d'accord , et si je prends celui ci c'est mieux non ? par rapport a celui ci (moteur que je pensais acheter au debut) ?
RPM sans charge : 140
Couple darrêt : 65 oz-po (4.7 kg-cm)
Courant darrêt : 1600 mA
Réduction : 210:1
Contenu de dydyouaki
Il y a 772 élément(s) pour dydyouaki (recherche limitée depuis 04-juin 13)
Par type de contenu
Voir pour ce membre
#55065 robot suiveur de ligne arduino
 Posté par
sur 03 avril 2013 - 01:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 03 avril 2013 - 01:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
#55060 robot suiveur de ligne arduino
Posté par
sur 03 avril 2013 - 11:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc est ce qu'a ton avis je devrais prendre un moteur different ?
et pour l'interface je prendrais un L298 , ca me fais gagner de la place comme ca.
et pour l'interface je prendrais un L298 , ca me fais gagner de la place comme ca.
#55056 robot suiveur de ligne arduino
Posté par
sur 03 avril 2013 - 08:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
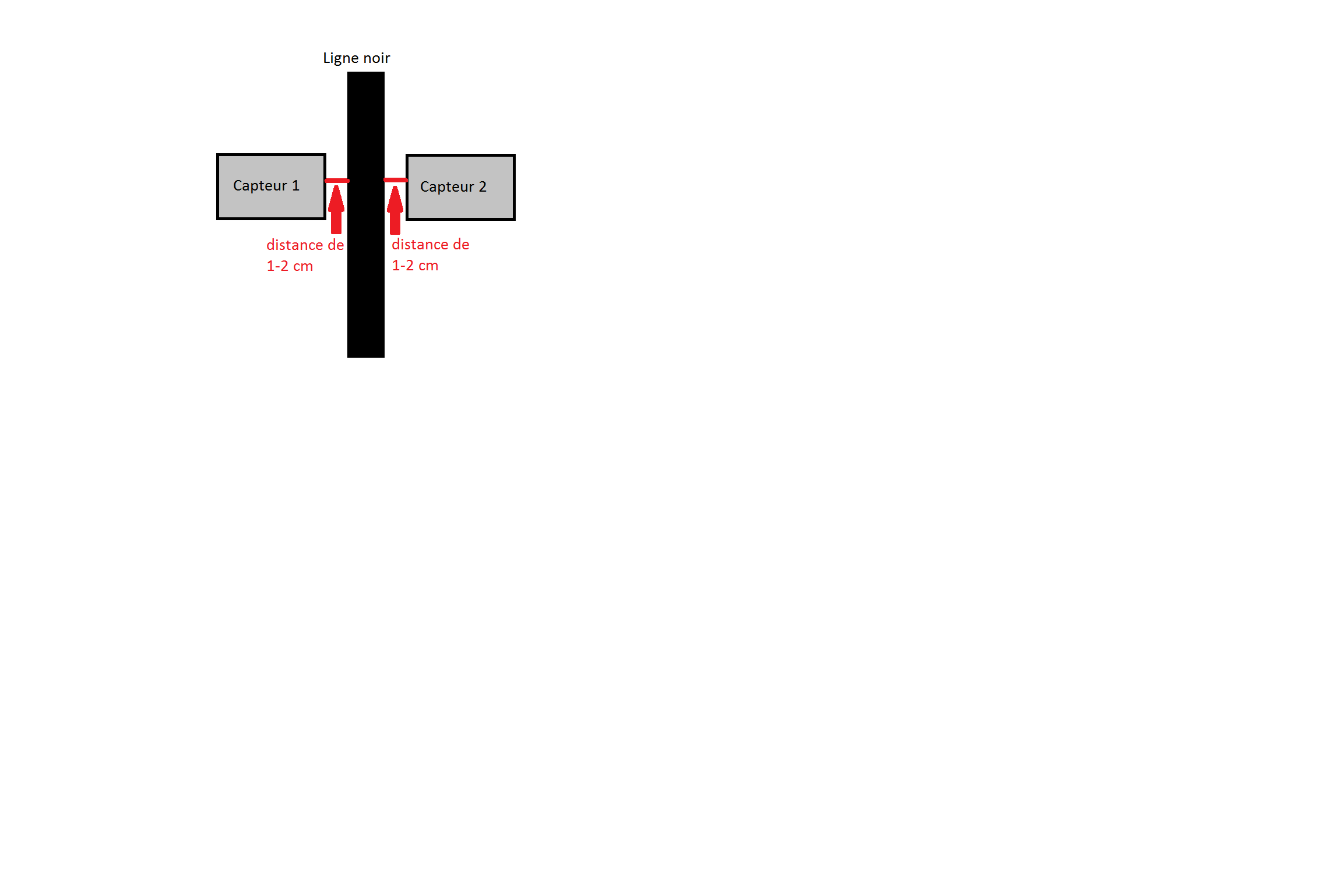
D'accord j'ai compris.
Bon eh bien je vais utiliser deux capteur et les placer comme sur la photo ci-dessous jointe.
Donc je vais essayer de passer commande des que possible. pour le châssis je pense utiliser soit une planche en bois (bois pas très lourd) soit du plexiglas. Le châssis sera petit.
Les capteurs il faut que je les commande , ainsi que les moteurs et les roues. Au fait que pensez vous des moteurs ? je sais bien que vous c'est un choix un peu compliquer de choisir des moteurs et que c'est par rapport au poids de mon robot. Mais sachant que dessus il y aura une mega2560 , une mini plaque d'essais , 2 capteurs(ca ne compte pas c'est très léger)et 2 piles 9V (une pour alimenter ma carte Arduino , l'autre pour mes moteurs) pensez vous que ces moteurs sont capables de supporter tout ca (mon avis est oui , mais je préfère demander).
Caractéristiques du moteurs :
Tension nominale : 6 V
RPM sans charge : 100
Couple d'arrêt : 90 oz-po (6,5 kg-cm)
Courant d'arrêt : 1600 mA
Réduction : 298:1
Merci de votre aide et de vos conseille.
Bon eh bien je vais utiliser deux capteur et les placer comme sur la photo ci-dessous jointe.
Donc je vais essayer de passer commande des que possible. pour le châssis je pense utiliser soit une planche en bois (bois pas très lourd) soit du plexiglas. Le châssis sera petit.
Les capteurs il faut que je les commande , ainsi que les moteurs et les roues. Au fait que pensez vous des moteurs ? je sais bien que vous c'est un choix un peu compliquer de choisir des moteurs et que c'est par rapport au poids de mon robot. Mais sachant que dessus il y aura une mega2560 , une mini plaque d'essais , 2 capteurs(ca ne compte pas c'est très léger)et 2 piles 9V (une pour alimenter ma carte Arduino , l'autre pour mes moteurs) pensez vous que ces moteurs sont capables de supporter tout ca (mon avis est oui , mais je préfère demander).
Caractéristiques du moteurs :
Tension nominale : 6 V
RPM sans charge : 100
Couple d'arrêt : 90 oz-po (6,5 kg-cm)
Courant d'arrêt : 1600 mA
Réduction : 298:1
Merci de votre aide et de vos conseille.
Image(s) jointe(s)
#55070 robot suiveur de ligne arduino
Posté par
sur 03 avril 2013 - 04:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc je peux utiliser ce moteur avec les roues pololu 32x7mm - lien
le robot pourra aller normalement (ni trop lent , ni trop rapide) et donc éviter que le robot zigzag de partout.
le robot pourra aller normalement (ni trop lent , ni trop rapide) et donc éviter que le robot zigzag de partout.
#55076 robot suiveur de ligne arduino
Posté par
sur 03 avril 2013 - 07:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
ce contrôleur de moteurs a l'air de correspondre a mes moteurs (chacun 1600mA)
Contrôle de la vitesse : proportionnelle 8 bits
Sortie max. par canal : 2 A
Tension d'entrée sur les bornes à vis : 6 V-15 V
Contrôle de la vitesse : proportionnelle 8 bits
Sortie max. par canal : 2 A
Tension d'entrée sur les bornes à vis : 6 V-15 V
#55111 robot suiveur de ligne arduino
Posté par
sur 04 avril 2013 - 03:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bon le total de mes achat fera 105 euro dans deux semaine je pourrais payer avec ma carte bleu , car la je ne peu pas faire de carte  />
/>
Donc je commanderais :
2 Micro moteurs réducteurs 210:1
2 fixations pour moteurs Pololu
2 Roues 32x7 mm Pololu
2 Capteurs suiveur de ligne DFRobot
1 Carte Ardumoto - controleur de moteur
2 Borne à Vis 3.5mm - 2 pins
2 Connecteurs pour Blindages Arduino - 6 pins
2 Connecteurs pour Blindages Arduino - 8 pins
Je possède une Arduino Mega2560 - la carte Ardumoto est compatible pour cette carte ??
Sinon je vais continuez a coder , comme ca le temps de commander et de recevoir , j'aurais deja fais la plus grosse partie de la programmation.
/> Donc je commanderais :
2 Micro moteurs réducteurs 210:1
2 fixations pour moteurs Pololu
2 Roues 32x7 mm Pololu
2 Capteurs suiveur de ligne DFRobot
1 Carte Ardumoto - controleur de moteur
2 Borne à Vis 3.5mm - 2 pins
2 Connecteurs pour Blindages Arduino - 6 pins
2 Connecteurs pour Blindages Arduino - 8 pins
Je possède une Arduino Mega2560 - la carte Ardumoto est compatible pour cette carte ??
Sinon je vais continuez a coder , comme ca le temps de commander et de recevoir , j'aurais deja fais la plus grosse partie de la programmation.
#55110 robot suiveur de ligne arduino
Posté par
sur 04 avril 2013 - 03:01
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui tu peux =) en plus cela t'entrainera pour la soudure =) ( mais visiblement il est un peu moins pratique à utiliser ... )
pourquoi ca ?
#55103 robot suiveur de ligne arduino
Posté par
sur 04 avril 2013 - 02:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc je peux aussi utiliser celui ci , car il est base sur un l298 , non ?! (celui ci est disponible dans mon pays)
#55052 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 11:47
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ok , je m'attendais a cette avis - pas beaucoup de stabilité 
et si je veux obtenir plus de stabilité je devrais mettre combien de capteurs a votre avis ?
En tout cas Merci enormement
et si je veux obtenir plus de stabilité je devrais mettre combien de capteurs a votre avis ?
En tout cas Merci enormement
#55062 robot suiveur de ligne arduino
Posté par
sur 03 avril 2013 - 01:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui mais je ne l'ai pas finis. je devais utiliser des servomoteur a 360* assez puissants. Mais le projet est en pause , quelque petit problème niveaux programme.
Sinon pour le suiveur de ligne vaux mieux prendre des moteurs moins rapide mais plus réducté , mais comment savoir quel est le taux de réducté du moteur ?
Sinon pour le suiveur de ligne vaux mieux prendre des moteurs moins rapide mais plus réducté , mais comment savoir quel est le taux de réducté du moteur ?
#55048 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 06:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
Non il n'as pas technologie dans son école  />/>/>
/>/>/>
Oui Mike118 je connais bien ce site , mais le petit de 5 ans a un père qui est très a l'aise avec un fer a souder le père soude plus vite que son ombre ! />/>/> non je rigole.
/>/>/> non je rigole.
Même moi des fois je rate des soudures , je ne peux pas lui apprendre a souder si moi je commence a apprendre/>/>
EDIT: je suis en train de réaliser sur SolidWork l'aperçu de mon robot avec les tailles réelles. Des que je finis , je les publie.
/>/>/>Oui Mike118 je connais bien ce site , mais le petit de 5 ans a un père qui est très a l'aise avec un fer a souder le père soude plus vite que son ombre !
/>/>/> non je rigole.Même moi des fois je rate des soudures , je ne peux pas lui apprendre a souder si moi je commence a apprendre
/>/>EDIT: je suis en train de réaliser sur SolidWork l'aperçu de mon robot avec les tailles réelles. Des que je finis , je les publie.
#55043 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 02:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je ne préfère pas lui faire utiliser un fer a souder , même que je me tiens a cote de lui. Les capteurs qui sont sur roboshop sont pratique puisque aucune soudure n'est requise et donc vas éviter de faire une catastrophe (pour mon frère de 12 ans). Les capteurs sont aussi pratique car si il y a un pépin niveaux électronique avec le système on pourra mieux cerner le problème. Mais en tout cas merci du lien du robot suiveur de ligne 
Sinon le lien que tu m'as joins Gyro49 avec le capteur "Cytron" c'est en fait 5 capteur(et 5 led IR) sur un et même PCB ? Donc je peux l'utiliser avec l' Arduino.
Je préfère ce capteur que celui que j'ai joins plus haut , car il est moins cher et il y a plus de capteur. Mais niveaux programme c'est pas chiant a faire ?
En tout cas merci de vos réponses et de vos conseils !
Sinon le lien que tu m'as joins Gyro49 avec le capteur "Cytron" c'est en fait 5 capteur(et 5 led IR) sur un et même PCB ? Donc je peux l'utiliser avec l' Arduino.
Je préfère ce capteur que celui que j'ai joins plus haut , car il est moins cher et il y a plus de capteur. Mais niveaux programme c'est pas chiant a faire ?
En tout cas merci de vos réponses et de vos conseils !
#55035 robot suiveur de ligne arduino
Posté par
sur 02 avril 2013 - 08:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut a tous !
Aujourd'hui j'ai un petit projet en tête - construire un robot suiveur de ligne noir avec Arduino.
En fait c'est pour mon petit frère de 12 ans qui aime bien regarder ce que je fais , je veux donc lui donner gout a la robotique en lui proposant de construire quelque chose de simple et ludique pour lui. Donc pour faire simple je ne veux pas lui faire faire des circuit avec des capteur IR , des LED IR , des résistance, des condensateurs et des transistor , ect ....
beaucoup trop compliquer pour son age.
Je pensais utiliser deux/trois petit capteurs grove seeestudio a connecter directement sur l' Arduino , deux moteur DC et un L293D.
Donc je viens ici pour vous demander un petit peu d'aide/>/>
Alors voila comme je l'ai dit je vais utiliser :
_ Deux/trois petit capteurs "grove seeestudio" - lien
_ connecteur du capteur - lien
_ Moteur à engrenages Pololu - lien
_ Deux support moteurs - lien
_ Deux roues - lien
_ Un L293D (Double pont en H)
_ Carte Arduino(J'ai une mega2560 , donc je vais l'utiliser pour les test)
donc je dois acheter les capteurs et les moteurs , le reste j'ai deja.
Maintenant mon problème c'est au niveau des capteurs. Combien de capteurs me faut il ? 2 ou 3 ?
je pensais mettre un a droite et un a gauche pour qu'il détectent le fond blanc et quand un des deux détecte la ligne noir il se repositionne. Ou alors mettre un 3eme au centre pour qu'il détecte la ligne noir et si il détecte du blanc il se repositionne.
Donc la je demande votre avis.
Pour le câblage des moteurs avec le L293D voir image ci dessous -
je connecte les EN (enable) ensemble et les connecte sur un pin de l' Arduino
je connecte les PMW chacun sur un pin différent de l' Arduino
les GND sur le GND de l'Arduino
les 9V sur le + de la pile 9 volt
Pour le code je viens de le faire (pour 2 capteurs seulement) et je ne sais pas ce qu'il manque , si quelqu'un peut m'éclairer
En tout cas merci de m'avoir lu et merci d'avance de votre aide.
Aujourd'hui j'ai un petit projet en tête - construire un robot suiveur de ligne noir avec Arduino.
En fait c'est pour mon petit frère de 12 ans qui aime bien regarder ce que je fais , je veux donc lui donner gout a la robotique en lui proposant de construire quelque chose de simple et ludique pour lui. Donc pour faire simple je ne veux pas lui faire faire des circuit avec des capteur IR , des LED IR , des résistance, des condensateurs et des transistor , ect ....
beaucoup trop compliquer pour son age.
Je pensais utiliser deux/trois petit capteurs grove seeestudio a connecter directement sur l' Arduino , deux moteur DC et un L293D.
Donc je viens ici pour vous demander un petit peu d'aide
/>/> Alors voila comme je l'ai dit je vais utiliser :
_ Deux/trois petit capteurs "grove seeestudio" - lien
_ connecteur du capteur - lien
_ Moteur à engrenages Pololu - lien
_ Deux support moteurs - lien
_ Deux roues - lien
_ Un L293D (Double pont en H)
_ Carte Arduino(J'ai une mega2560 , donc je vais l'utiliser pour les test)
donc je dois acheter les capteurs et les moteurs , le reste j'ai deja.
Maintenant mon problème c'est au niveau des capteurs. Combien de capteurs me faut il ? 2 ou 3 ?
je pensais mettre un a droite et un a gauche pour qu'il détectent le fond blanc et quand un des deux détecte la ligne noir il se repositionne. Ou alors mettre un 3eme au centre pour qu'il détecte la ligne noir et si il détecte du blanc il se repositionne.
Donc la je demande votre avis.
Pour le câblage des moteurs avec le L293D voir image ci dessous -
je connecte les EN (enable) ensemble et les connecte sur un pin de l' Arduino
je connecte les PMW chacun sur un pin différent de l' Arduino
les GND sur le GND de l'Arduino
les 9V sur le + de la pile 9 volt
Pour le code je viens de le faire (pour 2 capteurs seulement) et je ne sais pas ce qu'il manque , si quelqu'un peut m'éclairer
int signalPin_Gauche = 2; //capteur de ligne grove seeedstudio
int signalPin_Droite = 3; //capteur de ligne grove seeedstudio
int Motor1 = 4; // L293D - premier moteur pin 1 (Gauche)
int Motor2 = 5; // L293D - premier moteur pin 2 (Gauche)
int Motor3 = 6; // L293D - second moteur pin 1 (Droite)
int Motor4 = 7; // L293D - second moteur pin 2 (Droite)
int Enable1_2 = 8; // L293D - les 2 pins enable
void setup() {
pinMode(signalPin_Gauche, INPUT);
pinMode(signalPin_Droite, INPUT);
pinMode(Motor1, OUTPUT); // Gauche
pinMode(Motor2, OUTPUT); // Gauche
pinMode(Motor3, OUTPUT); // Droite
pinMode(Motor4, OUTPUT); // Droite
pinMode(Enable1_2 , OUTPUT);
digitalWrite(Enable1_2, HIGH);
Serial.begin(9600);
}
void loop()
{
if(HIGH == digitalRead(signalPin_Gauche)) // si le capteur de gauche se met en etat HIGH le robot doit se deplacer ver la droite
{
digitalWrite(Motor3, LOW); // Droite eteint
digitalWrite(Motor4, LOW); // Droite eteint
digitalWrite(Motor1, HIGH); // Gauche allumer
digitalWrite(Motor2, HIGH); // Gauche allumer
}
else // sinon on allume les 2 moteurs et le robot va tout droit
{
digitalWrite(Motor1, HIGH); // Droite allumer
digitalWrite(Motor2, HIGH); // Droite allumer
digitalWrite(Motor3, HIGH); //Gauche allumer
digitalWrite(Motor4, HIGH); //Gauche allumer
}
if(HIGH == digitalRead(signalPin_Droite)) // si le capteur de droite se met en etat HIGH le robot doit se deplacer ver la gauche
{
digitalWrite(Motor3, HIGH); // Droite allumer
digitalWrite(Motor4, HIGH); // Droite allumer
digitalWrite(Motor1, LOW); //Gauche eteint
digitalWrite(Motor2, LOW); //Gauche eteint
}
else // sinon on allume les 2 moteurs et le robot va tout droit
{
digitalWrite(Motor1, HIGH); // Droite allumer
digitalWrite(Motor2, HIGH); // Droite allumer
digitalWrite(Motor3, HIGH); //Gauche allumer
digitalWrite(Motor4, HIGH); //Gauche allumer
}
}
En tout cas merci de m'avoir lu et merci d'avance de votre aide.
Image(s) jointe(s)

#33831 Qu'est ce qu'un Shield ?
Posté par
sur 03 septembre 2011 - 06:15
dans
Electronique
Salut ,
si c'est exactement ca , ce dont je parlais. Donc en fait se sont des "extensions" pour rajouter des fonctions a une carte Arduino, si j'ai bien compris . Merci eaucoup.
#33838 Qu'est ce qu'un Shield ?
Posté par
sur 04 septembre 2011 - 06:40
dans
Electronique
merci a toi , je vais commencer a apprendre le language C++ sur le www.siteduzero.com bonne journee .
bonne journee .
#33836 Qu'est ce qu'un Shield ?
Posté par
sur 04 septembre 2011 - 06:02
dans
Electronique
merci beaucoup de ta reponse , claire et simple
pour programmer une Arduino , on utilise le language C++ ou , y-a t'il d'autre language de programmation ?
pour programmer une Arduino , on utilise le language C++ ou , y-a t'il d'autre language de programmation ?
#33847 Qu'est ce qu'un Shield ?
Posté par
sur 04 septembre 2011 - 11:35
dans
Electronique
Astondb8 je parle l'hebreu est c est plus facile que du C .
Moi je prefere apprendre du C++ , quitte a etre plus complique, mais qui seras mieu que le C . Apres chaqun ses facons .
Soyez gentil en passant , pour mon projet robot suiveur de ligne ou pourrais je troivais : led IR EL-7L et capteur IR ST-7L ????
Moi je prefere apprendre du C++ , quitte a etre plus complique, mais qui seras mieu que le C . Apres chaqun ses facons .
Soyez gentil en passant , pour mon projet robot suiveur de ligne ou pourrais je troivais : led IR EL-7L et capteur IR ST-7L ????
#33793 Qu'est ce qu'un Shield ?
Posté par
sur 02 septembre 2011 - 02:52
dans
Electronique
Bonjour ,
Je voudrais savoir qu'est ce qu'un Shield et a quoi cela sert ?? Merci et bonne journee a vous.
#49454 Bien commencer en robotique : tuto et documentation
Posté par
sur 12 octobre 2012 - 01:38
dans
Conseils et aide aux débutants, livres et kits en robotique
Infos, trucs, astuces et tutos : www.instructables.com
montages electroniques : www.positron-libre.com
astuces, programmation ,kinet , hack , electronique et tutos : http://luckylarry.co.uk/
montages electroniques : www.positron-libre.com
astuces, programmation ,kinet , hack , electronique et tutos : http://luckylarry.co.uk/
#55326 Un robot collectif, le robot des robot-makers
Posté par
sur 11 avril 2013 - 05:08
dans
Robotique ludique, robotique insolite
_ Une Raspberry / Arduino .
_ moteurs à courant continu , avec une boite a engrenage. reste a définir la réduction du moteur.
_ La carte qui permet la gestion des moteurs à courant continu comme l'a dit mike118. Avec asservissement des moteurs (régulation PID) , non ?
_ Alimentation (je ne sais pas du tout )
)
_ poids total(châssis et composants) : 5kg (je pense que l'on sera en dessous)
_ On utilise donc 2 moteurs (ou 4)
_ moteurs à courant continu , avec une boite a engrenage. reste a définir la réduction du moteur.
_ La carte qui permet la gestion des moteurs à courant continu comme l'a dit mike118. Avec asservissement des moteurs (régulation PID) , non ?
_ Alimentation (je ne sais pas du tout
)_ poids total(châssis et composants) : 5kg (je pense que l'on sera en dessous)
_ On utilise donc 2 moteurs (ou 4)
#55348 Un robot collectif, le robot des robot-makers
Posté par
sur 11 avril 2013 - 07:14
dans
Robotique ludique, robotique insolite
Je viens de mettre en ligne le cahier de charge. "Cahier de Charges ( 11/04/2013 )" . Si il faut modifier ou ajouter , faites le car je l'ai mis en WORD , tout le monde a WORD(je crois)
#55284 Un robot collectif, le robot des robot-makers
Posté par
sur 10 avril 2013 - 11:19
dans
Robotique ludique, robotique insolite
Woaw ! beaucoup de termes technique que je n'ai jamais entendu et que je n'ai jamais appris malheureusement mais cava j'ai compris dans l'ensemble ce que vous voulais faire. 
En tout cas c'est mieux de faire un robot compliquer mais facile a utiliser et a moduler , qu'un robot facile , mais compliquer a moduler.
A part ca , quels sont les points importants que nous devons répondre et résoudre ?
mais cava j'ai compris dans l'ensemble ce que vous voulais faire. En tout cas c'est mieux de faire un robot compliquer mais facile a utiliser et a moduler , qu'un robot facile , mais compliquer a moduler.
A part ca , quels sont les points importants que nous devons répondre et résoudre ?
#55236 Un robot collectif, le robot des robot-makers
Posté par
sur 08 avril 2013 - 09:37
dans
Robotique ludique, robotique insolite
j'aime bien les idées , moi j'imagine le robot avec 2 ou 4 roues motrices avec des roue codeuse. sur le dessus du châssis on place le cerveau (donc arduino , pic ou rasberry pi ) avec a cote l'alimentation avec accès facile. sur l'avant du robot on place un capteur ultrasons . Un second étage avec comme l'a dit mike118 une tourelle pan tilt (avec 2 micro servomoteurs?) sur cette tourelle une camera , un capteur ou a la place de la tourelle un bras avec une pince. Sur cette même pince pourquoi pas une camera. quelques LEDS pour faire des effets (du même style qu'une voiture , quand il tourne a gauche la LED de gauche clignote , quand il fait marche arrière deux LEDS blanche a l'arrière s'allume) , un capteur de température et d'humidité pour avoir des informations sur l'environnement ou se trouve le robot.
EDIT : avec une connexion internet pour le controler partout dans le monde ! Mouahahahaa

Maintenant chacun peux imaginer a quoi ressemblerai le robot et en fonction de ces avis on ne prendra que les points communs . Je pense que cela est juste , après ceci est a discuter
EDIT : avec une connexion internet pour le controler partout dans le monde ! Mouahahahaa
Maintenant chacun peux imaginer a quoi ressemblerai le robot et en fonction de ces avis on ne prendra que les points communs . Je pense que cela est juste , après ceci est a discuter
#55218 Un robot collectif, le robot des robot-makers
Posté par
sur 08 avril 2013 - 02:22
dans
Robotique ludique, robotique insolite
Si c'est ca :
électronique : je ne suis pas un monstre , mais je connais les bases de chez bases
mécanique : je me débrouille pas mal
programmation : Arduino mais encore très débutant.
Sinon je sais faire des plans et des objets en 3D avec solidwork.
J'ai de l'imagination pour le design du robot.
En tout cas je veux participer a ce projet.
EDIT : au fait quel genre de robot voulais vous faire ?
électronique : je ne suis pas un monstre , mais je connais les bases de chez bases
mécanique : je me débrouille pas mal
programmation : Arduino mais encore très débutant.
Sinon je sais faire des plans et des objets en 3D avec solidwork.
J'ai de l'imagination pour le design du robot.
En tout cas je veux participer a ce projet.
EDIT : au fait quel genre de robot voulais vous faire ?
#55256 Un robot collectif, le robot des robot-makers
Posté par
sur 09 avril 2013 - 06:26
dans
Robotique ludique, robotique insolite
Dropbox est simple d'utilisation , un mail , un mot de passe et tout le monde peut avoir acces. Les fichiers sont mis a jour a la seconde ou il ont était télécharger.
Moi j'utilise pour les plans et images 3D Solidworks. Donc si il y a besoin , je peux dessiner et poster.
Pour les moteurs , il faut d'abord savoir combien va peser notre robot. Voyons maintenant ce que nous allons utiliser et quel genre de robot construire.
_Pour commencer on vas décider de combien de moteurs utiliser ? Car il faudra un moment a un autre se décider. (A voter?)
_utilise t-on OUI ou NON des encodeurs ?
_quel sera le cerveau de notre robot ? raspberry pi , Arduino ou PIC ?
_ Quels genres de capteurs et combien allons nous mettre ? camera ?
_ Utiliserons nous des servomoteurs ?
_ Ensuite en fonction de tout ce que l'on aura choisi on pourra savoir quels moteurs prendre , et quelle alimentation.
Je pense que l'on doit répondre a ces questions ensemble et de donner chacun notre avis.
Voila mon avis sur :
_moteurs : 2 (car niveaux budget il faut éviter d'en faire trop)
_encodeurs : oui
_cerveau : j'aurais aimer Arduino pour apprendre , mais je vois que la plus part sont des pros de la rapberry pi. Donc ca a vous de voir car je sais pas programmer.
_capteurs : 1 US , 1 Température/Humidité , 1 camera
_servo : oui , 2 (pan/tilt pour camera)
Moi j'utilise pour les plans et images 3D Solidworks. Donc si il y a besoin , je peux dessiner et poster.
Pour les moteurs , il faut d'abord savoir combien va peser notre robot. Voyons maintenant ce que nous allons utiliser et quel genre de robot construire.
_Pour commencer on vas décider de combien de moteurs utiliser ? Car il faudra un moment a un autre se décider. (A voter?)
_utilise t-on OUI ou NON des encodeurs ?
_quel sera le cerveau de notre robot ? raspberry pi , Arduino ou PIC ?
_ Quels genres de capteurs et combien allons nous mettre ? camera ?
_ Utiliserons nous des servomoteurs ?
_ Ensuite en fonction de tout ce que l'on aura choisi on pourra savoir quels moteurs prendre , et quelle alimentation.
Je pense que l'on doit répondre a ces questions ensemble et de donner chacun notre avis.
Voila mon avis sur :
_moteurs : 2 (car niveaux budget il faut éviter d'en faire trop)
_encodeurs : oui
_cerveau : j'aurais aimer Arduino pour apprendre , mais je vois que la plus part sont des pros de la rapberry pi. Donc ca a vous de voir car je sais pas programmer.
_capteurs : 1 US , 1 Température/Humidité , 1 camera
_servo : oui , 2 (pan/tilt pour camera)




