Posté par
Posté par
Bonjour tout le monde,
Après pas mal d'absence sur ce forum pour cause d'autres passions (construction d'une station ondes-courtes, d'une big CNC chassis béton), je reviens pour vous présenter mon nouveau petit robot Gust4v3 en cours de construction.
C'est une simple petite base roulante qui devrait éviter les obstacles.
J'en entends déjà se dire "-Encore !!!". Oui, mais pour moi c'est la première 
Je suis parti avec des pignons plastique et de petits moteurs de récup sur de gros photocopieurs et des morceaux de CP
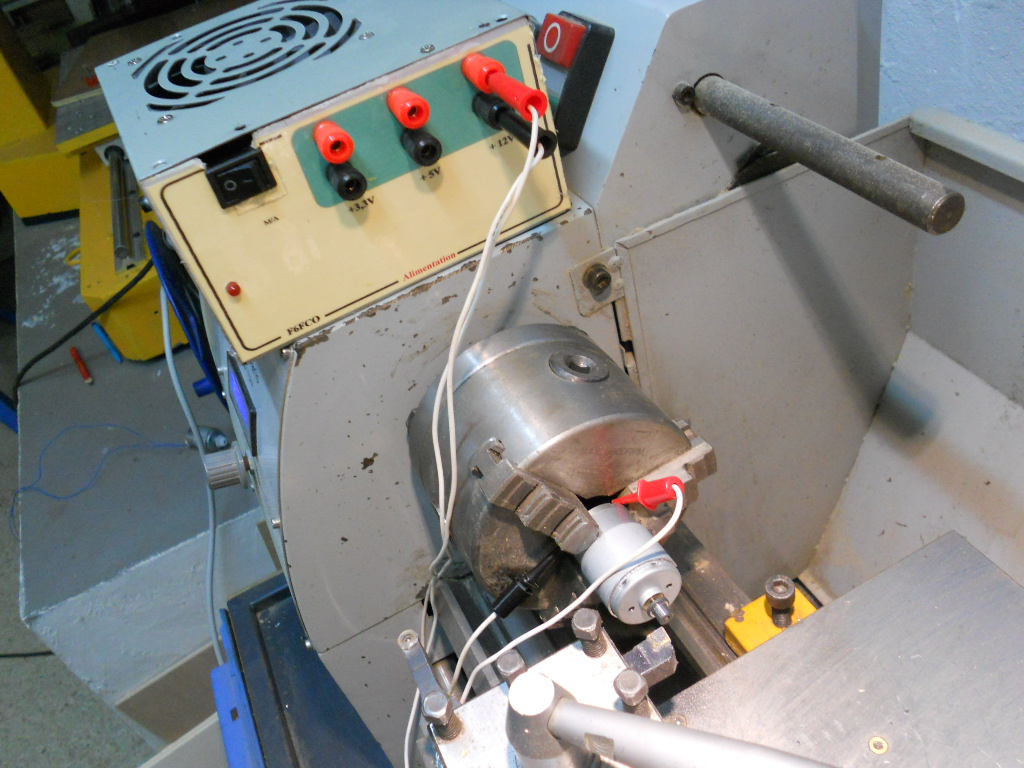
En premier lieu il a fallu fixer les pignons plastiques sur les moteurs et sur les roues en bois


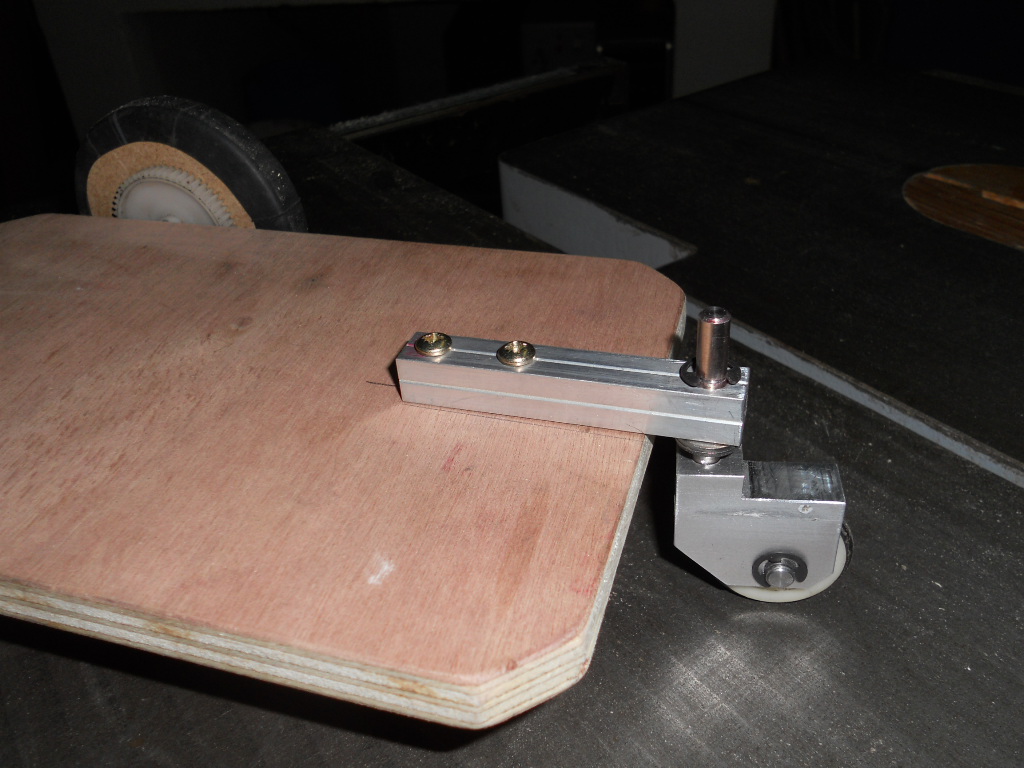
J'ai fabriqué une troisième roue folle, j'aurais autant pu aller l'acheter chez Mr Bricastolage mais non. Une poulie de photocop, un joint torique pour faire le pneu, usinage d'un morceau d'étiré en alu pour faire le corps: