
J’ai exactement ce servo, je vais voir ce que ca donne
Il y a 366 élément(s) pour Budet (recherche limitée depuis 22-juin 13)
 Posté par
sur 13 août 2019 - 08:57
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 13 août 2019 - 08:57
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 13 août 2019 - 04:12
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Ouais j'y avais pensé de faire lever/pivoter l'ensemble mais le problème c'est que je n'ai qu'un petit servo tout pourris pour réaliser cette fonction donc plus trop de choix  Je vais tester cette option et si ça marche pas je changerais
Je vais tester cette option et si ça marche pas je changerais
Pour l'instant je le mettrait à la main, c'est pas aussi simple que sur une imprimante 3D avec des contacteurs parce qu'ils connaissent forcément le sens de rotation pour arriver en buté. Moi c'est plus complexe car c'est la combinaison des deux qui donnent une position donnée et il faut impérativement éviter les collisions entre les bras et/ou le bâtit.
Merci mais niveau design c'est rudimentaire, c'est pour l'instant purement fonctionnel. Une fois que j'aurais enmagaziné suffisamment de connaissance sur le sujet je repartirai de 0 cette fois ci en me filmant histoire d'avoir une vidéo cool et de montrer le processus de conception/réalisation
Posté par
sur 13 août 2019 - 02:52
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 24 juillet 2019 - 05:48
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Oui oui ça avance bien, je finalise la mécanique, j'ai passé un peu de temps à modéliser un train épicycloïdal compact, ce qui est chose faite, je ferais un retour lorsque ma CAO sera complète
Posté par
sur 17 mai 2019 - 04:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je connais bien cette batterie, elle m'a lachée après 5 charges
Posté par
sur 10 mai 2019 - 08:16
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 10 mai 2019 - 06:07
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Ca n'a pas l'air de fonctionner...
Posté par
sur 09 mai 2019 - 10:09
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Quelques petits updates du code :
L'interface graphique sera encore amenée a être modifié par la suite mais je suis satisfait de ce qu'elle est pour le moment et je sens que tout le monde ici veut que je commence à rentrer plus dans le hardware
PS : Comment on fait pour mettre la vidéo en miniature ?
Posté par
sur 07 mai 2019 - 10:07
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
La nouvelle cinématique est au point, toutes les équations fonctionnent, mon code tourne comme sur des roulettes, je n'ai plus qu'à faire une belle petite méca et j'aurais un robot dessinateur fonctionnelle
(Il n'y a pas de changement flagrant entre chaque vidéos/photos que je poste, c'est beaucoup de fiabilisation du code, des maths et de la méthode pour le moment)
Je vais commencer à designer un traceur à mettre en bout de bras, je vais avoir besoin de ressorts 
Posté par
sur 02 mai 2019 - 10:11
dans
Bras robots, pinces, tourelles, et autres manipulateurs
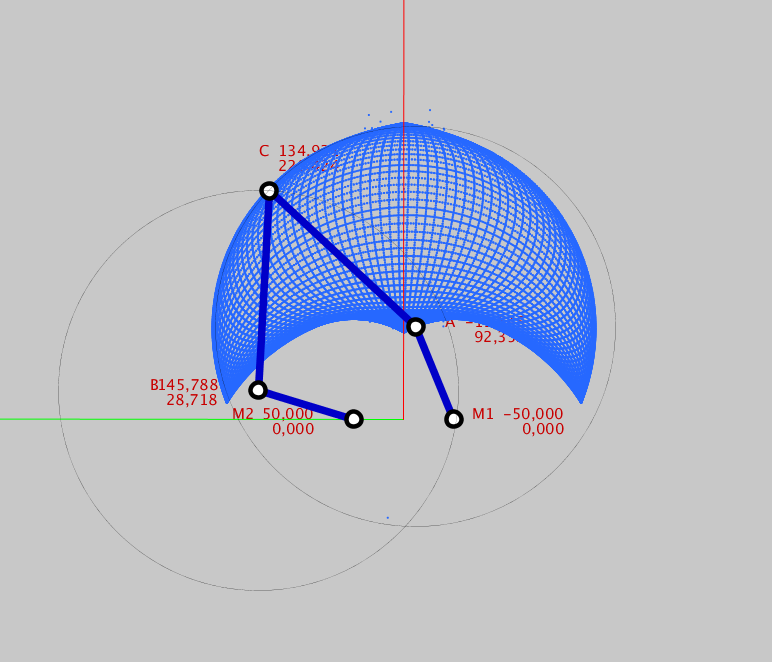
Bonjour,
Le développement cinématique de la nouvelle mécanique avance, ainsi que le modèle numérique pour la simulation
Voilà ce que j'ai rapidement tracé en jouant avec des cos et sin :
Posté par
sur 27 avril 2019 - 01:19
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Aujourd'hui petit bricolage rapide afin de tester le couplage Processing/Arduino. L'idée ici est de faire communiquer mon arduino avec une interface graphique codée sur mesure.
J'ai rapidement codé un rectangle vert qui s'allonge ou rétracte en fonction de ce que mesure le capteur ultrason. Tout cela est réaliser grâce à la communication série.
Je veux pouvoir simuler sur mon ordinateur (vidéos que j'ai postées ici) ce que fera le robot sur papier, ça permet premièrement de travailler plus vite car on peut simuler beaucoup de chose sans avoir à passer sur le robot directement.
Deuxièmement, ça permet aussi d'avoir toute la partie "gros calcul" sur l'ordinateur et d'envoyer seulement les résultats à l'arduino et donc avoir un programme vachement plus simple.
Si vous avez des questions n'hésitez pas
Posté par
sur 25 avril 2019 - 08:32
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour à tous,
Petit coup de mou avec ce week end de Pâques je devrais mieux avancer les jours qui viennent !
Voici en photo et vidéo mes maigres avancement :

Objectifs :
Ensuite, dans un second temps :
Voilà le programme
Posté par
sur 20 avril 2019 - 04:13
dans
Bric-à-brac
Posté par
sur 09 avril 2019 - 12:10
dans
Bras robots, pinces, tourelles, et autres manipulateurs
jai mes techniques
Posté par
sur 09 avril 2019 - 11:10
dans
Bras robots, pinces, tourelles, et autres manipulateurs
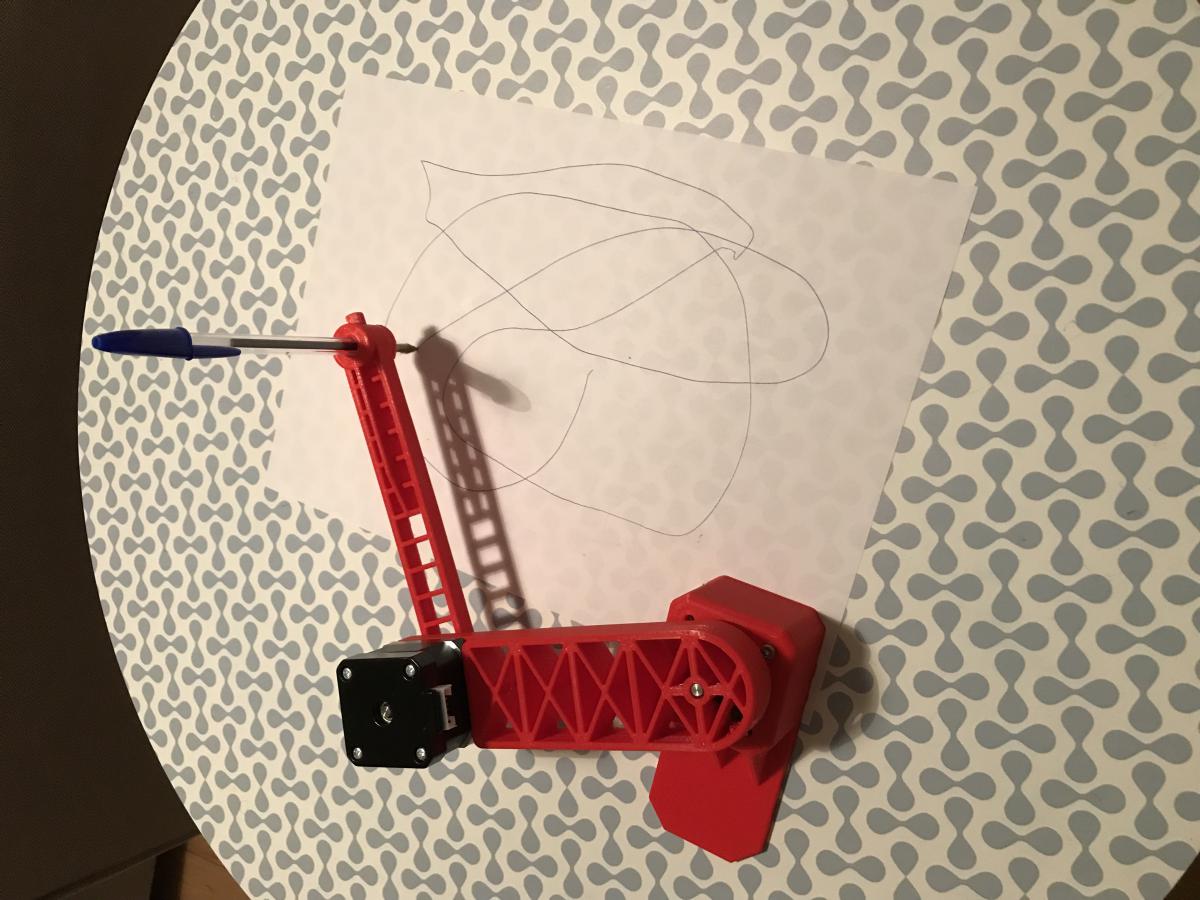
Résultat en image ce matin :

Posté par
sur 08 avril 2019 - 07:45
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 07 avril 2019 - 07:54
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 07 avril 2019 - 07:09
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Yes ça sera inclus dans les prochaines versions (mon poste processeur prend déjà en compte les déplacements G0 et G1 donc pas de soucis la dessus )
Posté par
sur 06 avril 2019 - 09:50
dans
Bras robots, pinces, tourelles, et autres manipulateurs
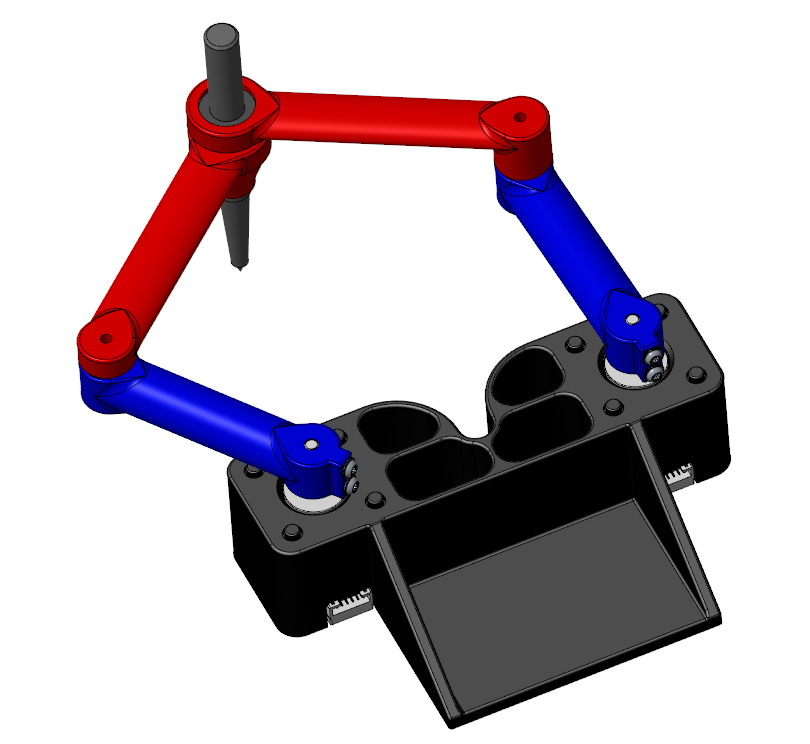
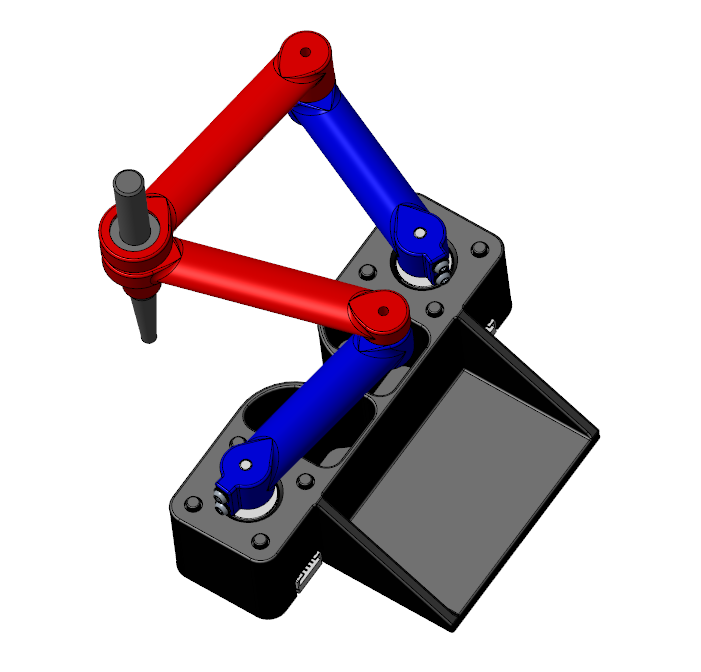
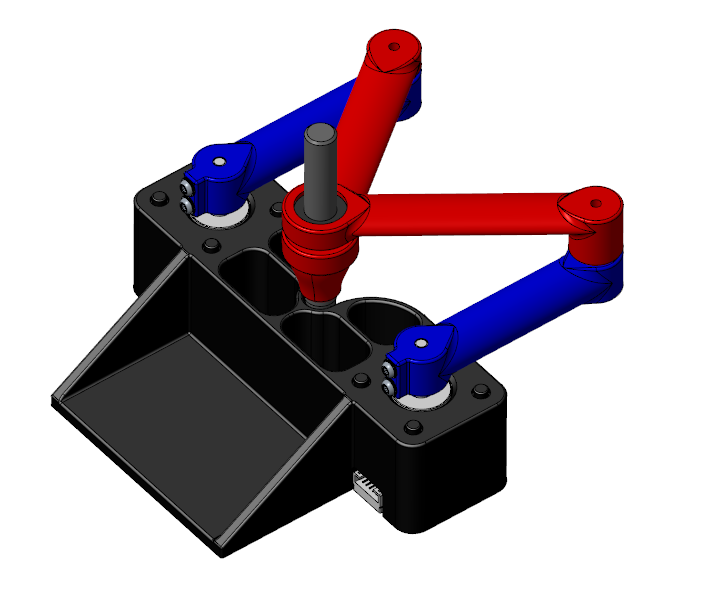
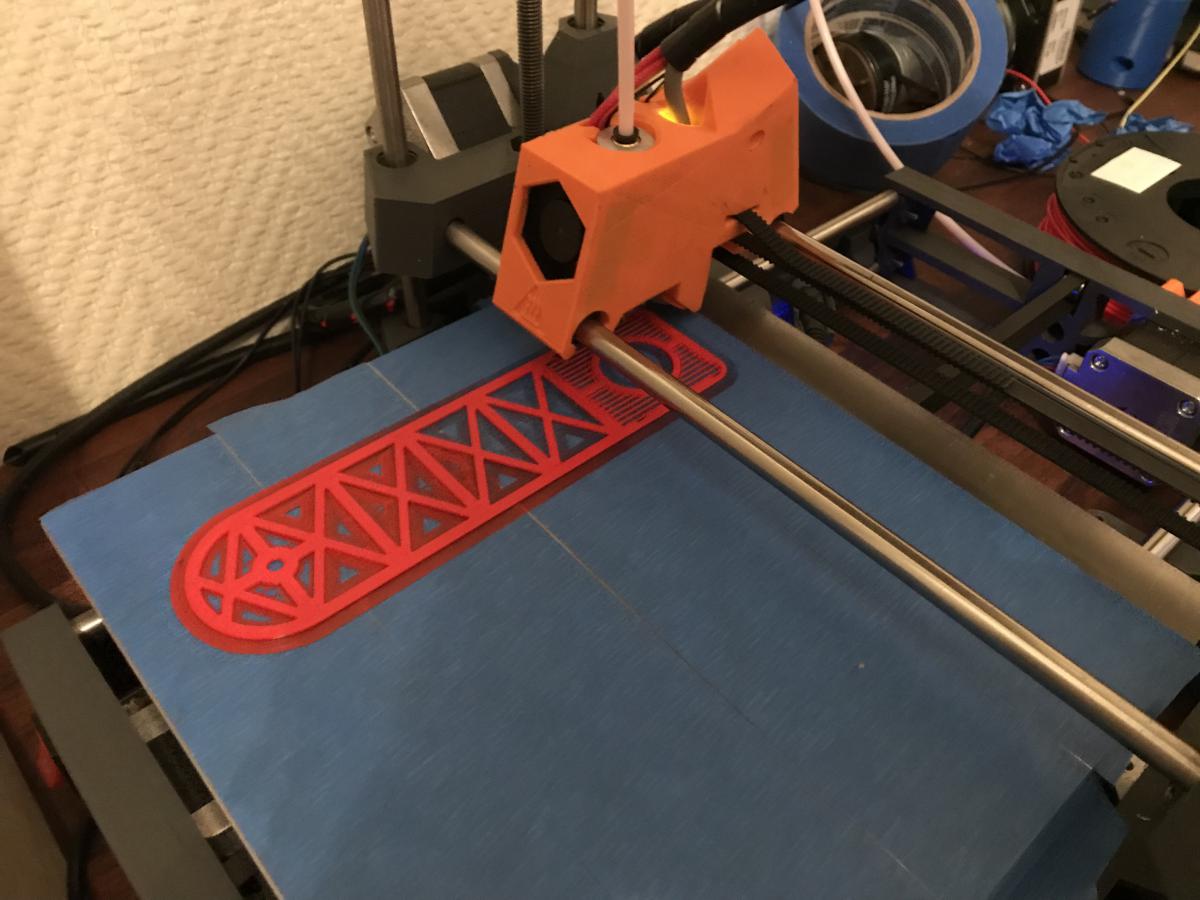
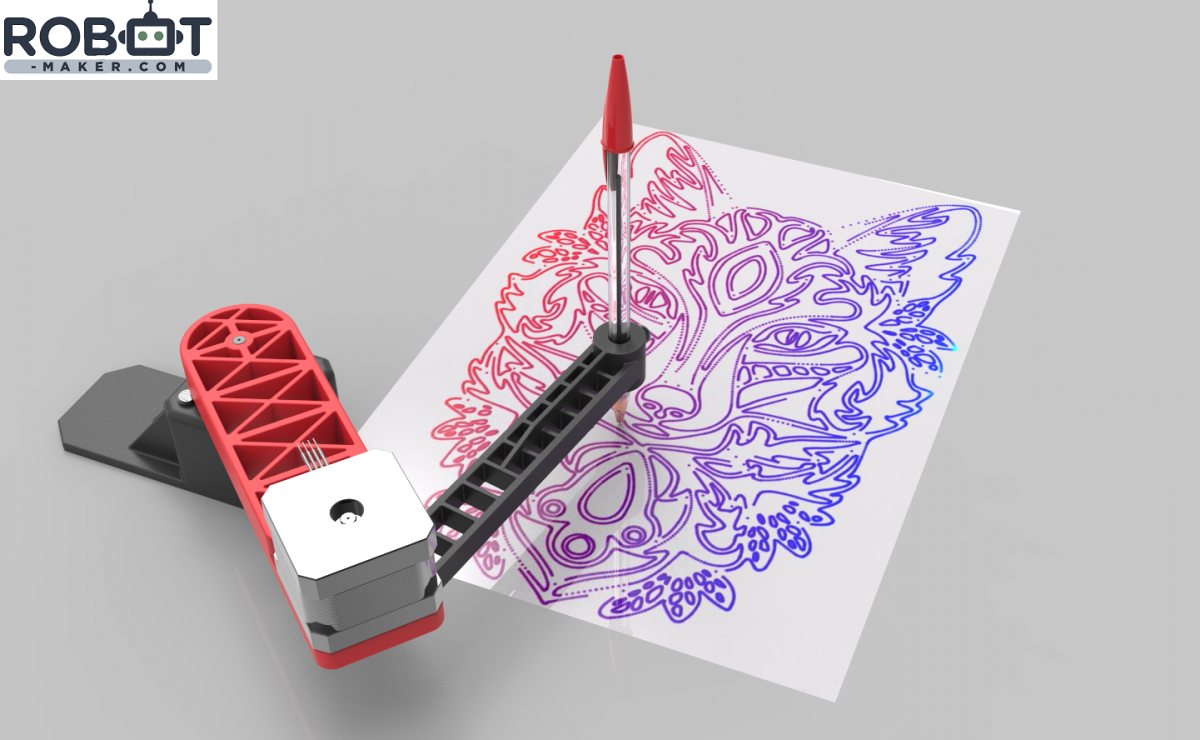
J'ai du coup commencé à travailler sur une première version proto du traceur avec des pièces à la va vite pour pouvoir tester mon post processeur et mettre en place l'architecture électronique/code du système.
L'impression des pièces devrait commencer demain, je vous laisse avec un rendu et une vidéo du mécanisme
Posté par
sur 06 avril 2019 - 12:07
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour à tous,
Premièrement je souhaite remercié Mike118 de m'avoir proposer un partenariat afin de financer une partie du robot ! J'ai commandé mes pièces jeudi midi et je les ai reçu ce matin, ils sont rapide chez robot maker
Tout était super bien emballé je vais pouvoir commencer la réalisation physique du bras aujourd'hui, je vais tenter un accouplement mécanique direct sans réduction voir ce que ça donne dans un premier temps.

Posté par
sur 03 avril 2019 - 07:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Yes ! J'y réfélchis et je vous dit
Par contre la section de vos profilés mon semble pas suffisante (vous allez avoir de la flexion sur vos pièces)
et il vous manque un DDL par jambe (rotation suivant x)
Posté par
sur 03 avril 2019 - 07:18
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 02 avril 2019 - 09:28
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Re,
J'ai travaillé sur une nouvelle cinématique de bras ce soir, je réfléchis encore même si je pense que la première cinématique serait la plus simple à mettre en oeuvre.
J'aime beaucoup travailler la couleur et j'aimerai créer un traceur qui me permettrait de créer des dégrader comme sur mes vidéos, il va falloir que je trouve quelque chose de simple à mettre en oeuvre
Posté par
sur 02 avril 2019 - 06:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu peux aussi juste réduire le taux de remplissage non ? sinon oui baisse l'épaisseur
Posté par
sur 02 avril 2019 - 02:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je suis complètement d'accord, d'ailleurs je voulais m’atteler à ce point ce soir. Ca et "smoother" les déplacement linéaire en discrétisant mes vecteurs et pouvoir choisir cette valeur




