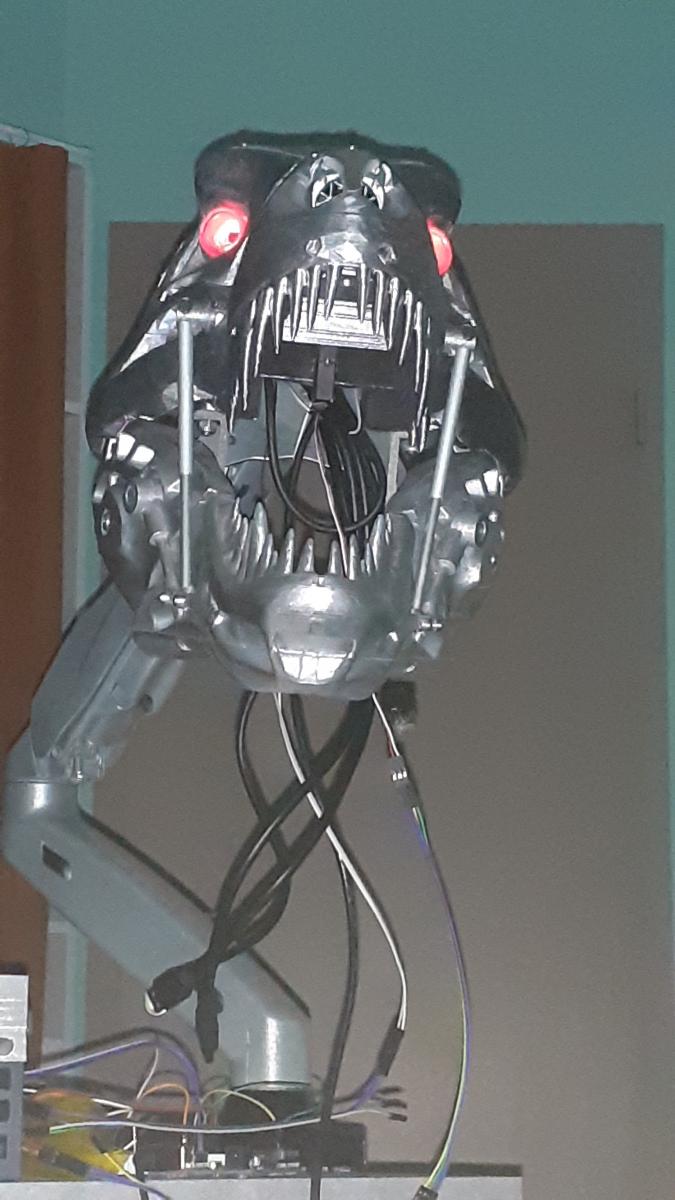
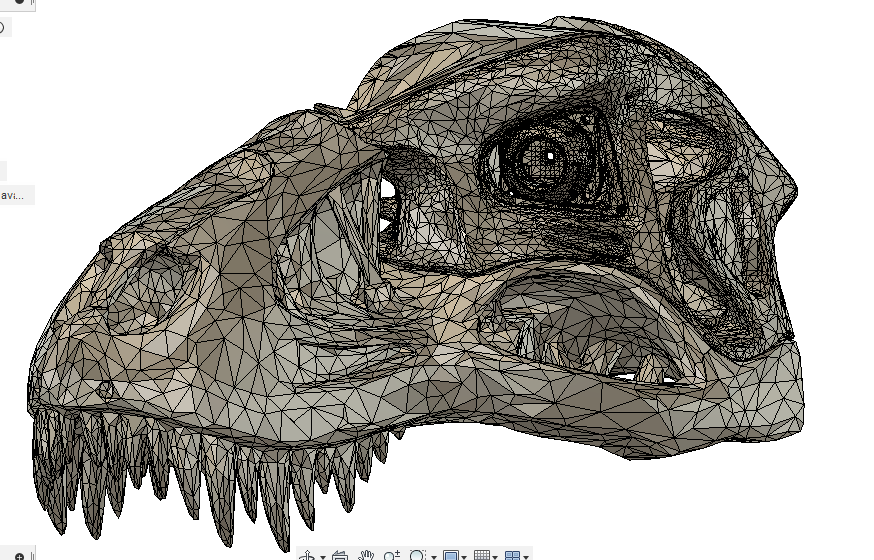
J'ai bien avancé sur mon Terminatosaurus Rex.

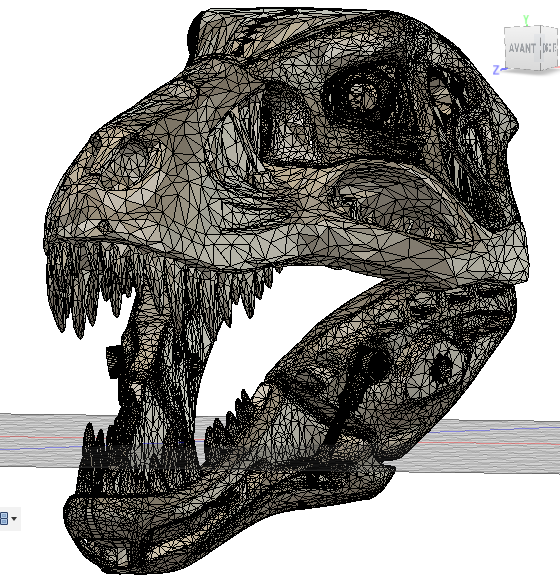
Donc comme dit plus haut, cette tête me sert de base d'apprentissage (modélisation, impression 3D, programmation).
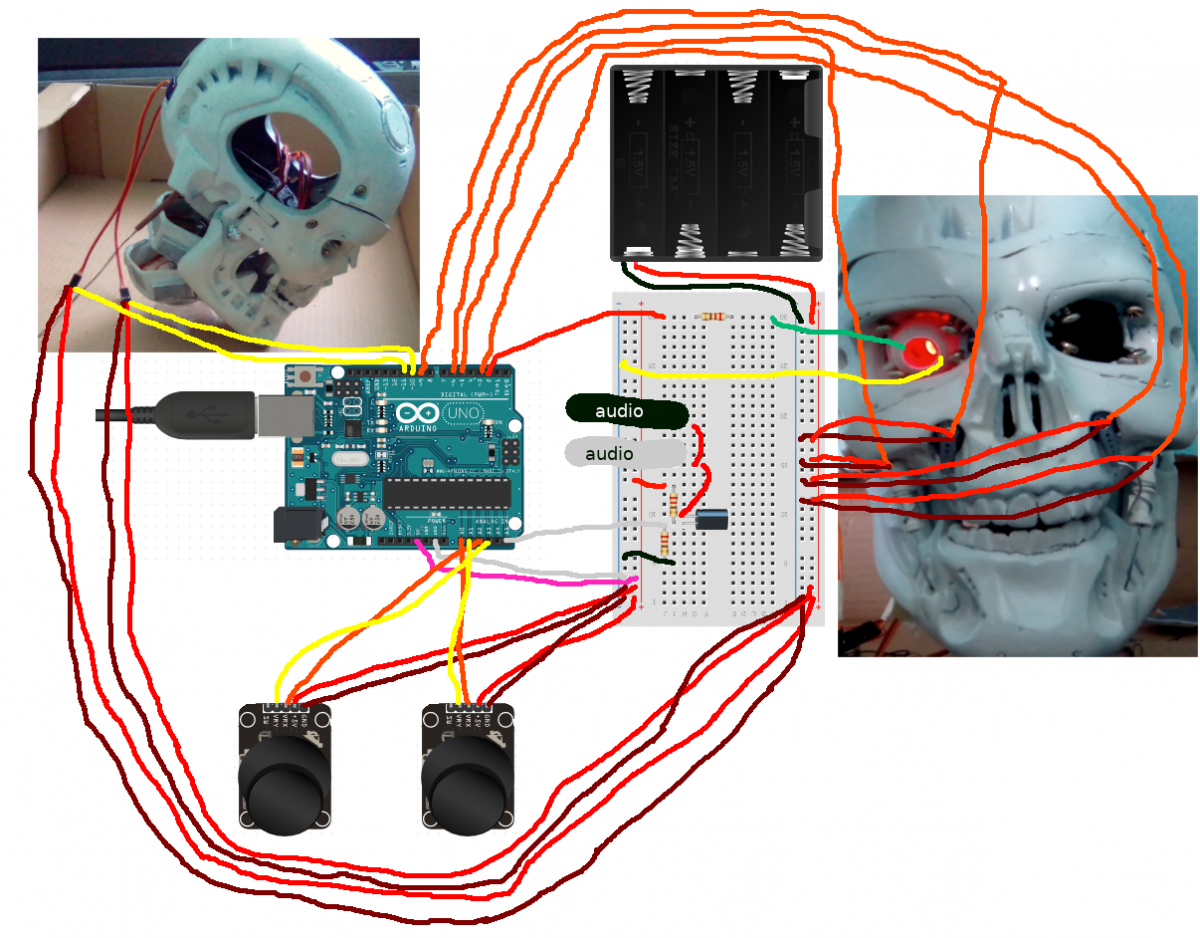
Les fonctions seront simples :
- Suivre quelqu'un avec les mouvements de tête
- Grogner
- Hurler
- Radio-réveil (avec le T-Rex qui hurle dans les oreilles de bon matin)
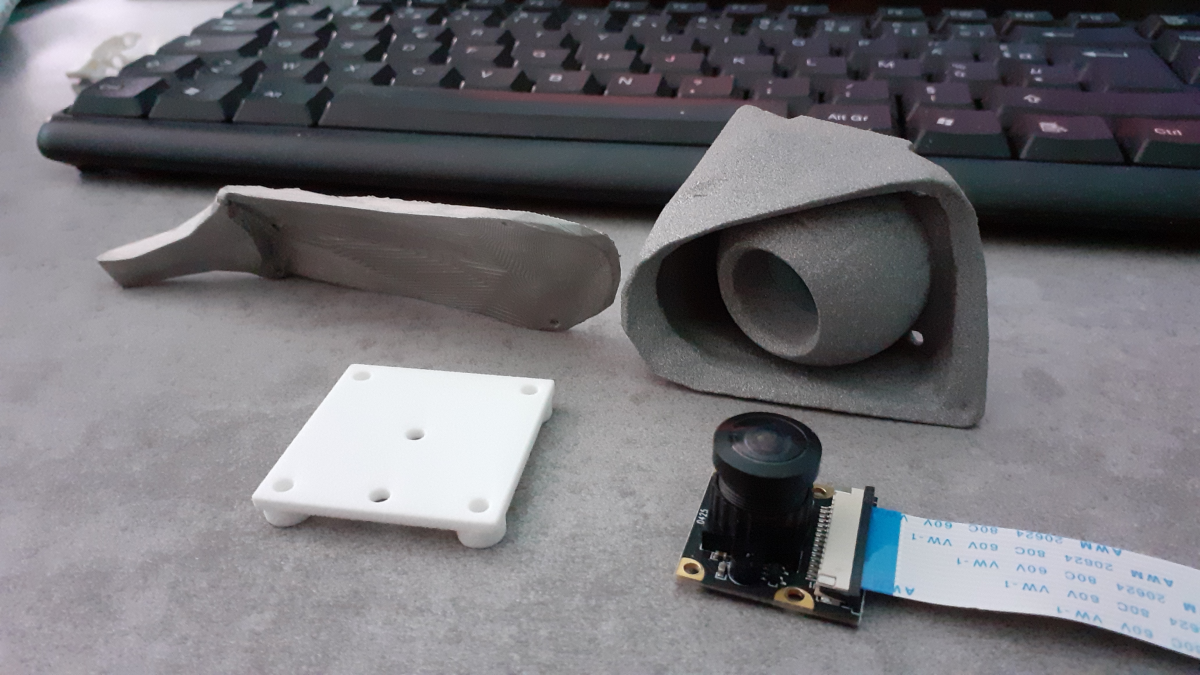
Je ne suis pas sûr de pouvoir avoir une vue stéréoscopique et les yeux sont fixes.
Je pense aussi réaliser une version plus petite comme simple radio-réveil.