Bonjour à tous,
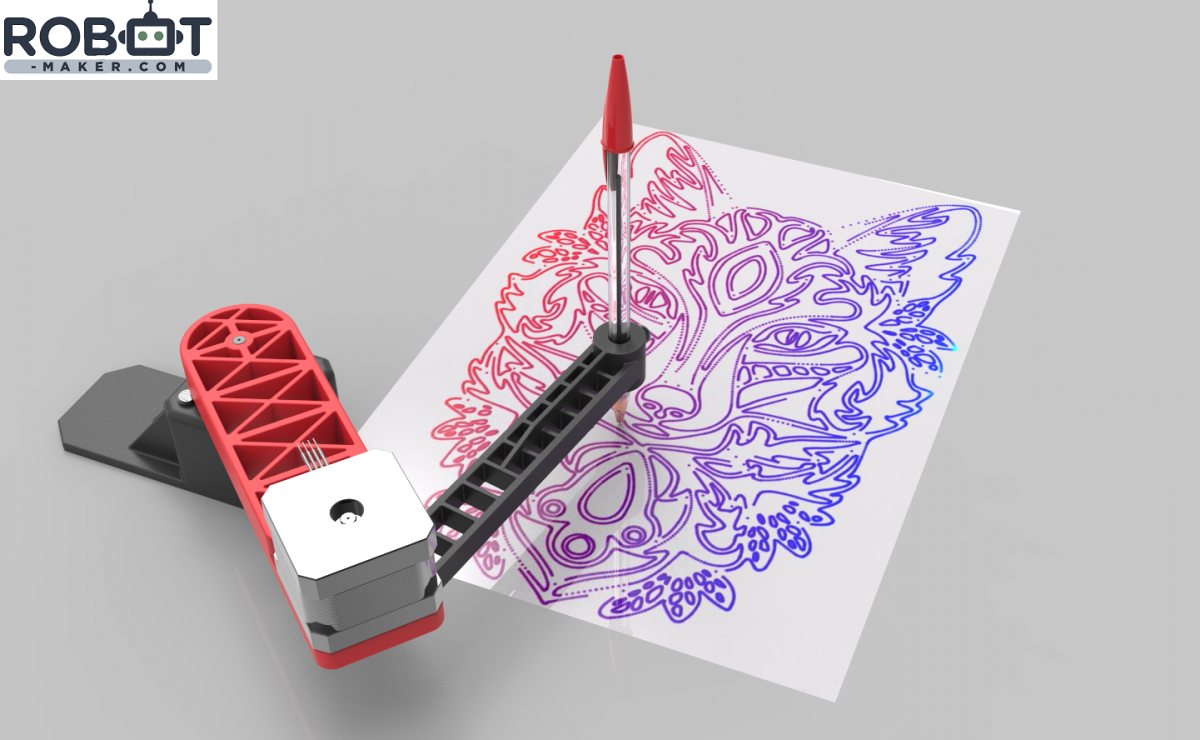
Dernièrement j'ai réfléchis à l'idée de réaliser un traceur avec un bras robot (idée de projet qui me trotte dans la tête depuis quelque temps).
J'ai donc commencé à écrire les équations de cinématique inverse d'un bras avec 2 DDL suivant Z afin de relier les coordonnées cartésiennes d'un ensemble de point (composant un dessin par exemple) en un angle alpha et beta qui correspond aux angles de mes moteurs.
J'ai ensuite codé un post processeur associé couplé à une petite interface graphique homemade afin de simuler tout ça en amont avant même de sortir un robot. (Je procède beaucoup comme ça, je code sous processing je vous le recommande c'est génial pour tester ses idées)
Je me suis essayé à un premier dessin je vous laisse juger du résultat :
Du coup, je n'ai plus qu'a fabriquer un robot avec deux moteurs pas à pas et le tour est, normalement joué 
Je vais utiliser deux de ces moteurs : http://cnc25.free.fr/documentation/moteurs%20pap/pap_nmb.pdf
(23LM-K202-P4W)
Je vous tiens au jus