Sauf que les différents matériaux étaient pour la plupart de même couleur donc le panachage des matières n'était pas trop visible… Et puis je voulais le faire de cette couleur. Si ça peut te "rassurer" certaines pièces resteront brutes.
Contenu de XB2000
Il y a 79 élément(s) pour XB2000 (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#113116 Terminatosaurus Rex
 Posté par
sur 04 mars 2021 - 01:24
dans
Tête de robots, humaine ou animale, animatronique
Posté par
sur 04 mars 2021 - 01:24
dans
Tête de robots, humaine ou animale, animatronique
#113104 Terminatosaurus Rex
Posté par
sur 02 mars 2021 - 06:11
dans
Tête de robots, humaine ou animale, animatronique
Fin de semaine dernière j'ai reçu mes pièces pour compléter la mâchoire, après un coup de peinture :



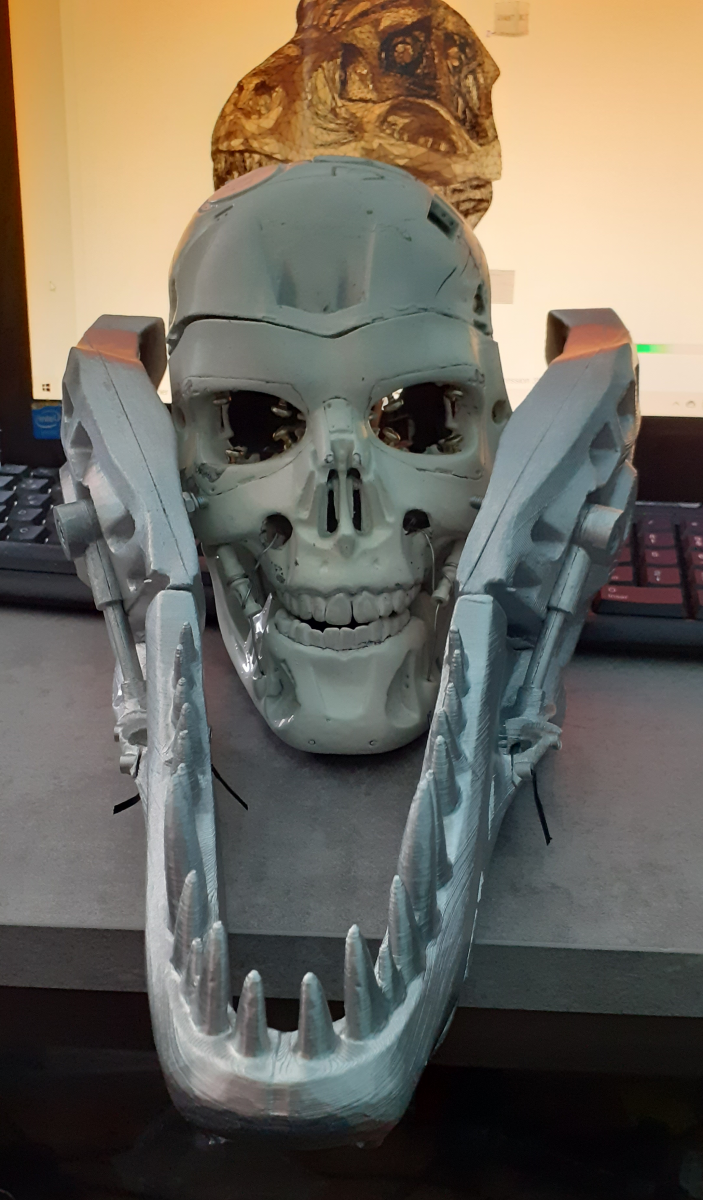
Je vais essayer d'intégrer le haut-parleur dans la première vertèbre du cou :
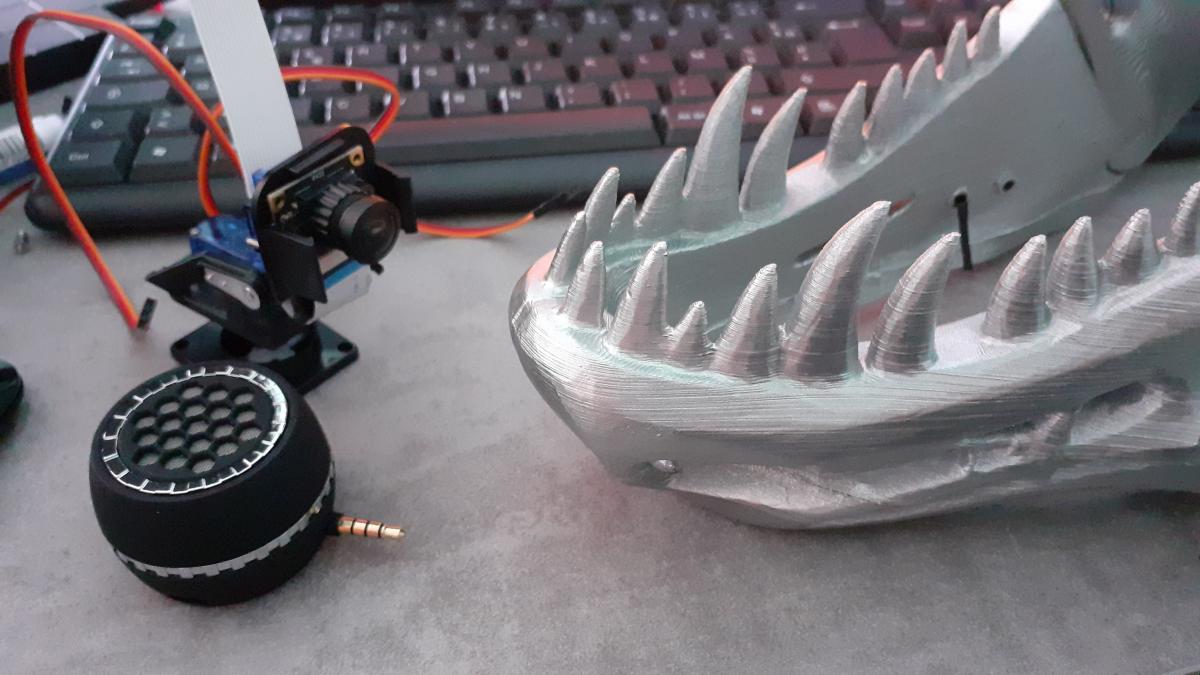
Et le montage avec la caméra va me permettre de commencer la programmation du Raspberry.
#113119 Terminatosaurus Rex
Posté par
sur 05 mars 2021 - 07:28
dans
Tête de robots, humaine ou animale, animatronique
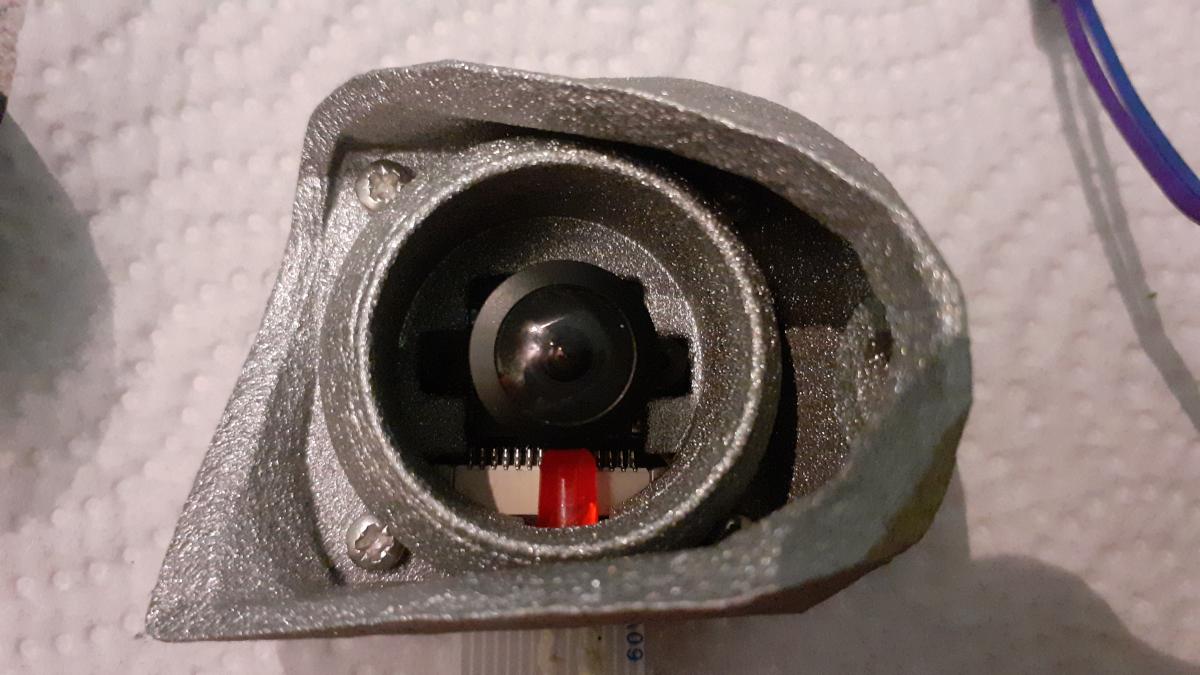
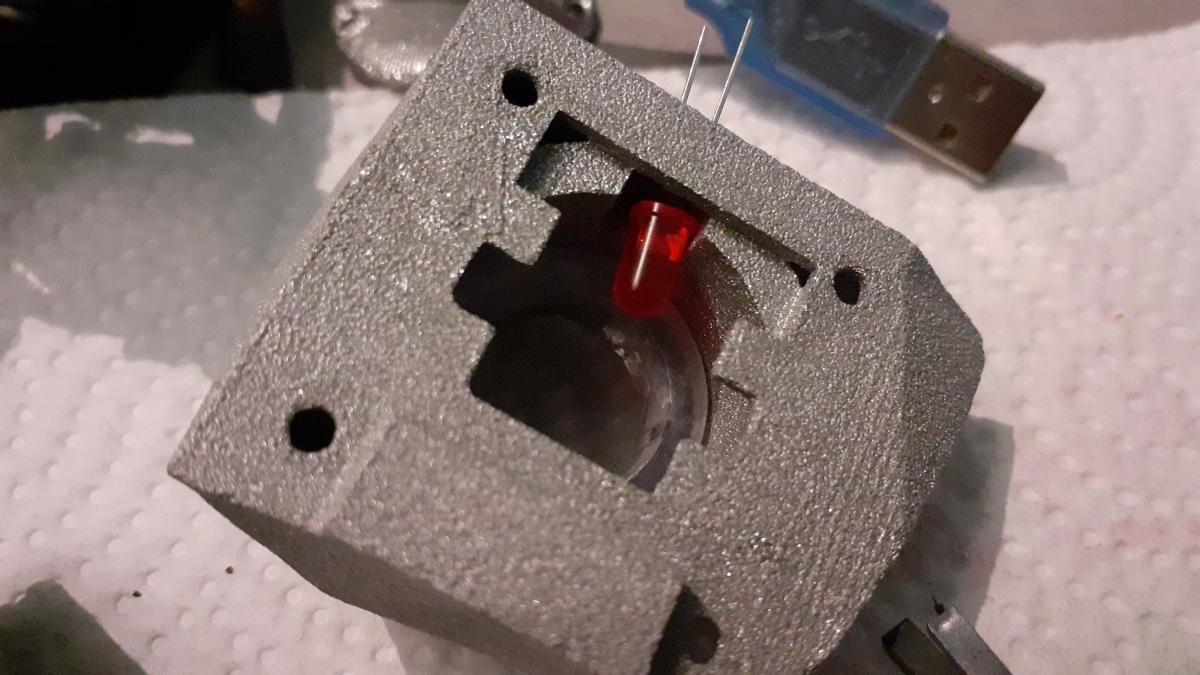
J'ai reçu les yeux :
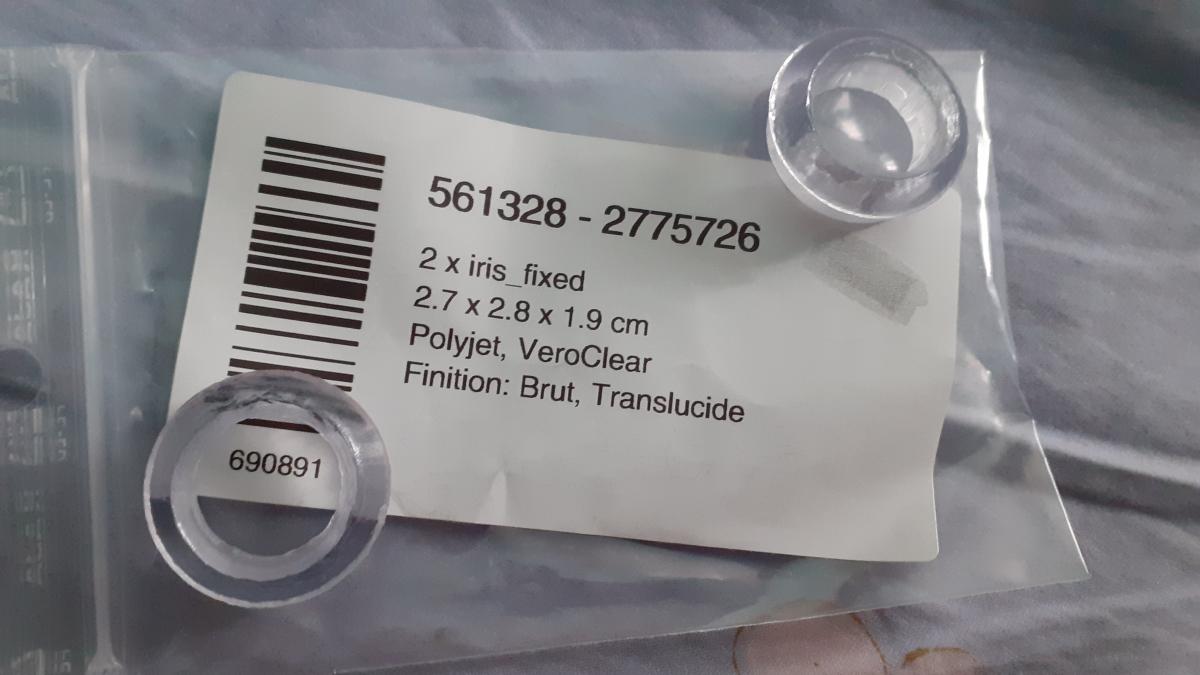


Testé vite fait avec mon Arduino, je mettrai de la feuille d'aluminium au fond de l'œil pour mieux réfléchir la lumière.


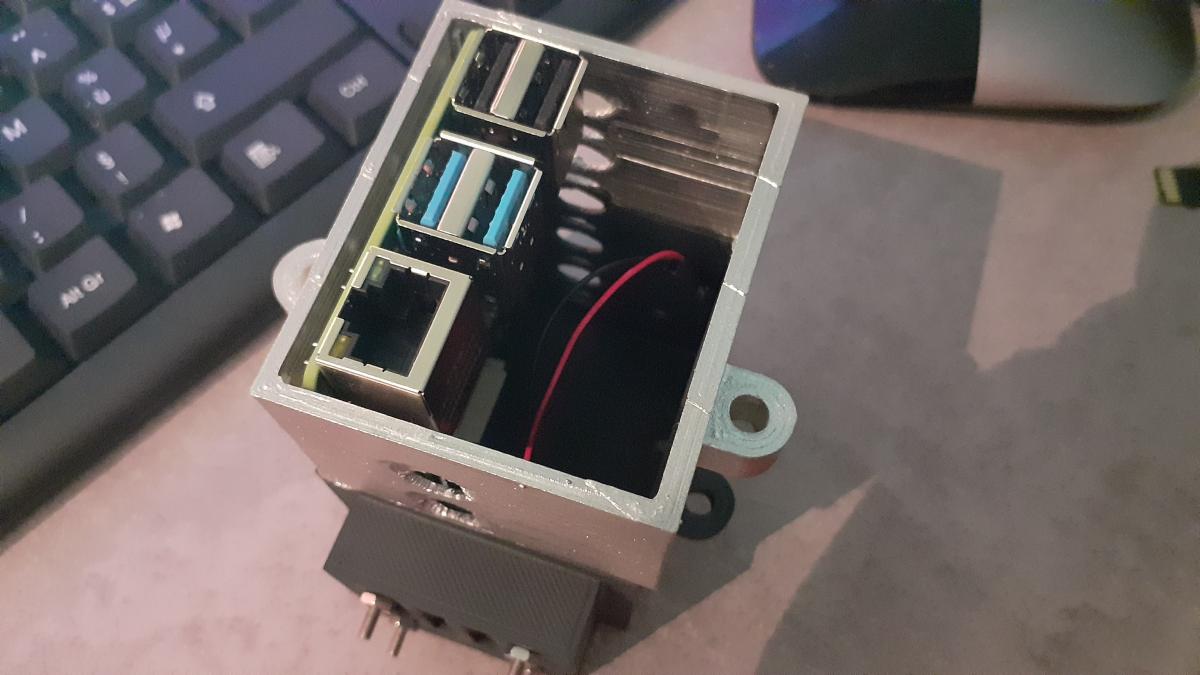
J'ai aussi le boitier pour le Raspberry :



#113238 Terminatosaurus Rex
Posté par
sur 30 mars 2021 - 11:17
dans
Tête de robots, humaine ou animale, animatronique
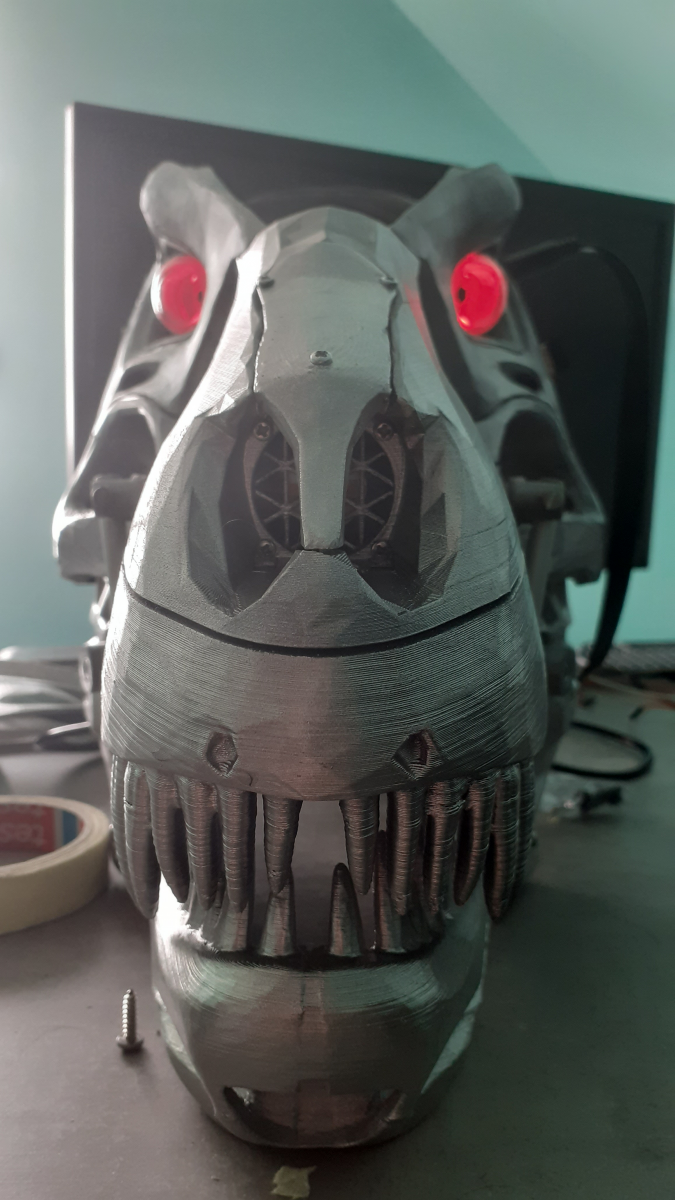
"Petit" avancement :






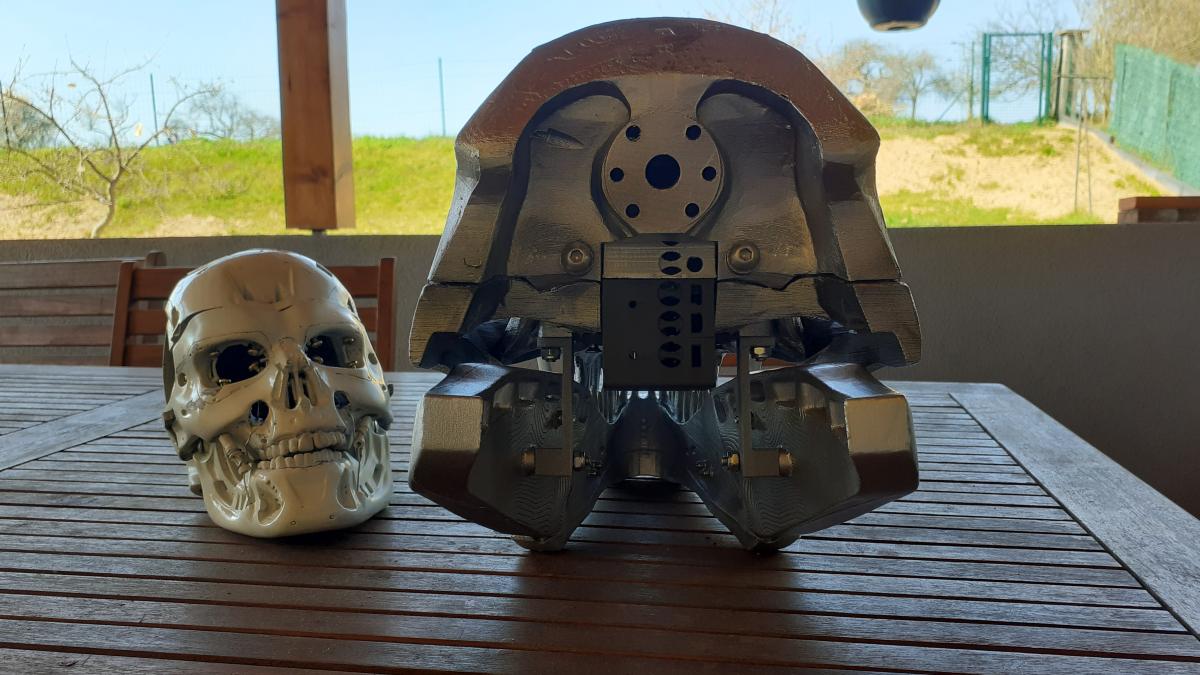
Je rappel que la tête de T-800 est à échelle 1...


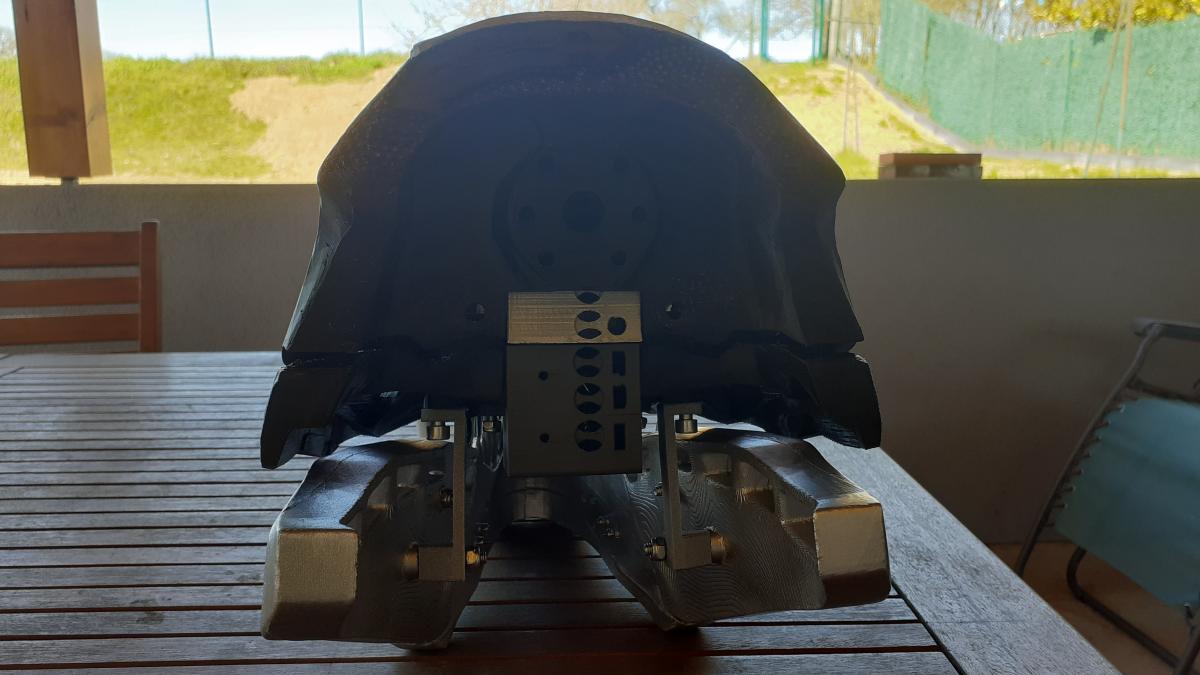

Ajustement du couvercle sur la boite crânienne.

Il faut ajuster les pièces du crâne. La partie haute est en PLA, la partie basse en PETG et la boite crânienne en ABS (c'est elle qui va supporté le poids de la tête).

Une fois ajuster les trous tombent en face.



Bizarrement la pièce en PLA est légèrement trop courte, ce qui m'oblige de la repercer.

Et enfin après peinture :



Un beau bébé de 1,9 kg...
Et dire que ce n'est qu'un début.




#115011 Terminatosaurus Rex
Posté par
sur 28 décembre 2021 - 03:40
dans
Tête de robots, humaine ou animale, animatronique
Petite avancée :

Le mécanisme fonctionne comme je voulais. Sauf que le servo peut maintenir la gueule fermée, mais a du mal à la refermer. Normalement Mercredi je reçois un servo plus coupleux pour arranger ça.
J'ai aussi commencé sa partie chatbot histoire de lui faire dire des choses. Je comprends comment en faire un simple.
Pour les données du chatbot je vais prendre ça dans un premier temps :


Et j'ai aussi fais une bête recherche "questions les plus répandues" pour pouvoir mettre en forme les données.
Je suis fan de Michel Audiard, je rajouterai d'autres film dialogués par lui plus tard comme "Un singe en hiver" ou "100 000 dollars au Soleil" (un de mes films préférés). Pour simplifier le travail j'ai récupéré les fichiers sous-titres des films. Ça prendrait pas mal de temps de tout retranscrire à la main. L'inconvénient c'est que les sous-titres ne correspondent pas tout à fait à ce qui est dit dans les films. Je corrigerai les répliques les plus cultes.
Après je lui mettrais des fonctions d'assistant vocal genre quel est la météo, etc...
Le mécanisme fonctionne comme je voulais. Sauf que le servo peut maintenir la gueule fermée, mais a du mal à la refermer. Normalement Mercredi je reçois un servo plus coupleux pour arranger ça.
J'ai aussi commencé sa partie chatbot histoire de lui faire dire des choses. Je comprends comment en faire un simple.
Pour les données du chatbot je vais prendre ça dans un premier temps :
Et j'ai aussi fais une bête recherche "questions les plus répandues" pour pouvoir mettre en forme les données.
Je suis fan de Michel Audiard, je rajouterai d'autres film dialogués par lui plus tard comme "Un singe en hiver" ou "100 000 dollars au Soleil" (un de mes films préférés). Pour simplifier le travail j'ai récupéré les fichiers sous-titres des films. Ça prendrait pas mal de temps de tout retranscrire à la main. L'inconvénient c'est que les sous-titres ne correspondent pas tout à fait à ce qui est dit dans les films. Je corrigerai les répliques les plus cultes.
Après je lui mettrais des fonctions d'assistant vocal genre quel est la météo, etc...
#114958 Terminatosaurus Rex
Posté par
sur 21 décembre 2021 - 08:41
dans
Tête de robots, humaine ou animale, animatronique
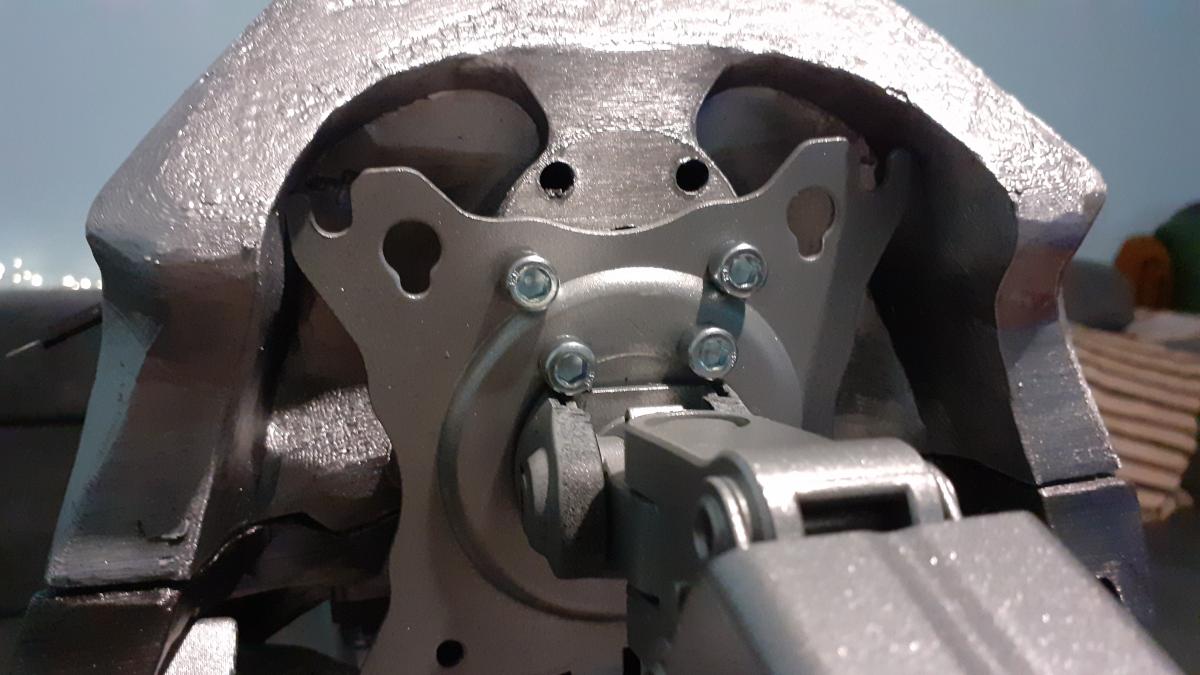
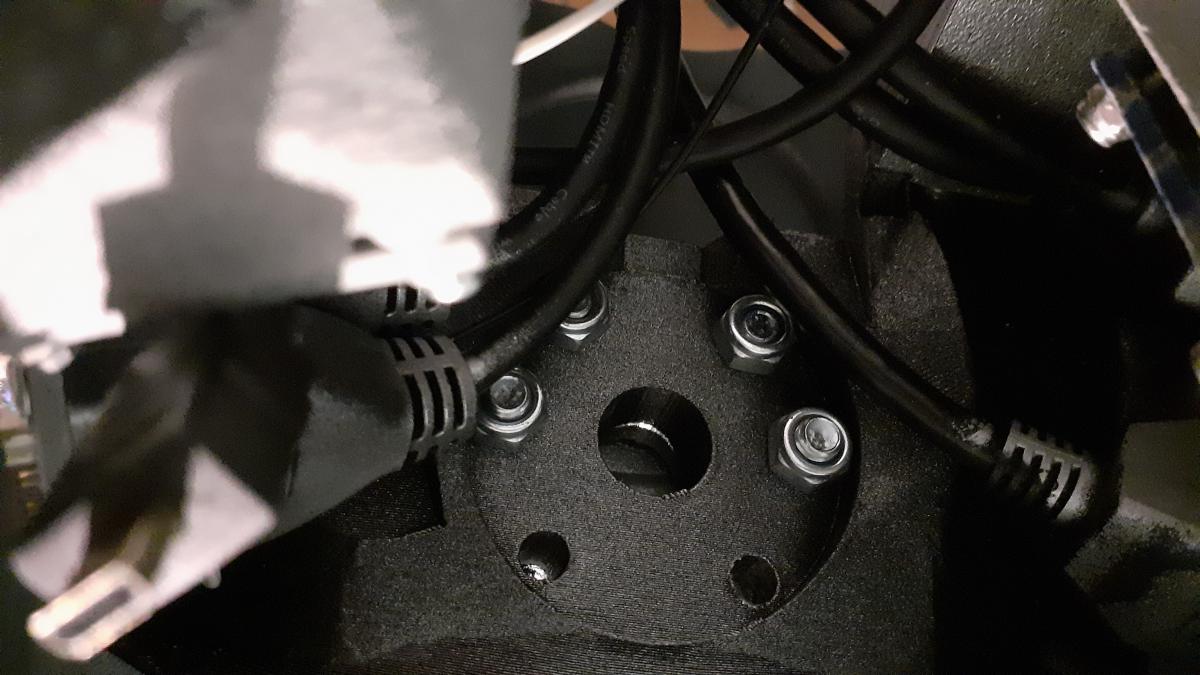
Ça fait des lustres que je n'ai pas donné de nouvelles. Au final je vais d'abord le faire parler un peu avant de vraiment le faire voir.
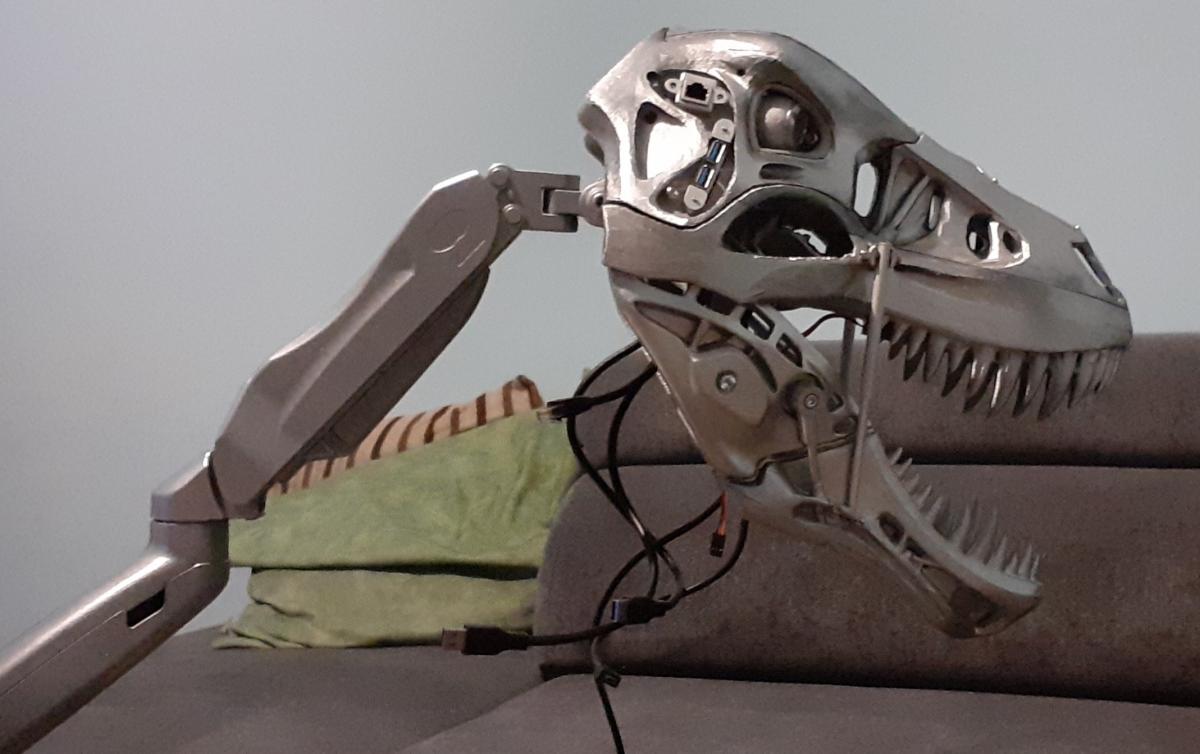
Je lui avais conçu un cou mais j'en étais pas satisfait. J'ai cherché un bras pour lui servir de cou. Mais les bras pouvant porter de 2 à 4kg me paraissent trop chères. J'ai regardé ensuite les tractopelles/excavateur pour enfants. Mais les bras ne peuvent pas pivoter et le véhicule est trop encombrant pour moi pour l'instant.
J'ai enfin trouvé ce qui est parfait pour moi. Un bras support d'écran. Le modèle que j'ai pris supporte 6kg et c'est peu chère.
Vidéo bientôt
Image(s) jointe(s)


#115803 Terminatosaurus Rex
Posté par
sur 28 avril 2022 - 09:28
dans
Tête de robots, humaine ou animale, animatronique
Petit test.
Dans la phrase qu'on lui donne elle cherche le verbe, sujet et complément puis exécute le code correspondant. Ensuite elle compte le nombre de syllabes dans sa réponse pour faire bouger sa gueule.
#113013 Terminatosaurus Rex
Posté par
sur 17 février 2021 - 02:00
dans
Tête de robots, humaine ou animale, animatronique
Nouvelles pièces :




#109353 Mon Gamin, un Terminator T-800
Posté par
sur 07 mai 2020 - 06:51
dans
Tête de robots, humaine ou animale, animatronique
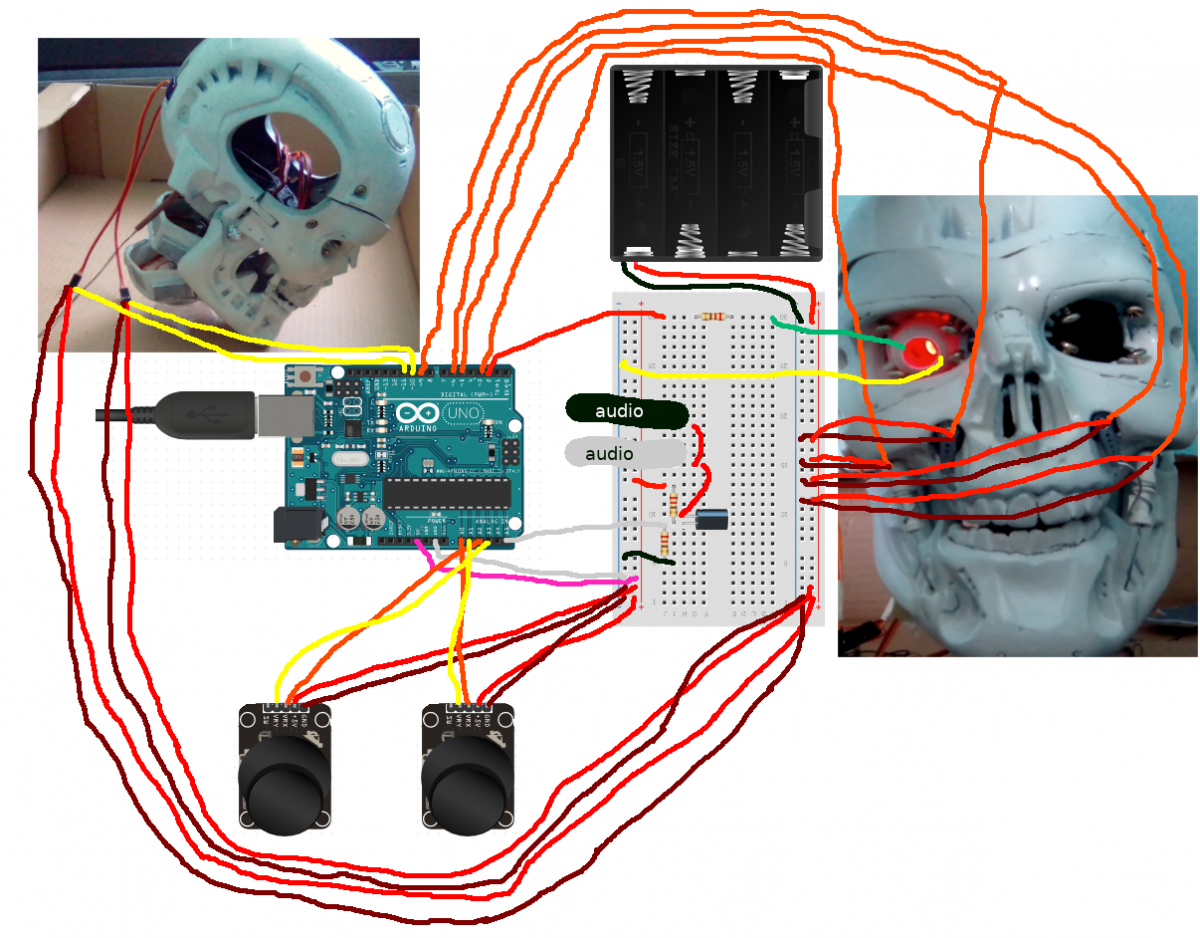
L'audio c'est des prises Jack branché sur la platine de prototypage et dont un des canaux est relié à l'Arduino (je sors le montage de ce forum : https://forum.arduin...?topic=476900.0)
Donc les Joystick et la DEL sont sur l'alimentation de l'Arduino, les servo-moteurs sont alimentés par quatre piles 1,5 V.
Code Arduino pour faire bouger la machoire et le cou avec les joysticks (donc vidéo "Test servos" du premier message) :
#include<Servo.h>
/* Créer un objet Servo pour contrôler le servomoteur */
Servo MVD; /* machoire vertical droit */
Servo MVG; /* vertical gauche */
Servo MHD; /* machoire horizontal droit */
Servo MHG; /* horizontal gauche */
Servo C1; /* cou 1 */
Servo C2;/* cou 2*/
int Mx_axis;
int My_axis;
int Cx_axis;
int Cy_axis;
int MVD_val;
int MVG_val;
int MHD_val;
int MHG_val;
int C1_val;
int C2_val;
// Définition de la constante
const int broche2 = 2; // Définition de la broche numéro 2.
void setup()
{
pinMode(A0,INPUT);
pinMode(A1,INPUT);
pinMode(A2,INPUT);
pinMode(A3,INPUT);
pinMode(broche2, OUTPUT); // Intialisation de la broche numéro 2 (numérique).
// Attache le servomoteur à la broche
MVD.attach(6); /* machoire vertical droit */
MVG.attach(5); /* vertical gauche */
MHD.attach(9); /* machoire horizontal droit */
MHG.attach(3); /* horizontal gauche */
C1.attach(10); /* cou */
C2.attach(11); /* cou */
}
void loop()
{
digitalWrite(broche2, HIGH); // Etat logique haut 1 (5 volts)
Mx_axis=analogRead(A0);
My_axis=analogRead(A1);
Cx_axis=analogRead(A2);
Cy_axis=analogRead(A3);
MVD_val=map(Mx_axis,512,1023,0,180);
MVG_val=map(Mx_axis,512,1023,180,0);
MHD_val=map(My_axis,0,1023,105,70);
MHG_val=map(My_axis,0,1023,120,80);
C1_val=map(Cx_axis,0,1023,0,180);
C2_val=map(Cx_axis,0,1023,0,180);
MVD.write(MVD_val);
MVG.write(MVG_val);
MHD.write(MHD_val);
MHG.write(MHG_val);
C1.write(C1_val);
C2.write(C2_val);
}
Code Arduino machoire asservie à la prise Jack (les deux vidéos de mon message précédent), j'ai repris et modifié un code pour le robot InMoov : https://quai-lab.com...obot-humanoide/
// --------------------------------------
// Seb last change 28/08/2016
//
// Synchronize InMoov mouth with Audio voice
// IN : Audio signal from PC/tablet...
// OUT : Servo PWM
// -------------------------------------
#include <Servo.h>
Servo MHD; /* machoire horizontal droit */
Servo MHG; /* horizontal gauche */
Servo C1;
Servo C2;
int My_axis;
int Cx_axis;
int Cy_axis;
int MHD_val;
int MHG_val;
int C1_val;
int C2_val;
// Définition de la constante
const int broche2 = 2; // Définition de la broche numéro 2.
/* Sampling parameters */
uint32_t _interval; /* Interval between two consecutive ADC reading cycles in us */
const uint16_t _frequency=8000;
uint32_t _lastTime;
const uint16_t _samples=64;
uint8_t _vData[_samples];
uint8_t _bufferIndex =0;
// --- for servo mouth ---
Servo mouthServo;
int mouthPos;
Servo mouthServo1;
int mouthPos1;
#define AUDIO_PIN 5 // Pin for audio signal analog pin A0 ... AX
#define MOUTH_PIN 6 // Pin for Servo Motor
#define MOUTH_PIN1 5 // Pin for Servo Motor
// --- My InMoov Airwin parameter : need to be change for your InMoov else can break something...
#define MOUTH_MIN 0 // Servo pos mouth close min
#define MOUTH_MAX 180 // Servo pos mouth max open
#define MOUTH_MIN1 180 // Servo pos mouth close min
#define MOUTH_MAX1 0 // Servo pos mouth max open
// Auto-calibration de la plage RMS max (depend on the volume, audio signal etc...)
uint16_t rmsMax=0;
uint16_t rmsMin=500;
unsigned long startMillis;
void setup(void)
{
pinMode(A1,INPUT);
pinMode(A2,INPUT);
pinMode(A3,INPUT);
My_axis=analogRead(A1);
Cx_axis=analogRead(A2);
Cy_axis=analogRead(A3);
pinMode(broche2, OUTPUT); // Intialisation de la broche numéro 2 (numérique).
// Attache le servomoteur à la broche
MHD.attach(9); /* machoire horizontal droit */
MHG.attach(3); /* horizontal gauche */
C1.attach(10); /* cou */
C2.attach(11); /* cou */
// calcul la durée des intervals en us F = 1 / t => t = 1 / F en secondes => x 1000 000 pour les us
_interval=1000000/_frequency;
/* Initialize the ADC */
InitADC(AUDIO_PIN);
mouthServo.write(MOUTH_MIN); // Bouche fermée au démarrage
mouthServo.attach(MOUTH_PIN);
delay(30);
mouthServo1.write(MOUTH_MIN1); // Bouche fermée au démarrage
mouthServo1.attach(MOUTH_PIN1);
delay(30);
/* Console */
Serial.begin(115200);
}
void loop(void)
{
task_jaw();
task_led();
/*task_joystick();*/
}
void task_jaw () {
startMillis=millis();
AcquireData();
uint16_t rms = ComputeRMS();
uint16_t smooth = rms;
// Detach if 2 second without mouth move +2 for small noise...
if (smooth<(rmsMin+2) && (millis()-startMillis>2000)) {
mouthServo.detach();
// Serial.println("detach");
mouthServo1.detach();
// Serial.println("detach");
} else {
if (!mouthServo.attached()) mouthServo.attach(MOUTH_PIN);
mouthPos=map(smooth,rmsMin,rmsMax,MOUTH_MIN, MOUTH_MAX);
mouthServo.write(mouthPos);
if (!mouthServo1.attached()) mouthServo1.attach(MOUTH_PIN1);
mouthPos1=map(smooth,rmsMin,rmsMax,MOUTH_MIN1, MOUTH_MAX1);
mouthServo1.write(mouthPos1);
Serial.println(millis()-startMillis);
startMillis=millis();
// Serial.print("Servo=");Serial.println(mouthPos);
}
//Serial.println(smooth);
//Serial.print("Rmsmin=");Serial.print(rmsMin);Serial.print("Rmsmax=");Serial.println(rmsMax);
}
void AcquireData() {
_lastTime = micros();
for(uint16_t i=0;i<_samples;i++) {
while ((micros() - _lastTime) < _interval);
_vData[i]=ADCRead();
_lastTime+=_interval;
}
}
/* Initilalize analog read in fast mode and low resolution */
uint8_t InitADC(uint8_t channel)
{
/* Reset register contents */
ADCSRA = 0;
ADCSRB = 0;
ADMUX = 0;
/* Set voltage reference */
// comment to go to 3.3 Volt ref or 5Volt
ADMUX |= (1 << REFS0) | (1 << REFS1); /* INTERNAL 1.1 V */
/* left align ADC value to 8 bits from ADCH register */
ADMUX |= (1 << ADLAR);
/* Set channel */
ADMUX |= channel;
/* Set pre-scaler */
ADCSRA |= (1 << ADPS1);
/* Enable ADC */
ADCSRA |= (1 << ADEN);
/* Start first conversion */
ADCSRA |= (1 << ADSC);
/* Wait for conversion */
while (ADCSRA & (1 << ADSC));
}
uint16_t ComputeRMS() {
// compute average
uint32_t average=0;
for(uint16_t i=0;i<_samples;i++) {
average+=_vData[i];
}
average/=_samples;
//compute pseudo rms
uint32_t rms=0;
for(uint16_t i=0;i<_samples;i++) {
if (_vData[i]>=average) {
rms+=(_vData[i]-average);
} else {
rms+=(average-_vData[i]);
}
rms= ((rms * 500) / _samples);
// keep min / max for RMS value (needed to map on servo angle)
rmsMax=max(rms,rmsMax);
rmsMin=min(rms,rmsMin);
return(rms);
}
}
/* Simple analog to digital conversion */
uint8_t ADCRead(void)
{
/* Start conversion */
ADCSRA |= (1 << ADSC);
/* Wait for conversion */
while (ADCSRA & (1 << ADSC));
/* Returned ADC value */
return(ADCH);
}
void task_led() {
digitalWrite(broche2, HIGH); // Etat logique haut 1 (5 volts)
}
void task_joystick() {
MHD_val=map(My_axis,0,1023,105,70);
MHG_val=map(My_axis,0,1023,120,80);
C1_val=map(Cx_axis,0,1023,0,180);
C2_val=map(Cx_axis,0,1023,0,180);
MHD.write(MHD_val);
MHG.write(MHG_val);
C1.write(C1_val);
C2.write(C2_val);
}
Avec ce code-ci les joysticks ne marchent pas, j'ai pas trouvé ce qui bloque...
Prochainement je vais modifier le montage. Je vais modifier la cinématique du cou (j'avais mis deux servos tirant des fils pour simuler des pistons, mais le résultat est pas bien terrible) et tester de lui faire bouger la machoire en JawDuino : http://buttonbanger.com/?page_id=137
Pour voir si c'est plus satisfaisant que mon système précédent avec la prise Jack directement connecté en entré d'Arduino.
#109218 Mon Gamin, un Terminator T-800
Posté par
sur 02 mai 2020 - 07:11
dans
Tête de robots, humaine ou animale, animatronique
On verra bien, pour encore un bon moment il sera statique.
Petits test :
Plus de détails plus tard.
#109204 Mon Gamin, un Terminator T-800
Posté par
sur 02 mai 2020 - 03:02
dans
Tête de robots, humaine ou animale, animatronique
Merci, je connaissais déjà cette chaîne, elle est très intéressante, c'est bon à savoir par contre que l'auteur n'est pas loin ^^
quand j'ai commencé à lire je me suis dit "haha aucune chance c'est bien trop poussé" puis j'ai vu que tu avais déjà commencé et ça à l'air tellement chouette!
Merci, c'est pour ça que j'ai bien diviser sa construction, car c'est très poussé dit comme ça, mais si on arrive à décomposer en étapes plus simples, ça devient possible.
Comme je dis souvent :
Il faut croire en soit et ne jamais laisser qui que ce soit se convaincre que quelque chose est impossible. Car il n'y a que vous qui puissiez choisir d'échouer, car échouer c'est abandonner avant de réussir.
Certes un projet peut prendre du temps, parfois des années, mais la persévérance ça paye =).
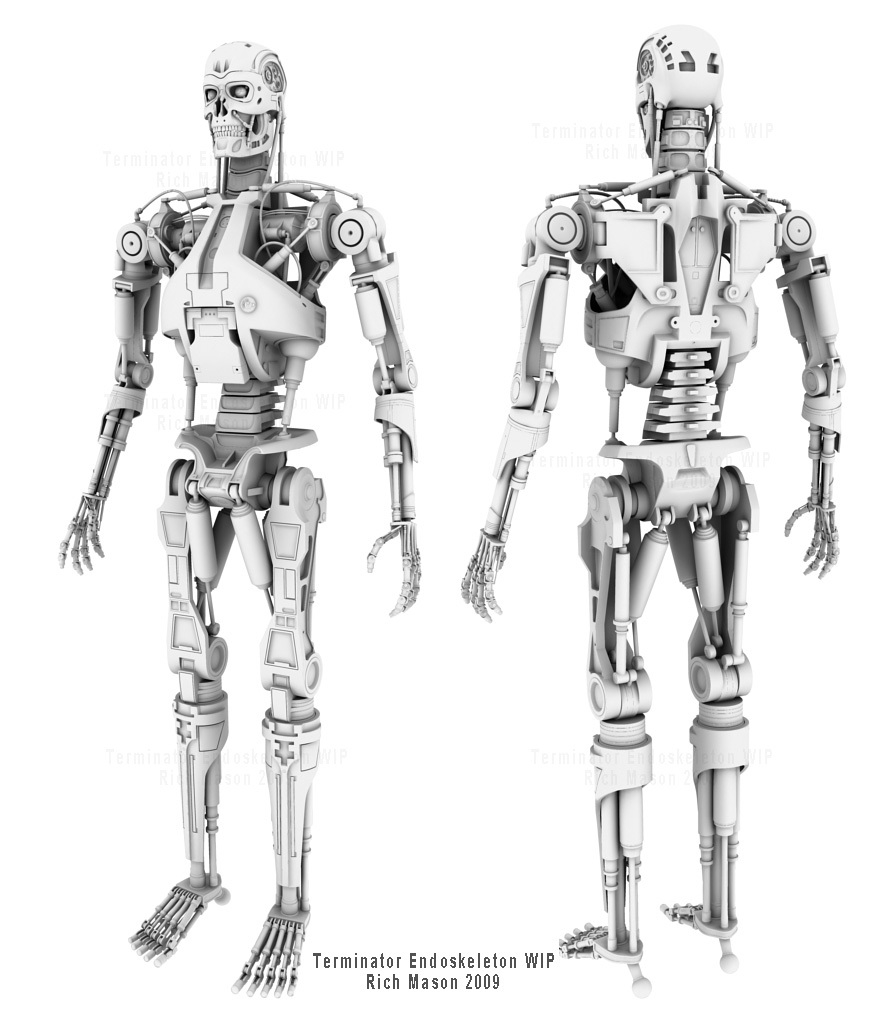
J'ai pour ma part une variante avec ce projet. Car il s'agit de fabriquer un robot fantastique, un vrai Terminator qui serait capable de se faire passer pour un humain (en comptant aussi sur l'effet de surprise, un masque en latex et des lunettes de soleil).
Mais même si j'échoue à faire ce robot fantastique, il y a quand même de grande chance que je fasse au moins un robot très chouette. Je serais déjà content si j'arrive à faire la moitié de ce que j'ai dit.
J'espère faire le prototype en 4 ans pour coller à une phrase du héro dans le premier film de 1984 : "Non, [les Terminators] n'existent pas encore, pas avant 40 ans.", donc 2024 pour avoir un prototype aux fonctions basiques.
Pour ceux que ça intéressent, un Australien a fabriqué en fonderie alu une grosse marionnette d'endosquelette de Terminator : https://youtu.be/Am3ZuMiCe7A
Et un anglais en fait un autre robot en alu : https://youtu.be/67sREK3QOqE
#109189 Mon Gamin, un Terminator T-800
Posté par
sur 02 mai 2020 - 03:42
dans
Tête de robots, humaine ou animale, animatronique
Les deux ^^
Enfin ta première proposition, mais avec un vrai aspect fonctionnel quand même.
Quand je dis "estimation des distances", c'est via la vision stéréoscopique que j'essaierais d'avoir ça, d'où le terme "estimation" plutôt que "mesure".
Mais cette version aura, du moins dans un premier temps une caméra à la place de l’œil gauche, comme il n'interagi pas encore avec son environnement, pas encore besoin de vision stéréoscopique. A ce niveau là je ne peux pas faire grand chose avec les yeux présents dans le kit. Il faudra que j'investisse dans une imprimante 3D, en fait je voudrais que ces yeux soit des objectifs de caméra.
#109449 Mon Gamin, un Terminator T-800
Posté par
sur 09 mai 2020 - 08:52
dans
Tête de robots, humaine ou animale, animatronique
Pour le moment je vais faire les modifications dont j'ai parlé pour voir ce que ça donne.
#109655 Mon Gamin, un Terminator T-800
Posté par
sur 15 mai 2020 - 10:34
dans
Tête de robots, humaine ou animale, animatronique
Je pense que pour l'instant mon Uno suffira pour cette version de la tête. Je verrais pour la version suivante. Pour le prototype complet je pense même mettre plusieurs Arduino pour contrôler les membres et la marche du robot. ça changera peut-être, mais je pense organiser les choses de la manière suivante : Arduinos pour gérer directement les membres et les fonctions "simples" de l'androïde, le Raspberry pour diriger le tout et un Jetson Nano ou en tout cas un accélérateur IA pour les fonctions d'apprentissage.
#109187 Mon Gamin, un Terminator T-800
Posté par
sur 02 mai 2020 - 02:54
dans
Tête de robots, humaine ou animale, animatronique
Bonjour,
Je me suis présenté ici ; https://www.robot-ma...ntation-xb2000/
En tant que super fan de Terminator et Terminator : Le Jugement Dernier, je voudrais pour 2029 ; une année importante pour la saga, puisque c'est celle d'où viennent les protagonistes du futur ; rendre hommage aux deux premiers films de la franchise. L'hommage ultime, un vrai Terminator série 800 modèle 101, "imprimé en 3D" en titane et capable d'agir comme dans les films (mais pas de tuer). Mais avant cela, il y aura un prototype, fait de matériaux composites et dont l'intelligence artificielle proviendra de données open source.
Ce prototype sera construit en trois étapes:
-La tête
-Torse avec les bras
-Jambes
Le but sera de le rendre «intelligent» à chaque étape
La tête :
-Assistant vocal
-Résoudre des problèmes simples
-Reconnaître ses contacts
-Reconnaître les objets
-Vision stéréoscopique et estimation des distances
Le torse avec les bras:
-Saluer
-Langage des signes
-Manipuler des objets
Jambes :
-Apprendre à marcher
Ce sont les objectifs de base.
Pour approfondir l'intelligence artificielle, je m'inspirerais de la théorie des intelligences multiples et de la théorie triarchique de l'intelligence, en utilisant le maximum de données open-source.
Qu'est-ce que j'en ferais ? Tout et n'importe quoi, surtout n'importe quoi. Je rêve un jour de le faire participer à un concours de cosplay :
- Vous êtes déguisez en quoi ?
- En humain...
Si je poste dans cette section, c'est que pour l'instant j'en suis qu'à la tête.
Je me suis basé sur un kit vinyle.

Et pour l'I.A, je vais essayer de commencer avec Kalliope sur un Raspberry Pi 4.
Je débute en Python et C.
Pour le moment, j'utilise principalement du matériel préexistant pour évaluer si je suis capable d'avoir de bons résultats et donc de m'investir davantage.
Je vais aussi essayé de faire une version virtuelle sur Webots.
Pour l'instants ce tout premier "brouillon" utilise des servo-moteurs. La prochaine version sera à vérin pneumatiques.
Il a sa petite chaîne Youtube : https://www.youtube....RhQ8ZSiRfGd2gQg
(mettez les sous-titres pour la première vidéo)
Les servo-moteurs sont contrôlés par un Arduino Uno. Je pense que plutôt que tout contrôler avec un Raspberry, il va demander une certaine position des membre à un Arduino qui va contrôler directement les actionneurs pour obtenir la position voulue par le Raspberry.
Prochaine étape le faire chanter...
#110547 Mon Gamin, un Terminator T-800
Posté par
sur 15 juillet 2020 - 09:57
dans
Tête de robots, humaine ou animale, animatronique
Je suis en train de reconcevoir son cou et la motorisation de la mâchoire pour simplifier et amélioré via des pièces imprimer en 3D. J'ai été méga occupé depuis le déconfinement, mais là pour les prochains mois je vais être très libre et je vais pouvoir y consacrer plus de temps.
En tout cas depuis mon dernier message j'ai des notions de FreeCad et Python...
J'ai aussi récupérer des mains/avant-bras que je vais motorisé, et concevoir le reste des bras et les épaules qui sont assez complexes. Mais ça c'est un autre sujet.
Faut que j'avance, celui d'AndysMachines a les yeux qui bougent :
Niveau programmation je commencerais par lui faire faire du suivi de visage et de la reconnaissance faciale, qu'il puisse dire "Bonjour Machin" en te regardant dans les yeux ^^
#113129 Fonderie à PLA perdu
Posté par
sur 10 mars 2021 - 02:28
dans
Impression 3D et Imprimantes 3D
Voilà une technique pour avoir des pièces de fonderie peu chère. Celle de la fonderie à PLA perdu.
C'est le principe de la fonderie à cire perdue. On a une pièce en cire que l'on recouvre de plâtre, on passe ça au four, le plâtre durcit et la cire fond laissant une cavité où on peut couler le métal.
http://solatges.fr/blog/index.php?article1/fonderie-cire-perdue
Mais au lieu de s'embêter à faire une pièce en cire on peut tout simplement l'imprimer en PLA, ça marche tout aussi bien.
http://solatges.fr/blog/index.php?article2/fonderie-pla-perdu
C'est surtout pour faire des pièces en aluminium, certains font fondre leur boite de conserve.
#116110 Récap de la coupe de france 2022 / Eurobot
Posté par
sur 29 juin 2022 - 05:47
dans
Coupe de France de robotique / Eurobot
Youtube m'a proposé l'émission d'E=M6 sur la coupe 2002 :
#116104 Récap de la coupe de france 2022 / Eurobot
Posté par
sur 26 juin 2022 - 06:46
dans
Coupe de France de robotique / Eurobot
Sympa à voir, pas d'équipe Robot Maker ? ^^
#115939 Salut à vous !
Posté par
sur 21 mai 2022 - 12:37
dans
Et si vous vous présentiez?

Pour des enfants en bas âge il existe des jouets sympas.
Par exemple ce modèle à programmation mécanique.
https://www.amazon.f.../dp/B07RH894QY/

Il y aussi les automates dont j'ai parlé ici : https://www.robot-ma...nu/#entry109731
Comme celui-ci de la série des Tamiya Robocraft : https://www.amazon.f.../dp/B00061HIAI/

Ou en carton
Même motorisé par un simple élastique
#113072 Retour d'expérience services d'impression 3D
Posté par
sur 25 février 2021 - 06:27
dans
Impression 3D et Imprimantes 3D
J'ai reçu ma première pièce en PLA.

Elle vient de chez Micky 3D Stock via Treatstock via Craftcloud. Avec une même commande mes pièces ont été imprimés chez deux prestataires différents.
Je n'ai jamais eu en main de PLA avant. C'est plus rigide que l'ABS mais moins résistant (déjà cassé une dent, aussitôt recollé).
C'est très bien pour des pièces assez grosse, mais pour les petite pièces je préfère l'ABS.
Le remplissage est de 20%, si on l'augmente, on augmente la résistance de la pièce ?
#113024 Retour d'expérience services d'impression 3D
Posté par
sur 19 février 2021 - 12:12
dans
Impression 3D et Imprimantes 3D
Si l'impression reste accessible financièrement je pense que le post-traitement nécessaire pour cette matière est très coûteux il faut passer par des entreprises spécialisées.
Ben en fait non, enfin oui si tu le fais faire. Mais non si tu le fais toi-même. ça reste de l'acier inox donc tu peux la poncer à la dremel par exemple avec un embout pour travailler le métal. J'ai pas voulu m'embêter sur mes pièces et j'ai mis du mastic fin de finition. C'est loin d'être lisse mais j'aime bien le rendu. Par contre j'ai agrandi les trous de fixations sur mon "nez" en métal avec un foret pour métal et ça se perce, c'est bien plus dure que de l'alu, mais ça se perce quand même. Et avec de l'huile de coude ça peut se poncer et se polir. Si en plus t'as de quoi usiner un peu, tu peux vraiment faire un éventail énorme de pièces.
Sur ma pièce je pense que les supports n'était pas en métal car il y en a aucune trace. Comme si ma pièce avait été imprimé sans support alors qu'elle n'a pas de surfaces plane pouvant servir de base. Dans le cas contraire ça peut effectivement être compliqué d'enlever les support en fonction de la complexité de la pièce.
En "impression 3D" c'est plutôt le titane qui pose problème, dans son émission Savage's build, Adam Savage en avait fait les frais avec son armure d'Iron Man imprimé en titane. Il pensait fixé les pièces avec des rivets après les avoir percés avec une simple perceuse. Mais non, le foret n'égratigne même pas la surface ^^. Il a du y aller avec une machine industrielle pour percer les trous de fixations.
#113031 Retour d'expérience services d'impression 3D
Posté par
sur 19 février 2021 - 12:25
dans
Impression 3D et Imprimantes 3D
Par poste traitement j'entends les opérations nécessaires à l'obtention de la pièce que qu n'obtient pas directement à la sortie de l'imprimante 3D parce pour imprimer de l'inox les filament contiennent un liant en polymère et pour retirer ce liant il faut passer par une opération de déliantage et puis ensuite passer par une opération de frittage. Et seulement ensuite tu peux t'occuper de l'état de surface toit même
Ces opérations sont nécessaires pour le filament inox mais pas systématiquement pour tout les filaments métalliques
J'avais pas tilleté, effectivement pour avoir une pièce "brute" l'impression 3D ne suffit pas, ensuite il faut passer par un déliantage pour enlever les 10% de polymère, elle devient alors poreuse. Puis elle passe par un frittage pour devenir solide et dense.
Ce genre d'imprimante fonctionne en général avec de la poudre et des laser ( frittage laser). La poudre sert de support. Si jamais tu veux une sphère creuse, pour éviter qu'elle soit pleine de poudre il faut penser à laisser un trou...
Justement non, tu parles de la technologie DLMS, là on parle d'une impression FDM plus standard que Sculpteo utilise aussi pour imprimer du PLA/Nylon (mais pas la même imprimante). C'est la méthode la moins chère pour des pièces métallique. Ils ont aussi la méthode par projection de liant.
Petit comparatif :
Plastique Nylon :

FDM Fused Deposition Modeling / Dépôt de Fil
Matériel : https://www.sculpteo...noxydable-316l/
Mode d'impression : https://www.sculpteo...-impression-3d/

DLMS Direct Metal Laser Sintering – Frittage Laser Direct de Métal
Matériel : https://www.sculpteo...ier-inoxydable/
Mode d'impression : https://www.sculpteo...materiaux-dmls/

Il y aussi de l'alu et du titane :


Projection de liant
Matériel : https://www.sculpteo...ction-de-liant/
Mode d'impression : https://www.sculpteo...tting-materiau/

En supplément les pièces peuvent être polis et même plaqués nickel ou or. Il y a aussi une fonderie mais la taille et le prix le limite plutôt pour des bijoux.
Un passage au four n’est-il pas obligatoire pour tous les filaments métaux ?
Apparemment pour l'étape de frittage.
Pour plus d'info il y a la présentation d'une solution d'impression métal FDM :
https://www.neofab.f...imante-metal-x/

#113009 Retour d'expérience services d'impression 3D
Posté par
sur 15 février 2021 - 03:17
dans
Impression 3D et Imprimantes 3D
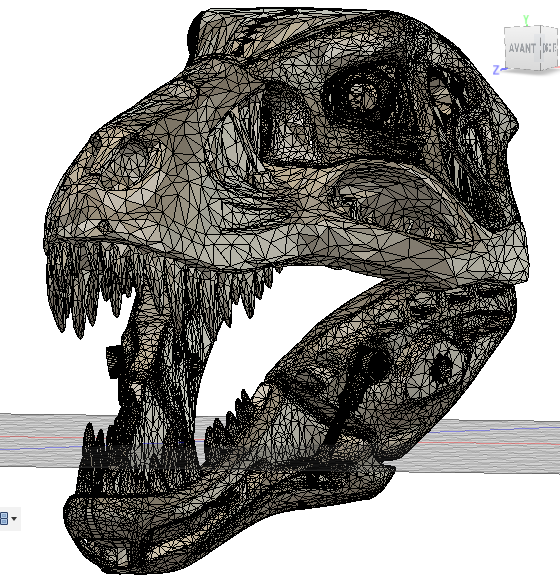
Bonjour pour mon robot (https://www.robot-ma...natosaurus-rex/), j'ai décidé de le faire imprimé en 3D.
Je n'ai pour l'instant pas la place pour une imprimante 3D et pas forcément le temps de m'en occuper correctement.
Je pensais passer par le service du site mais au final soit je voulais autre chose que du PLA, soit la pièce est trop grosse.
Donc dans un premier temps je suis passer par Sculpteo (https://www.sculpteo.com/fr).
J'avais à la fois envie de me faire plaisir et de tester un peu les matériaux proposé, du coup j'ai passé cette commande :
Je viens de recevoir la commande :

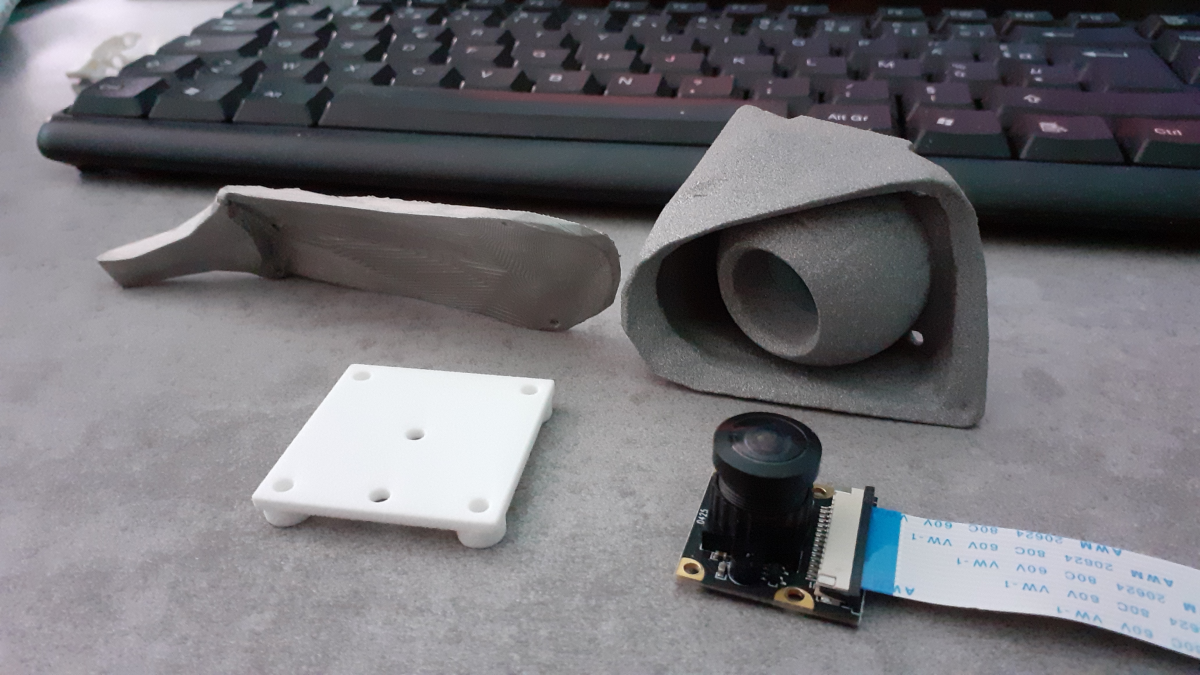
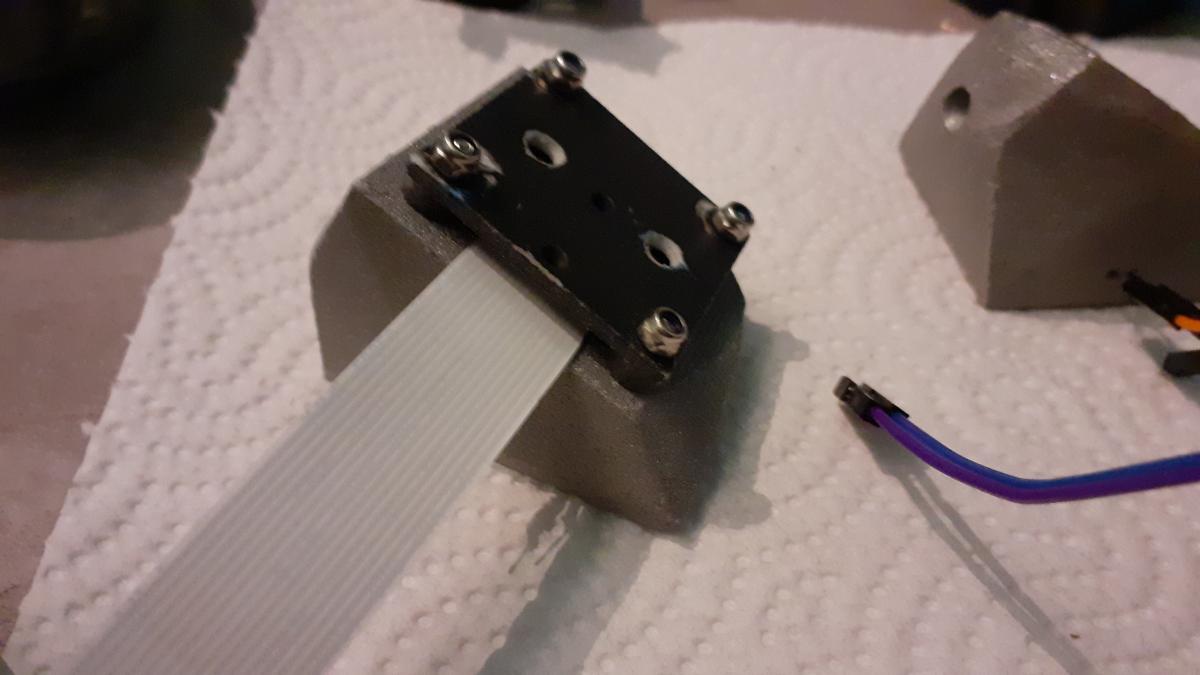
Je suis très satisfait des pièces. Le nez est en donc en pure métal (Matériaux métal pour impression 3D : Acier Inoxydable Ultrafuse 316L (sculpteo.com)). Au vu du coût ce sera sans doute la seule pièce dans cette matière (un petit caprice). J'ai fourni un modèle 3D sans support ni surface plane et il n'y a eu aucun soucis.
L'orbite oculaire est en alumide (https://www.sculpteo...teriau-alumide/), le touché fait moins métallique que le nez mais c'est assez troublant. On sent que c'est un mélange plastique/aluminium. Une bonne alternative au filament inox.
Le support de caméra est en nylon (https://www.sculpteo...riau-plastique/) La pièce est très résistante et légèrement flexible.
La livraison est de 6,25 €.
J'ai aussi commandé des pièces via Craftcloud (https://craftcloud3d.com/), pour l'instant j'ai reçu 2 petites pièces en ABS (serviront de support) à 5,50 €.

Donc Craftcloud est un intermédiaire qui permet de comparer plusieurs boites d'impressions 3D en fonction du prix. Après avoir comparé les prix en direct, passer par Craftcloud n'est pas plus chère. Les petites pièces en question sont passé par Craftcloud => Treatstock => L-id3d. J'ai aussi commander et pas encore reçu des pièces Craftcloud => Varishapes.
De mon expérience je dirais que pour des petites pièces PLA autant les commander sur Robot-Maker, les pièces métalliques ça à l'air plus avantageux sur Sculpteo, et pour le reste ce serais plutôt Craftcloud.
Donc si vous avez aussi des retours d'expérience ça pourrait aider du monde.
#116031 AndysMachines (Terminator T-800)
Posté par
sur 10 juin 2022 - 11:33
dans
Contenu vidéo
Voilà une chaîne YouTube que je suis depuis quelques temps :

AndysMachines
Playlist de son Terminator : https://www.youtube....1udgoDaV5SBcRWw
Dans cette série, je couvre la construction d’un endosquelette Terminator T800, construit complètement à partir de zéro en n’utilisant aucun kit ou pièce préfabriquée. Il ne s’agira pas simplement d’un modèle statique, mais d’un véritable robot autonome fonctionnel capable de se déplacer, de voir, d’entendre et d’interagir avec son environnement.




