void loop()
{
int avancer;
VAL = pulseIn(10, HIGH, 25000);
if (VAL < (1000+490))
{
avancer =(((VAL-(1000 + 490) )/490)*(255-70) -70);
digitalWrite(motorD1, LOW);
digitalWrite(motorD2, HIGH);
digitalWrite(motorG1, LOW);
digitalWrite(motorG2, HIGH);
analogWrite (speedD, avancer);
analogWrite (speedG, avaancer);
}
else if (VAL > ( 2000 - 490))
{
avancer = (((VAL-( 2000 - 490))/490)*(255-70) +70);
digitalWrite(motorD1, HIGH);
digitalWrite(motorD2, LOW);
digitalWrite(motorG1, HIGH);
digitalWrite(motorG2, LOW);
analogWrite (speedD, avancer);
analogWrite (speedG, avancer);
}
else
{
}
}
Contenu de Newbies
Il y a 485 élément(s) pour Newbies (recherche limitée depuis 29-mai 13)
Par type de contenu
Voir pour ce membre
#60264 Télécommander mon robot
 Posté par
sur 23 mars 2014 - 12:49
dans
Electronique
Posté par
sur 23 mars 2014 - 12:49
dans
Electronique
Un truc plus comme ca ?
#56132 Télécommande 2,4GHZ et arduino ?
Posté par
sur 15 mai 2013 - 11:46
dans
Electronique
Salut tous le monde,
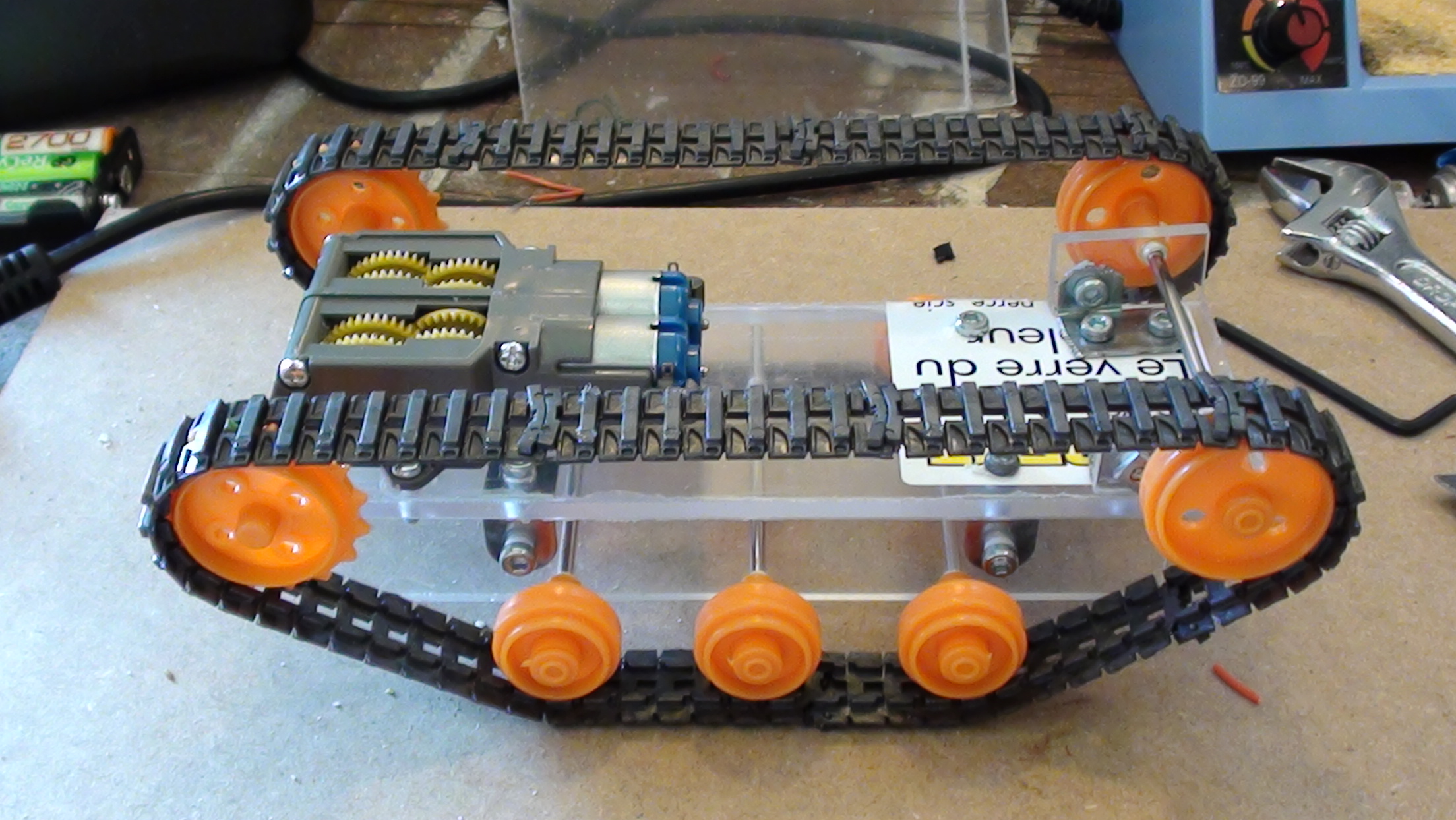
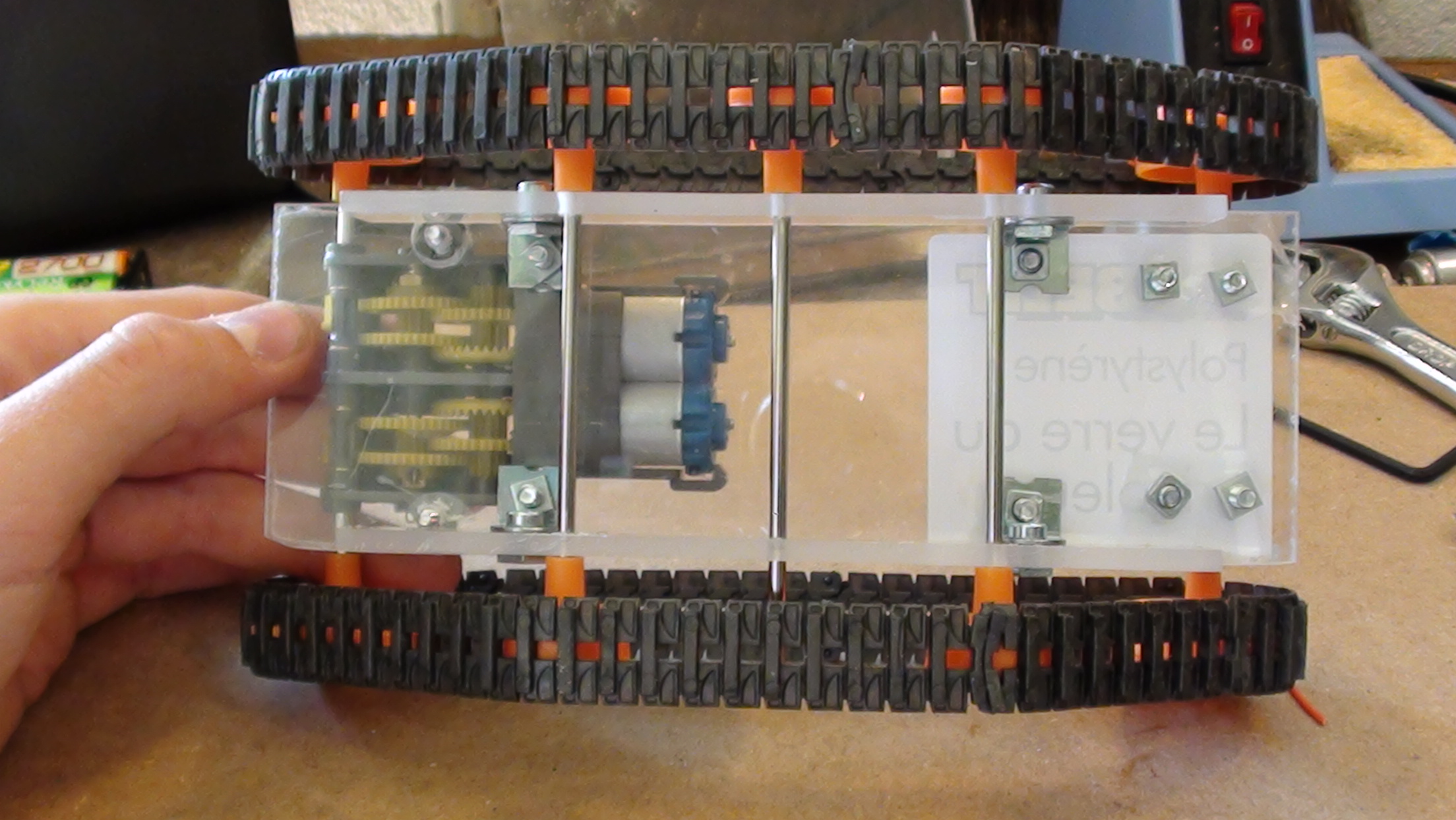
Ayant recemment trouver un superbe châssis a chenilles qui est donc non motoriser ( car issue d'un jouet chasse neige ).
J'aimerais beaucoup télécommander cette engin grâce a une télécommande 2,4 ghz ( que j'ai dejas ) mais je n'ai pas de contrôleurs de moteurs CC pour contrôler les moteurs de l'engin et je n'ai pas vraiment envie d'en acheter.
C'est pourquoi je me suis dit que je pouvais passer par une arduino et un L298N ( que j'ai en plus en quantité ) pour contrôler les moteurs ( qui seront, je pense, des moteurs 12V )
c'est donc la que le probleme se pose : Comment faire communiquer une arduino avec une télécommande ?
J'ai pensé a connecté la broche de signal de sortit des différentes voies du récepteur au entrée analogique ( ou numérique pour PWM ? ).
Je pourrais ainsi lire ces valeurs ( 0 a 1023 ? ) que je "maperais" entre 0 et 255 pour ensuite faire varier "enable Pin" sur mon L298N et donc la vitesse de mes moteurs.
Cette solution vous parait elle possible ? et si oui je vais avoir besoin d'un coup de pousse pour le code car j'ai encore du mal ^^
Dite moi si vous voulez des photos du chassis car il est vraiment cool />
/>
Ayant recemment trouver un superbe châssis a chenilles qui est donc non motoriser ( car issue d'un jouet chasse neige ).
J'aimerais beaucoup télécommander cette engin grâce a une télécommande 2,4 ghz ( que j'ai dejas ) mais je n'ai pas de contrôleurs de moteurs CC pour contrôler les moteurs de l'engin et je n'ai pas vraiment envie d'en acheter.
C'est pourquoi je me suis dit que je pouvais passer par une arduino et un L298N ( que j'ai en plus en quantité ) pour contrôler les moteurs ( qui seront, je pense, des moteurs 12V )
c'est donc la que le probleme se pose : Comment faire communiquer une arduino avec une télécommande ?
J'ai pensé a connecté la broche de signal de sortit des différentes voies du récepteur au entrée analogique ( ou numérique pour PWM ? ).
Je pourrais ainsi lire ces valeurs ( 0 a 1023 ? ) que je "maperais" entre 0 et 255 pour ensuite faire varier "enable Pin" sur mon L298N et donc la vitesse de mes moteurs.
Cette solution vous parait elle possible ? et si oui je vais avoir besoin d'un coup de pousse pour le code car j'ai encore du mal ^^
Dite moi si vous voulez des photos du chassis car il est vraiment cool
/>
#56155 Télécommande 2,4GHZ et arduino ?
Posté par
sur 15 mai 2013 - 07:10
dans
Electronique
J'ai trouver un tutoriel bien detailler et qui correspond a mon projet https://www.sparkfun.com/tutorials/348 mais j'aimerais comprendre une partit de son code final que je n'ai pas comprise.
Voila la partit que je n'ai pas comprit :
Je me demandait aussi si dans son code il inclu aussi la partit communication avec le L298 car ca ma l'air trop simple ^^
Voila la partit que je n'ai pas comprit :
if(turn>0){analogWrite(pwm_b, move-turn); analogWrite(pwm_a, move);};
if(turn<0){turn=abs(turn); analogWrite(pwm_a, move-turn); analogWrite(pwm_b, move);};Je me demandait aussi si dans son code il inclu aussi la partit communication avec le L298 car ca ma l'air trop simple ^^
#56263 Télécommande 2,4GHZ et arduino ?
Posté par
sur 20 mai 2013 - 07:59
dans
Electronique
Je vient de faire un montage permettant de testé mon L298N ( c'est a dire faire artificielement ce que l'arduino devra faire pour mettre en marche un moteur )
Et quand je met en marche le system le moteur se met atourné pendant 1 seconde. Aprés, il s'arrete et ne redemarre (pour 1 seconde) que quand je debranche rebranche.
Une idée ?
Peut tu me passé un exemple de montage que tu a realisé ?
Et quand je met en marche le system le moteur se met atourné pendant 1 seconde. Aprés, il s'arrete et ne redemarre (pour 1 seconde) que quand je debranche rebranche.
Une idée ?
Peut tu me passé un exemple de montage que tu a realisé ?
#56250 Télécommande 2,4GHZ et arduino ?
Posté par
sur 20 mai 2013 - 11:06
dans
Electronique
Non car je n'ai pas mis de LED mais je suppose que si il y en avait, elle resterais éteinte.
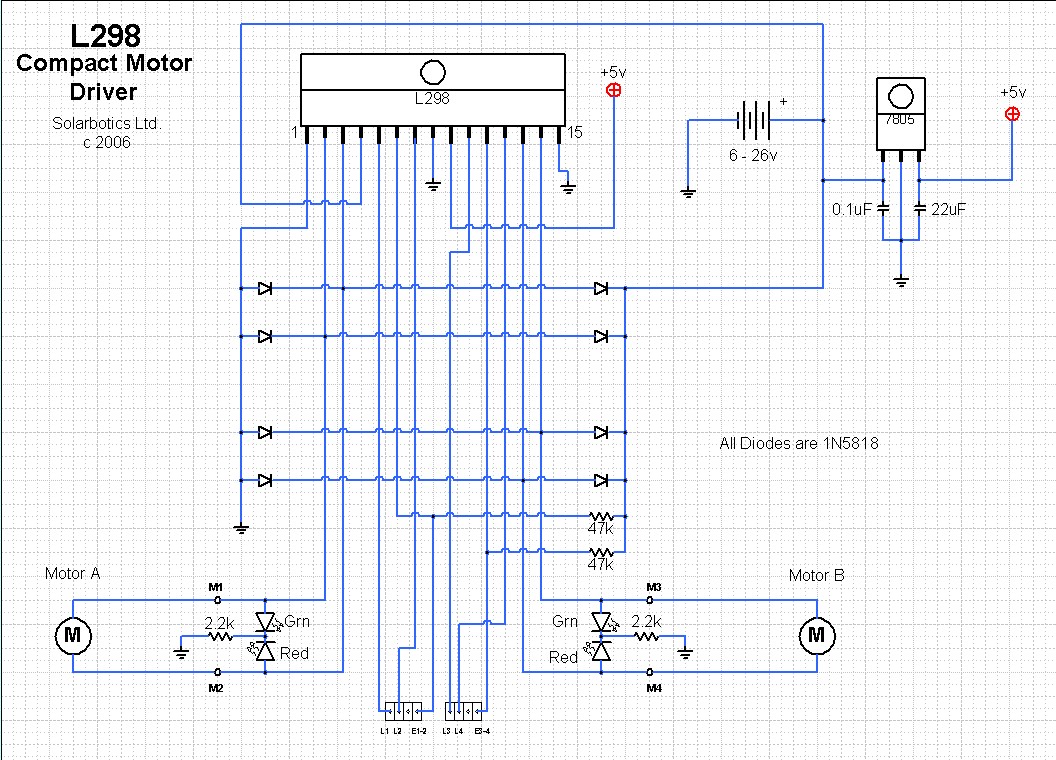
Je pense re faire un shield ( basé sur ce shema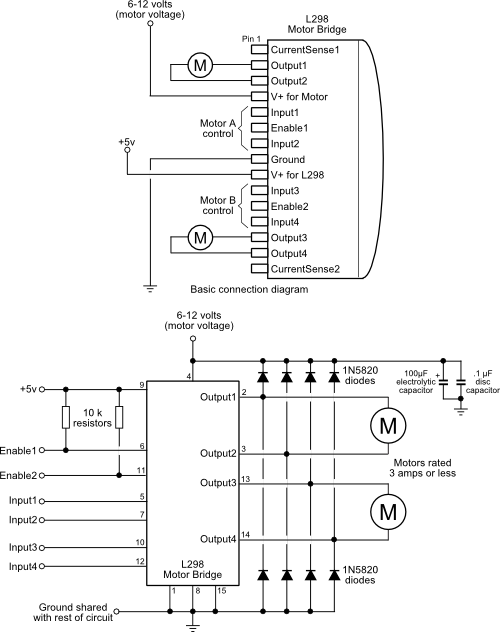 ) dont je testerai le fonctionnement a chaque etape.
) dont je testerai le fonctionnement a chaque etape.
Le resistance pull up sont elle obligatoire au enablepin ? Mes diodes ( 1N5821 ) sont elles adapté ?
Je pense re faire un shield ( basé sur ce shema
) dont je testerai le fonctionnement a chaque etape.Le resistance pull up sont elle obligatoire au enablepin ? Mes diodes ( 1N5821 ) sont elles adapté ?
#56215 Télécommande 2,4GHZ et arduino ?
Posté par
sur 17 mai 2013 - 10:34
dans
Electronique
Je vient d'essayer le code du tutoriel mais je n'obtient pas le même résultat car lui les chiffres qui apparaisse sont entre 1000 et 2000 et varie en fonction de la position des manches sur la télécommande et moi les chiffres sont entre 0 et 10000 et ne varie pas ( mon système radio fonctionne par ailleurs bien ).
de plus, il a l'air d'avoir la meme telecommande que moi...
Voila le code :
de plus, il a l'air d'avoir la meme telecommande que moi...
Voila le code :
int ch1; // Here's where we'll keep our channel values
int ch2;
int ch3;
void setup() {
pinMode(5, INPUT); // Set our input pins as such
pinMode(6, INPUT);
pinMode(7, INPUT);
Serial.begin(9600); // Pour a bowl of Serial
}
void loop() {
ch1 = pulseIn(5, HIGH, 25000); // Read the pulse width of
ch2 = pulseIn(6, HIGH, 25000); // each channel
ch3 = pulseIn(7, HIGH, 25000);
Serial.print("Channel 1:"); // Print the value of
Serial.println(ch1); // each channel
Serial.print("Channel 2:");
Serial.println(ch2);
Serial.print("Channel 3:");
Serial.println(ch3);
delay(100); // I put this here just to make the terminal
// window happier
}
#56220 Télécommande 2,4GHZ et arduino ?
Posté par
sur 18 mai 2013 - 10:34
dans
Electronique
Je vien aussi d'essayer de faire un montage a base de L298N qui ne marche pas. Quelqu'un serait comment utiliser SIMPLEMENT ce controleur de moteur ?
#56169 Télécommande 2,4GHZ et arduino ?
Posté par
sur 16 mai 2013 - 11:40
dans
Electronique
Je vais peut être aussi rajouter un capteur US sur l'engin qui sera une sorte d'anticollision mais bon, chaque chose en son temps 
Ayant récemment fait un shield défectueux a base de L298N pour un autre robot je me demandais ce qui fais qu'il ne marche pas et donc ce que je devrais changé pour qu'il fonctionne enfin.
Voila le shema que j'ai respecter ( a part que je n'ai pas de régulateur de courant car j'utilise dejas deux source d'energies et mes diodes sont des 1N5821 au lieu des 1N5818 preconisée)
et voila le code que j'utilise avec
Ayant récemment fait un shield défectueux a base de L298N pour un autre robot je me demandais ce qui fais qu'il ne marche pas et donc ce que je devrais changé pour qu'il fonctionne enfin.
Voila le shema que j'ai respecter ( a part que je n'ai pas de régulateur de courant car j'utilise dejas deux source d'energies et mes diodes sont des 1N5821 au lieu des 1N5818 preconisée)
et voila le code que j'utilise avec
//-- MOTEUR A --
int ENA=5; //Connecté à Arduino pin 5(sortie pwm)
int IN1=2; //Connecté à Arduino pin 2
int IN2=3; //Connecté à Arduino pin 3
//-- MOTEUR B --
int ENB=6; //Connecté à Arduino pin 6(Sortie pwm)
int IN3=4; //Connecté à Arduino pin 4
int IN4=7; //Connecté à Arduino pin 7
void setup() {
pinMode(ENA,OUTPUT);//Configurer les broches comme sortie
pinMode(ENB,OUTPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
digitalWrite(ENA,LOW);// Moteur A - Ne pas tourner (désactivation moteur)
digitalWrite(ENB,LOW);// Moteur B - Ne pas tourner (désactivation moteur)
// Direction du Moteur A
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
// Direction du Moteur B
// NB: en sens inverse du moteur A
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void loop() {
// Moteur A - Plein régime
analogWrite(ENA,255);
// Moteur B - Mi-régime
analogWrite(ENB,128);
}
#56230 Télécommande 2,4GHZ et arduino ?
Posté par
sur 19 mai 2013 - 09:55
dans
Electronique
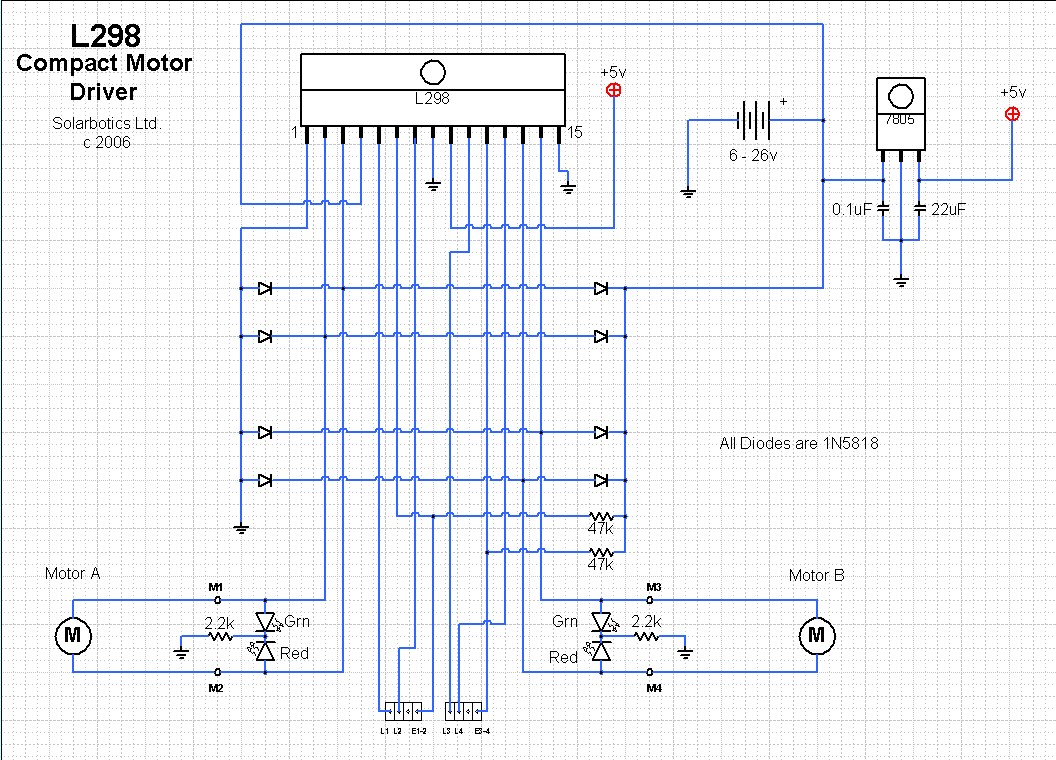
Merci, j'ai lue tes tuto ils sont super !
Pour mon montage j'ai suivi ce shema ( voir plus bas ) dont les seuls modification apporté sont que mes diode sont des 1N5821 ( au lieu des 1N5818 ), que je n'ai pas de resitance pull up sur enable pin car je m'en sert pour controler la vitesse des moteurs et que j'utilise les 5V de l'arduino ( au lieu de réguler Vs pour obtenir du 5V )
Voila le shema:
Et le code que j'utilise avec :
Pour mon montage j'ai suivi ce shema ( voir plus bas ) dont les seuls modification apporté sont que mes diode sont des 1N5821 ( au lieu des 1N5818 ), que je n'ai pas de resitance pull up sur enable pin car je m'en sert pour controler la vitesse des moteurs et que j'utilise les 5V de l'arduino ( au lieu de réguler Vs pour obtenir du 5V )
Voila le shema:
Et le code que j'utilise avec :
//-- MOTEUR A --
int ENA=5; //Connecté à Arduino pin 5(sortie pwm)
int IN1=2; //Connecté à Arduino pin 2
int IN2=3; //Connecté à Arduino pin 3
//-- MOTEUR B --
int ENB=6; //Connecté à Arduino pin 6(Sortie pwm)
int IN3=4; //Connecté à Arduino pin 4
int IN4=7; //Connecté à Arduino pin 7
void setup() {
pinMode(ENA,OUTPUT);//Configurer les broches comme sortie
pinMode(ENB,OUTPUT);
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
digitalWrite(ENA,LOW);// Moteur A - Ne pas tourner (désactivation moteur)
digitalWrite(ENB,LOW);// Moteur B - Ne pas tourner (désactivation moteur)
// Direction du Moteur A
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
// Direction du Moteur B
// NB: en sens inverse du moteur A
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void loop() {
// Moteur A - Plein régime
analogWrite(ENA,255);
// Moteur B - Mi-régime
analogWrite(ENB,128);
}
#57927 Systeme de compactage
Posté par
sur 27 septembre 2013 - 07:30
dans
Mécanique
Salut tout le monde,
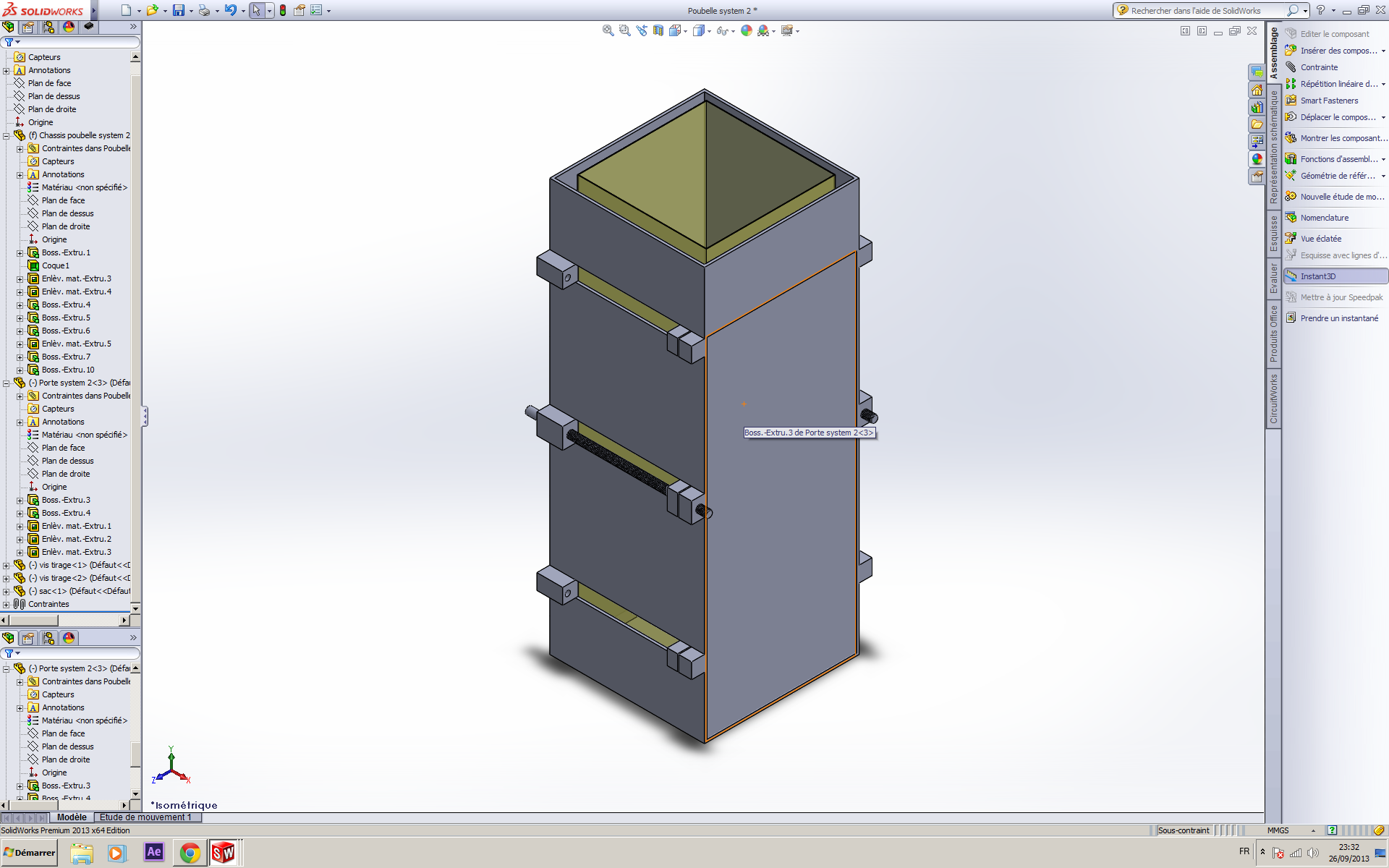
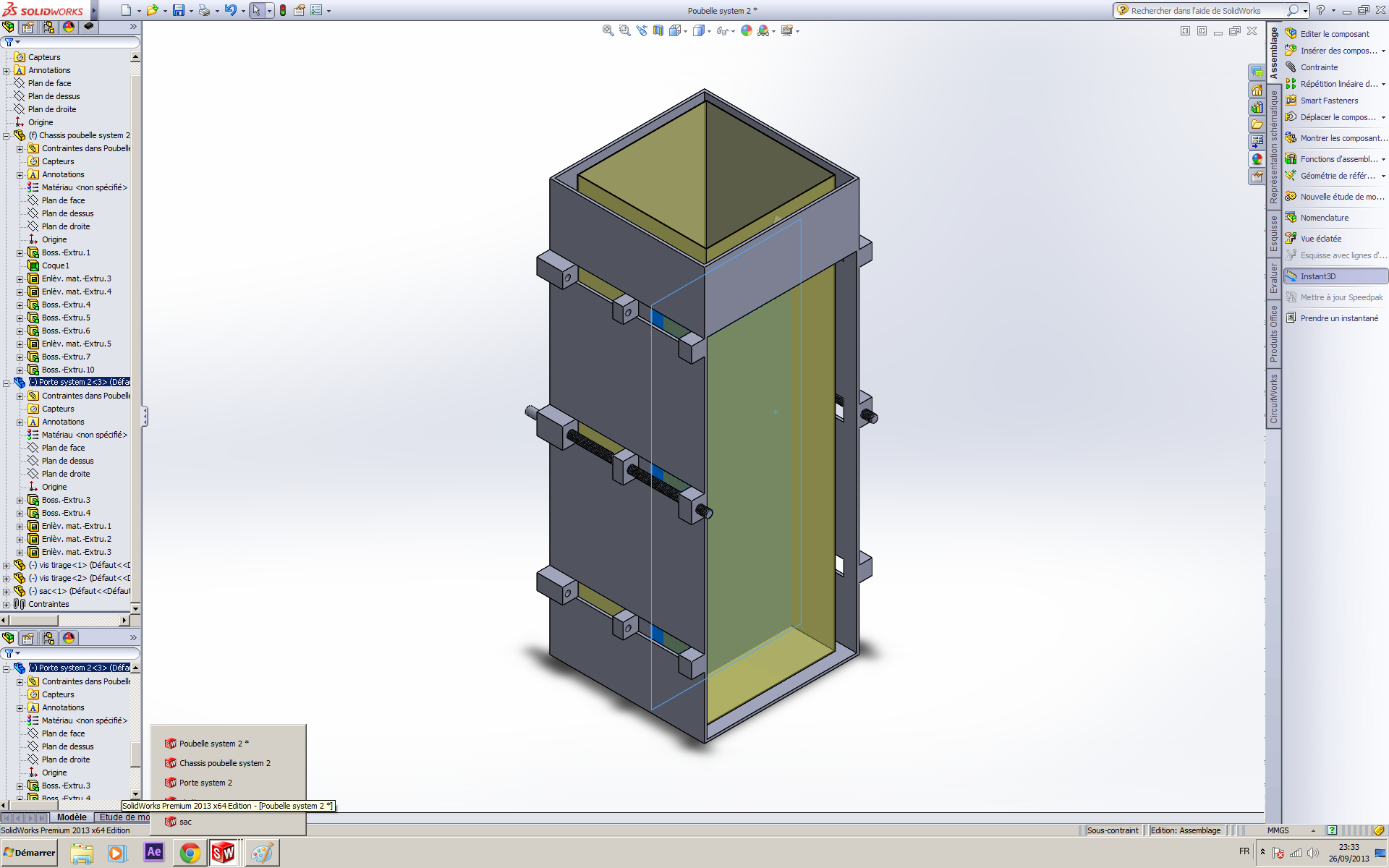
J'ai encore un peut réfléchit sur mon projet de poubelle compacteuse et j'ai trouvé un nouveaux système interposant. Il consiste a compacter les déchets sur le coté de la poubelle ( qui tombe aprés au fond )et non pas vers le fond comme avec le système précédent.
Pour cela je compte utilister deux tiges filetées relié au moteur par une chaîne de vélo.
Le premier problème est que, avec ce système,c'est que le compactage se fais a traver le sac ( sac en jaune sur les photos ) et donc risque de le percer.
Deuxième problème, une fois les déchet compacté il faut que le sac revienne en position initial et ne reste pas collé aux déchets sur le coté.
PS: Les deux troue non remplie dans le plan le seron avec une tige de guidage.
J'ai encore un peut réfléchit sur mon projet de poubelle compacteuse et j'ai trouvé un nouveaux système interposant. Il consiste a compacter les déchets sur le coté de la poubelle ( qui tombe aprés au fond )et non pas vers le fond comme avec le système précédent.
Pour cela je compte utilister deux tiges filetées relié au moteur par une chaîne de vélo.
Le premier problème est que, avec ce système,c'est que le compactage se fais a traver le sac ( sac en jaune sur les photos ) et donc risque de le percer.
Deuxième problème, une fois les déchet compacté il faut que le sac revienne en position initial et ne reste pas collé aux déchets sur le coté.
PS: Les deux troue non remplie dans le plan le seron avec une tige de guidage.
Image(s) jointe(s)
#57931 Systeme de compactage
Posté par
sur 27 septembre 2013 - 04:36
dans
Mécanique
J'ai effectivement pensez a ça mais comme le système dois a terme être installé sur des poubelles encastrer, je crains que 40cm de haut ne suffise pas pour faire deux partis.
#43272 Super site
Posté par
sur 17 mai 2012 - 06:41
dans
Archives
Voilà en cherchant un kit tamiya sur internet je suis tombe sur ce site http://www.alpha-crucis.com/fr/13-composants-robotiques qui est bien fait vraiment pas très cher et en plus français par exemple les capteurs sharp sont a 11 euro ce qui pour un site français est plutôt cool.
Voilà je sais que je suis pas dans la bonne catégorie mais comme personne ne regarde les catégorie en dessous
Voilà je sais que je suis pas dans la bonne catégorie mais comme personne ne regarde les catégorie en dessous
#61005 Simple interface python
Posté par
sur 02 juillet 2014 - 12:44
dans
Programmation
Salut les gars,
Etant encore au lycée, j'ai décidé, cet été, de bosser 1 mois dans un boite de développement web ou autre. Je fini donc par décroché un job dans une boite de développement web. Bref arrivé la bas, le patron me propose de réaliser pour lui et, en un mois, le prototype d'un de ses projets qui utilise un système concu par lui même ( et qu'il à déjà breveté pour les petits malins ).
Ce système est un système de saisie et de navigation pour écran tactile de petites tailles ( montres, eletroménager, etc... ). Il se base sur un menu comportant 6 touches. A l'appuis sur l'une des touche, les autres prennent la couleurs de cette dernière et change donc d'utilité. Il suffit alors, sans avoir relâché le doigt après l'appuis de la première touche, de faire glisser son doigt vers une des nouvelles touches qui aura apparut. Ce système permet donc en très peut de place ( 6 cases ) daccéder rapidement à beaucoup d'autres ( 36 cases ).
( Pour les explications, jappellerais "touches de niveau 1" les 6 premières touches et "touche de niveau 2" les touches "crées" par l'appuis sur une des touches de niveau 1 )
Le prototype que je doit réaliser reprend ce système, il sera constitué d'un Raspberry Pi sur lequel sera branché une dalle tactile ( http://www.adafruit.com/products/1601 ). Sur cet écran devront apparaître les 6 touches de couleurs differentes ( voir photo ), l'appuis sur une de ces touches changera la couleurs des autres en celle de cette dernière. Aussi et, pour montrer les capacité de ce système à ce connecter à son environnement, une des touches de niveau 2 devra ouvrir un petit panneau de contrôle afin de piloté un robot sous arduino ( que j'ai déjà ) via bluetooth et une autre touche de niveau deux permettra de faire passer le robot en mode autonome.
N'ayant que les (grosses) bases du python, je n'ais aucune idée de par ou commencer ( surtout au niveau de l'interface graphique que je compte faire en python aussi ) ni des éventuels outils permettant de crée ce genre dinterfaces.
Je compte donc sur votre aide pour : m'orienter dans mes recherches, me dire si mon projet vous semble réalisable, si une interface graphique peut être fait en python et si oui comment
J'ai déjà vue sur le site d'Adafruits un moyen de faire tourné un version un peut modifiée de Raspian sur leur écran tactile https://learn.adafru...ay-raspberry-pi
Le matériel me sera fournit par la boite et j'ai un mois pile pour arriver à un résultat.
Merci d'avance
Ci dessous, un aperçu de ce a quoi devra ressemblé linterface :

Etant encore au lycée, j'ai décidé, cet été, de bosser 1 mois dans un boite de développement web ou autre. Je fini donc par décroché un job dans une boite de développement web. Bref arrivé la bas, le patron me propose de réaliser pour lui et, en un mois, le prototype d'un de ses projets qui utilise un système concu par lui même ( et qu'il à déjà breveté pour les petits malins
).Ce système est un système de saisie et de navigation pour écran tactile de petites tailles ( montres, eletroménager, etc... ). Il se base sur un menu comportant 6 touches. A l'appuis sur l'une des touche, les autres prennent la couleurs de cette dernière et change donc d'utilité. Il suffit alors, sans avoir relâché le doigt après l'appuis de la première touche, de faire glisser son doigt vers une des nouvelles touches qui aura apparut. Ce système permet donc en très peut de place ( 6 cases ) daccéder rapidement à beaucoup d'autres ( 36 cases ).
( Pour les explications, jappellerais "touches de niveau 1" les 6 premières touches et "touche de niveau 2" les touches "crées" par l'appuis sur une des touches de niveau 1 )
Le prototype que je doit réaliser reprend ce système, il sera constitué d'un Raspberry Pi sur lequel sera branché une dalle tactile ( http://www.adafruit.com/products/1601 ). Sur cet écran devront apparaître les 6 touches de couleurs differentes ( voir photo ), l'appuis sur une de ces touches changera la couleurs des autres en celle de cette dernière. Aussi et, pour montrer les capacité de ce système à ce connecter à son environnement, une des touches de niveau 2 devra ouvrir un petit panneau de contrôle afin de piloté un robot sous arduino ( que j'ai déjà ) via bluetooth et une autre touche de niveau deux permettra de faire passer le robot en mode autonome.
N'ayant que les (grosses) bases du python, je n'ais aucune idée de par ou commencer ( surtout au niveau de l'interface graphique que je compte faire en python aussi ) ni des éventuels outils permettant de crée ce genre dinterfaces.
Je compte donc sur votre aide pour : m'orienter dans mes recherches, me dire si mon projet vous semble réalisable, si une interface graphique peut être fait en python et si oui comment
J'ai déjà vue sur le site d'Adafruits un moyen de faire tourné un version un peut modifiée de Raspian sur leur écran tactile
https://learn.adafru...ay-raspberry-piLe matériel me sera fournit par la boite et j'ai un mois pile pour arriver à un résultat.
Merci d'avance
Ci dessous, un aperçu de ce a quoi devra ressemblé linterface :
#55546 Shield moteur homemade
Posté par
sur 19 avril 2013 - 04:46
dans
Electronique
Ok, alors je vais juste mettre des diodes de roue libres. J'ai trouver ce shema Mon lien mais pour une diode de roue libre une seule par moteur ne suffit pas normalement ?
Et est il important d'avoir un model preci de diode pour que ela fontionne, une diode est une diode non ?
Meri encore
Je possede seulement un seul model de diode ( celle que j'avais acheté pour mon premier robot pour le college ) et elles sont toutes petites
Et est il important d'avoir un model preci de diode pour que ela fontionne, une diode est une diode non ?
Meri encore
Je possede seulement un seul model de diode ( celle que j'avais acheté pour mon premier robot pour le college ) et elles sont toutes petites
#55563 Shield moteur homemade
Posté par
sur 20 avril 2013 - 07:56
dans
Electronique
C'est nickel. Car qui peut le plus peut le moins
Okok je vais commander celles la alors http://www.ebay.fr/itm/1N5821RL-DIODE-SCHOTTKY-30V-3A-DO-201AD-25-STUCK-/360556271106?pt=Bauteile&hash=item53f2d41602
#55557 Shield moteur homemade
Posté par
sur 19 avril 2013 - 07:53
dans
Electronique
Ok, je pense que je vais en commander celles la mais elle sont dispo que en versions 3 A mais je me dit que comme mes moteurs peuvent consommer un peut plus de 2 A en pic c'est peut être pas de trop. Qu'est ce que tu en pense ?
#55536 Shield moteur homemade
Posté par
sur 18 avril 2013 - 10:13
dans
Electronique
Salut les robots maker,
je suis en train de me refaire un shield moteur a base de L298N ( car l'autre, a base de L293D, étais trop faible pour mes moteurs).
Et en regardant un peut sur internet j'ai vus que les shields tout fait avait plein de composant complementaire au L298N.
En général, il y a des diode ( roue libre ), un régulateur de voltage 5V, et des capacitors ( je sais même plus comment on appelle sa en français ^^ ) qui permette au L298N de ne pas être endommager par les moteurs trés instables.
Ma question est : Ces composant sont ils indispensable ? et si oui, lesquels pourrait je utiliser ( quel valeur ) sachant que je récupére mes composants ( a pars les résistances )
merci,
theo
je suis en train de me refaire un shield moteur a base de L298N ( car l'autre, a base de L293D, étais trop faible pour mes moteurs).
Et en regardant un peut sur internet j'ai vus que les shields tout fait avait plein de composant complementaire au L298N.
En général, il y a des diode ( roue libre ), un régulateur de voltage 5V, et des capacitors ( je sais même plus comment on appelle sa en français ^^ ) qui permette au L298N de ne pas être endommager par les moteurs trés instables.
Ma question est : Ces composant sont ils indispensable ? et si oui, lesquels pourrait je utiliser ( quel valeur ) sachant que je récupére mes composants ( a pars les résistances )
merci,
theo
#53984 Salutations
Posté par
sur 05 mars 2013 - 11:45
dans
Et si vous vous présentiez?
5D mk2 *bave* ^^
#60283 Robot suiveur de personne
Posté par
sur 24 mars 2014 - 09:40
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je suis d'accord avec ChristianR, de simples télémètres infrarouges ne suffirons pas à détecter une personne. En revanche, étant moi même en SI ( mais en 1ere pour ma part ) je sais qu'il est difficile de changer le projet en cour de route.
Tu pourrais donc envisager de faire acheter à ton lycée une carte raspberry Pi qui est en gros un mini ordinateur sous linux que tu peut programmer au même titre que l'arduino mais qui te permet surtout des calculs plus poussé tel que du traitement vidéo.
Ainsi, grâce à une simple webcam branchée sur ta Raspberry Pi, tu pourras suivre des personnes/objets/couleurs.
De plus, il te suffirais de rajouter une petite clef USB wifi pour pouvoir voir l'image de la webcam en temps réel et même contrôler ton robot depuis le net ( Si avec ca tu chope pas les 5 points )
Voila Voila, après si tu est obligé d'utiliser le matos que ta déjà acheté, ya quand même moyen de faire un truc sympa
PS : Une Raspberry Pi coûte environ 40E
Tu pourrais donc envisager de faire acheter à ton lycée une carte raspberry Pi qui est en gros un mini ordinateur sous linux que tu peut programmer au même titre que l'arduino mais qui te permet surtout des calculs plus poussé tel que du traitement vidéo.
Ainsi, grâce à une simple webcam branchée sur ta Raspberry Pi, tu pourras suivre des personnes/objets/couleurs.
De plus, il te suffirais de rajouter une petite clef USB wifi pour pouvoir voir l'image de la webcam en temps réel et même contrôler ton robot depuis le net ( Si avec ca tu chope pas les 5 points
)Voila Voila, après si tu est obligé d'utiliser le matos que ta déjà acheté, ya quand même moyen de faire un truc sympa
PS : Une Raspberry Pi coûte environ 40E
#43803 Robot pour le collège Partie 2
Posté par
sur 27 mai 2012 - 02:56
dans
Aide pour projets scolaire
Bon tout d'abord merci de suivre le sujet
Vos Deux proposition me paresse aussi bien l'une que l'autre. Celle de Mike118 permettrais de faire un robot vraiment tout analogique mais celle de swolf de me lancé dans la programation ce qui est aussi une bonne chose.
Tout cela pour vous dire que je n'ai pas fait mon choix ^^ a votre avis la quel est la plus adapté ?
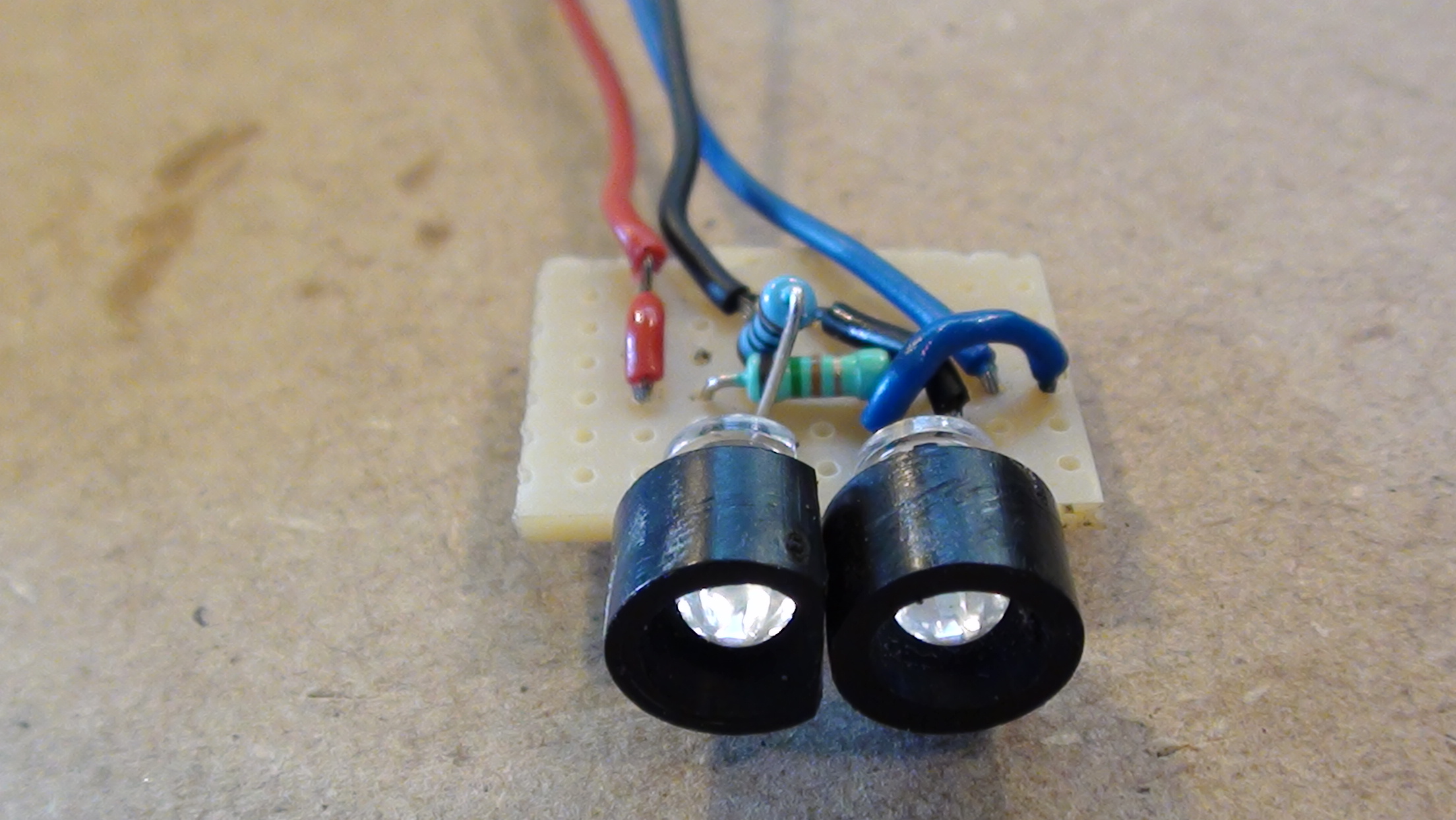
PS: J'ai fini mon chassis que j'ai fait en plexi de 4mm et mes capteurs.
PS²: Sur la photo on voit sur le plexi une étiquette moche c'est juste que je n'ai pas enlever le film de protection
Vos Deux proposition me paresse aussi bien l'une que l'autre. Celle de Mike118 permettrais de faire un robot vraiment tout analogique mais celle de swolf de me lancé dans la programation ce qui est aussi une bonne chose.
Tout cela pour vous dire que je n'ai pas fait mon choix ^^ a votre avis la quel est la plus adapté ?
PS: J'ai fini mon chassis que j'ai fait en plexi de 4mm et mes capteurs.
PS²: Sur la photo on voit sur le plexi une étiquette moche c'est juste que je n'ai pas enlever le film de protection
Image(s) jointe(s)
#43806 Robot pour le collège Partie 2
Posté par
sur 27 mai 2012 - 03:10
dans
Aide pour projets scolaire
Question bonus : Je vais bientot finir mon robot je pense d'ici ce soir ou demain mais je ne sais toujour pas comment "tranformer" mon 4.5 volts en 3 volts et je ne possede que des diodes 1N4148
#44064 Robot pour le collège Partie 2
Posté par
sur 30 mai 2012 - 12:27
dans
Aide pour projets scolaire
bon j'ai fait un test pour mon robot en donnant 3V au capteur qui s'allume mais apparament le phototransistor ne recoit rien car il vas tout droit et cela meme si il y a un mur devant donc je ne sait pas vraiment d'ou vien le probleme
#43613 Robot pour le collège Partie 2
Posté par
sur 23 mai 2012 - 04:00
dans
Aide pour projets scolaire
je voudrais telecommander mon robot par infrarouge grace a une telecommande et de pouvoir si possible le passer en mode automatique depuis la telecommande.
J'ai dejas reperé cette telecommande http://www.alpha-cru...0386503894.html qui ma l'air pas mal mais ou il n'y a pas de recepeteur. J'ai trouvé ce recepteur sur le meme site http://www.alpha-cru...0386685545.html mais je le trouve un peut cher pour ce que s'est donc je voudrais le fabriquer mais... Comment ?
J'ai dejas reperé cette telecommande http://www.alpha-cru...0386503894.html qui ma l'air pas mal mais ou il n'y a pas de recepeteur. J'ai trouvé ce recepteur sur le meme site http://www.alpha-cru...0386685545.html mais je le trouve un peut cher pour ce que s'est donc je voudrais le fabriquer mais... Comment ?
#43637 Robot pour le collège Partie 2
Posté par
sur 24 mai 2012 - 08:46
dans
Aide pour projets scolaire
Voila
Fichier(s) joint(s)
-
 fonction telecomande.bmp 924,12 Ko
135 téléchargement(s)
fonction telecomande.bmp 924,12 Ko
135 téléchargement(s)
#43632 Robot pour le collège Partie 2
Posté par
sur 24 mai 2012 - 08:03
dans
Aide pour projets scolaire
ok





{kind=link}