Posté par
Posté par
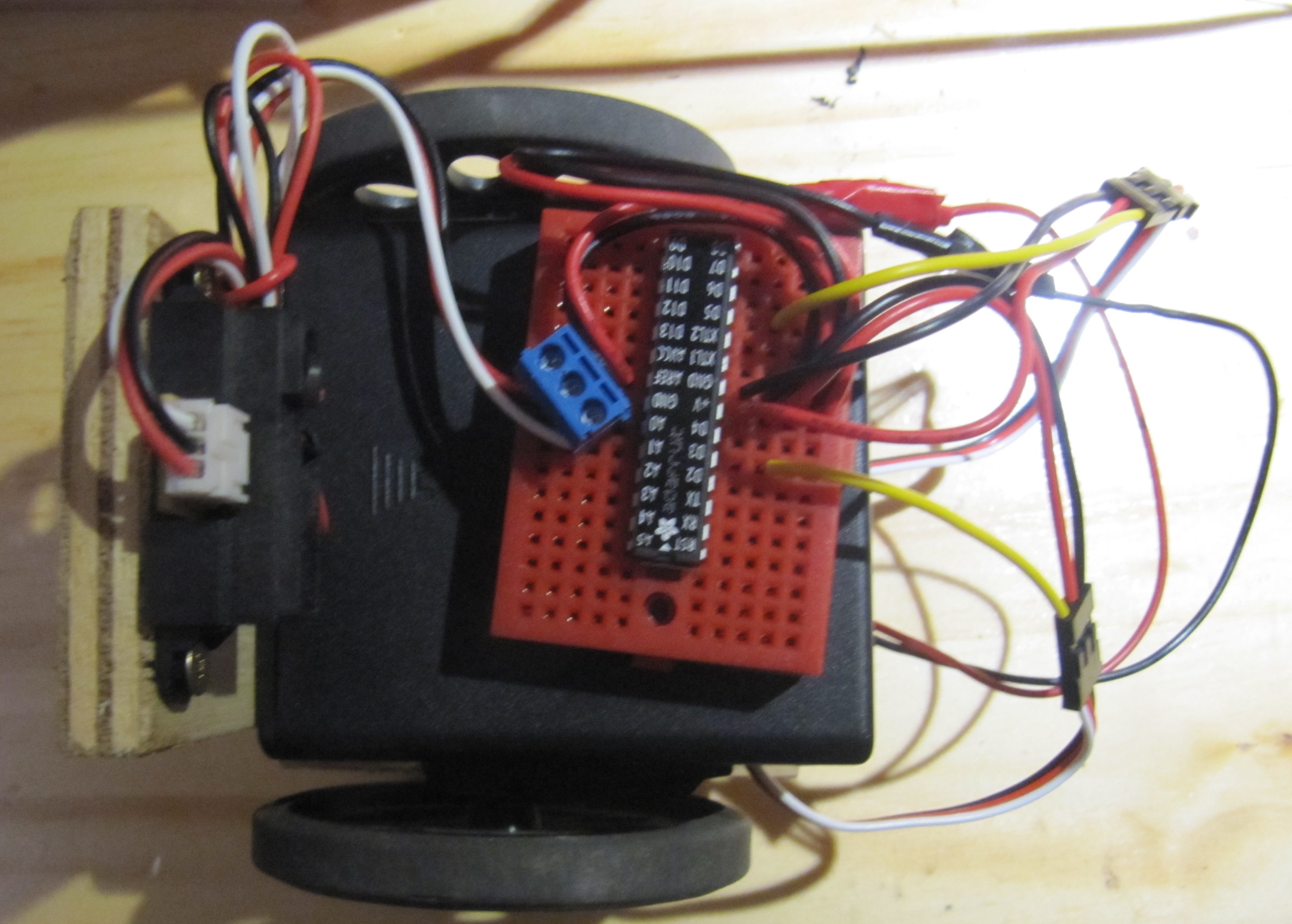
Faudrait que je me procure quelques L298Si c'est uniquement le manque de puissance de tes driver pour moteur qui te dérange sache que tu as le L298 qui est pas mal pouvant conduire 2A en continu et 3A ampère en pointe ! Sinon tu as aussi le LMD18200 mais là c'est plus exactement le même joujou et le prix n'est plus le même non plus ^^
alors que le L298 me coute 4 euros le LMD18200 me coute 8 euros et il ne contient qu'un pont en H alors que le L298 en contient deux ...

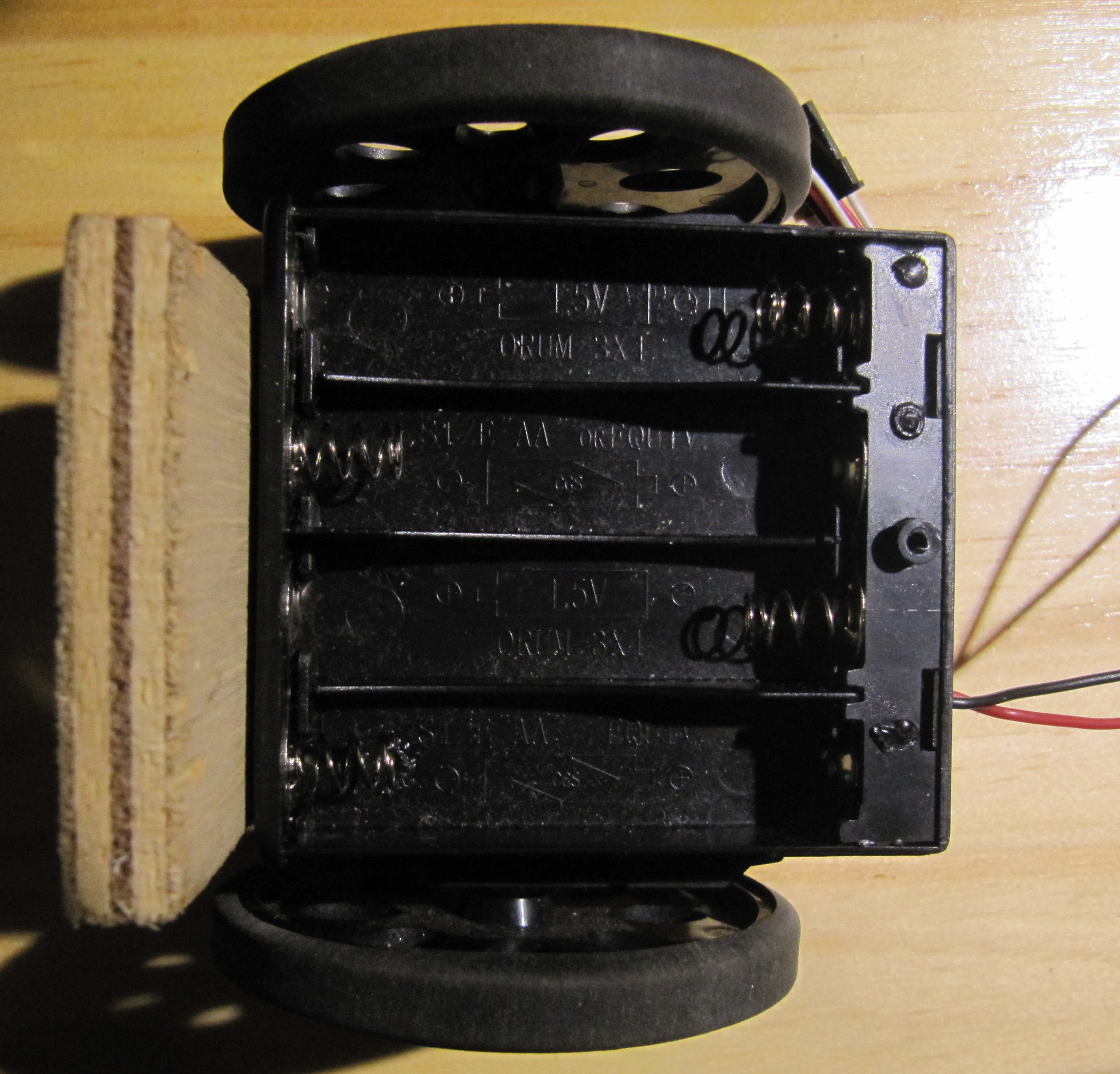
Mais 2100mA ça fait beaucoup, donc peu d'autonomie potentielle!
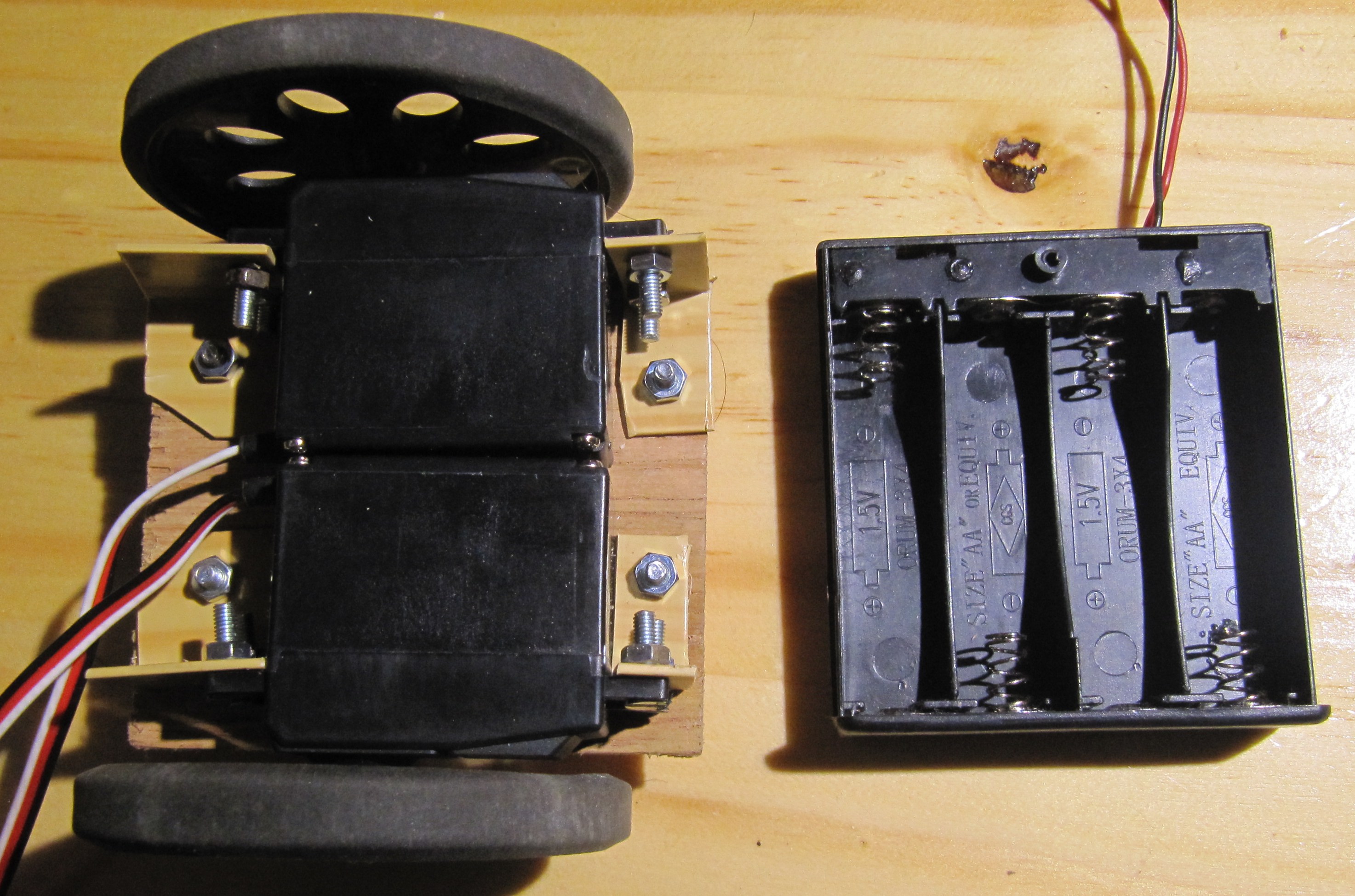
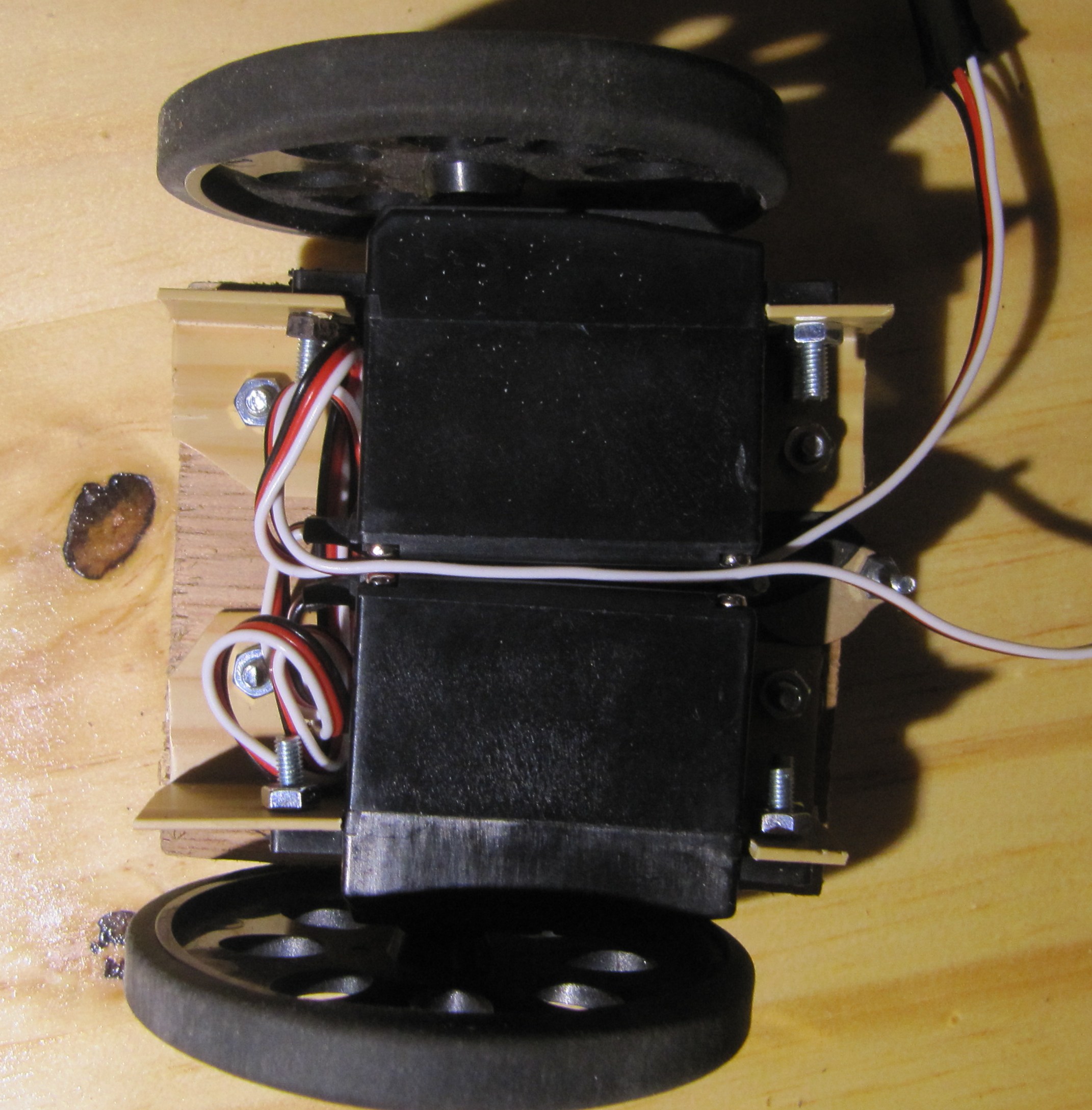
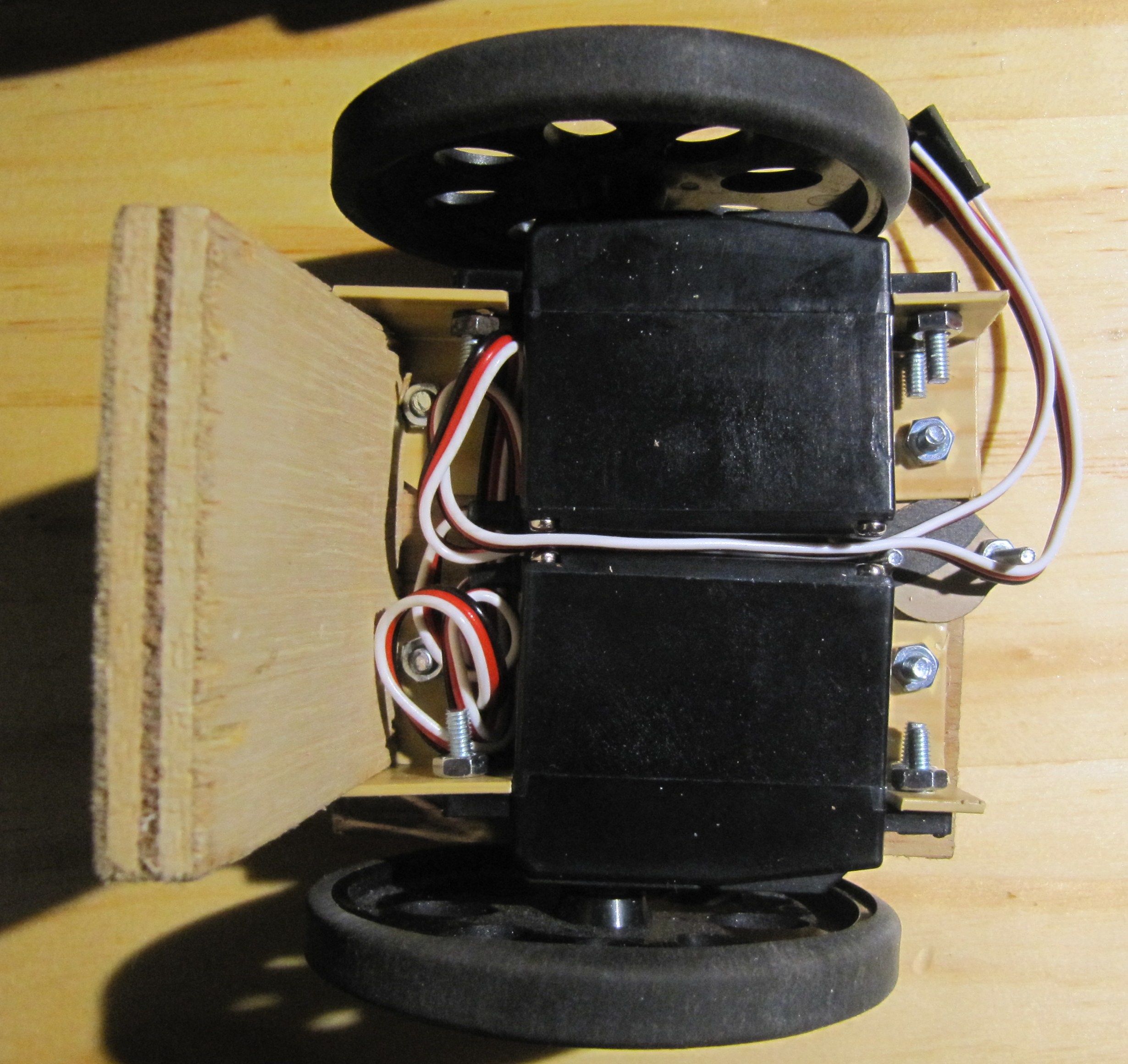
AU passage, les moteurs du bidule Tamiya sont prévus pour du 3V, ce qui ne m'arrange pas des masses
Mais en effet, faudrait que je m'équipe d'autres drivers ^^