Super vidéo yamovince.
Bonne continuation pour le tournoi de robotique de Nimes.
Il y a 148 élément(s) pour macerobotics (recherche limitée depuis 08-mai 13)
 Posté par
sur 04 avril 2016 - 11:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 04 avril 2016 - 11:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Super vidéo yamovince.
Bonne continuation pour le tournoi de robotique de Nimes.
Posté par
sur 04 avril 2016 - 07:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
La campagne de crowdfunding pour le robot MRPi1 à démarrer.
Lien de la campagne : http://campaign.macerobotics.com/
Bonne journée,
Posté par
sur 27 mars 2016 - 10:48
dans
Electronique
Salut,
Oui, il faut mieux un convertisseur de type découpage (Buck) :
Exemple :
Je déconseille le LM7805 pour ce type de courant.
Posté par
sur 16 mars 2016 - 06:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 15 mars 2016 - 08:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
Pourquoi ne pas utiliser un module Bluetooth, plus simple et disponible.
Sinon regarde ici :
http://www.robot-maker.com/forum/topic/8664-telecommande-24ghz-et-arduino/
Posté par
sur 03 mars 2016 - 07:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Félicitation Yamovince pour ton robot !
Une petite question, quelle est la référence des servomoteurs que tu utilise ?
Et bonne continuation pour ton robot.
Posté par
sur 24 février 2016 - 07:31
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut,
Une arduino me parait inadapté pour un robot de surveillance. Une arduino est basé sur un microcontrôleur, pas fait pour piloter une périphérie comme une webcam usb. Si tu as une camera via une interface série ou parallèle pourquoi pas.
Une carte Raspberry pi serait mieux adapté pour ton projet : https://www.raspberrypi.org/
Posté par
sur 21 février 2016 - 11:02
dans
Energie
La tension nominal est de 3.7 Volt et 4.2 Volt max.
Posté par
sur 21 février 2016 - 09:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut Path,
Félicitation pour ta configuration en point d’accès.
Pour le robot MRPi1 en configuration point d’accès voici un peu plus de détails.
Oui, il existe de nombreux tutos. En ce qui me concerne j'ai utilisé : https://learn.adafru...-point/overview
J'ai eu le même problème pour le redémarrage, j'utilise aussi le fichier rc.local pour le lancement des services.
Je n'est pas trouvé d'autre solution.
Posté par
sur 19 février 2016 - 06:52
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Nouvelle vidéo du robot MRPi1 avec un asservissement de position (orientation + distance) :
Posté par
sur 08 février 2016 - 10:35
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut Path,
Oui, la raspberry pi du robot MRPi1 est configurée en point wifi (access-point) avec une IP statique. J'utilise hostapd, voici un tuto d' exemple pour configuré une raspberry en AP : lien
Une petit vidéo, le robot MRPi1 est contrôle en wifi via un smartphone :
Cela peut donc fonctionner dehors ?
Oui, sa peut fonctionner n'importe où.
Tu utilise quoi apache php ? autre chose ?
J'utilise lighttpd comme serveur web (plus léger que Apache), la page web de contrôle est codé en PHP et HTML. Le PHP permet d'envoyer les commandes au microcontrôleur via la liaison UART.
Si tu à d'autres questions n’hésite pas.
Posté par
sur 01 février 2016 - 06:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je te remercie.
Posté par
sur 31 janvier 2016 - 01:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Voila une nouvelle vidéo du robot MRPi1 basé sur raspberry Pi.
https://www.youtube....h?v=XWjdgG6T_Yo
Cette fois si avec la sortie jack relié directement à l'ampli de la carte contrôle.
Posté par
sur 15 janvier 2016 - 05:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Une nouvelle vidéo, le robot MRPi1 gère les obstacles avec 4 capteurs de proximité infrarouges. Ces capteurs sont à l'avant du robot. MRPi1 est programmé sur cette vidéo en langage python. Il est donc autonome.
Posté par
sur 14 janvier 2016 - 07:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Voila un nouveau PCB pour le robot MRPi1, avec une alimentation boost afin d'avoir du +5V pour la Raspberry Pi. La carte ci-dessous a été soudé à la main.
Posté par
sur 08 janvier 2016 - 10:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
Quel est le langage de programmation préférez vous pour programmer ce type de robot sous Raspberry pi ?
Une API en langage python et C est en cours de développement.
Posté par
sur 08 janvier 2016 - 06:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui, c'est possible de brancher ce mini ampli sur le jack d'une Raspberry. Mais ce n'est pas adapté pour un petit robot mobile de 100mm de diamètre.
Posté par
sur 07 janvier 2016 - 08:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
Le niveau de la sortie audio jack nécessite une amplification avant de pouvoir le brancher sur un haut parleur.
Il y a aussi la possibilité de branché un câble jack directement sur l'ampli sans passé par l'I2S.
La partie audio n'est pas encore finalisé, encore trop de bruit !
Posté par
sur 06 janvier 2016 - 06:52
dans
Robots roulants, chars à chenilles et autres machines sur roues
Le robot MRPi1 vous souhaite une bonne année 2016 !
Voila une petite vidéo avec la synthèse vocale. Le logiciel utilisé est Festival sous Raspbian. L'audio est envoyé par I2S au microcontrôleur. Le microcontrôleur convertie l'audio en analogique via un DAC. Ensuite l'audio est amplifier par un TPA301.
La vidéo est un peu bruité.
Posté par
sur 30 décembre 2015 - 06:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui, j'ai laissé le bluetooth. Pour le moment je travaille sur le wifi la priorité, car sur la Raspberry pi version A+, il n'y a pas d'ethernet. Donc le wifi est principal.
Voila l'architecture électronique : http://www.macerobotics.com/news/
Posté par
sur 28 décembre 2015 - 04:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
L’odométrie est prévue, il y a deux connecteurs à coté des moteurs.
Les moteurs sont équipés de deux axes afin de pouvoir recevoir des encodeurs magnétiques.
Pour le moment, pas encore testé l’odométrie, mais bientôt, …
Il y a aussi un module bluetooth, mais je pense le supprimer, wifi + bluetooth c'est redondant. Qu'est ce que vous en pensez ?
Posté par
sur 27 décembre 2015 - 07:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
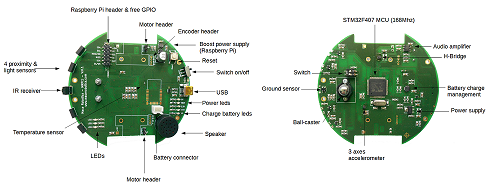
Petite précision, la raspberry pi n’est pas encore branchée à la carte du bas. L’alimentation boost pour l’alimenter va être sur la prochaine version de la carte.
PCB châssis :
· Connecteur USB pour la programmation du microcontrolleur et pour le rechargement de la batterie.
· Microcontrôleur STM32F407
· Pond en H
· 2 motoréducteur pololu
· Une batterie 3.7 Volt
· Gestion de la recharge de la batterie
· 4 capteurs infrarouges de proximité
· 1 capteur infrarouge 38Khz (TV remote)
· 1 haut parleur
· 1 capteur de sol
· 1 accéléromètre 3 axe relié en I2C
· Alim boost pour la raspberry pi
Gestion haut niveau :
· Raspberry pi A+ : relié avec la liaison série à la carte du bas.
Logiciels utilisée :
· Kicad,
· CooCox IDE pour le firmware du microcontrôleur,
· Inkscape pour le design du support de la raspberry (découpe laser dans un fab lab)
Le connecteur du bas (non branché sur la photo précédente) permet de relier la liaison série (RX et TX) plus l’alimentation +5V pour la raspberry.
La prochaine étape est donc d’insérer l’alimentation boost sur le PCB de la carte châssis et d’améliorer la mécanique.
Posté par
sur 27 décembre 2015 - 10:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Je vous présente le petit robot mobile MRPi1 qui est en cours de développement. C’est un robot à entrainement différentiel avec un microcontrôleur pour la gestion du bas niveau et une carte Raspberry Pi pour le haut niveau. Le robot est alimenté par une batterie Lipo rechargeable directement par un port USB.
Voici une photo du premier prototype :
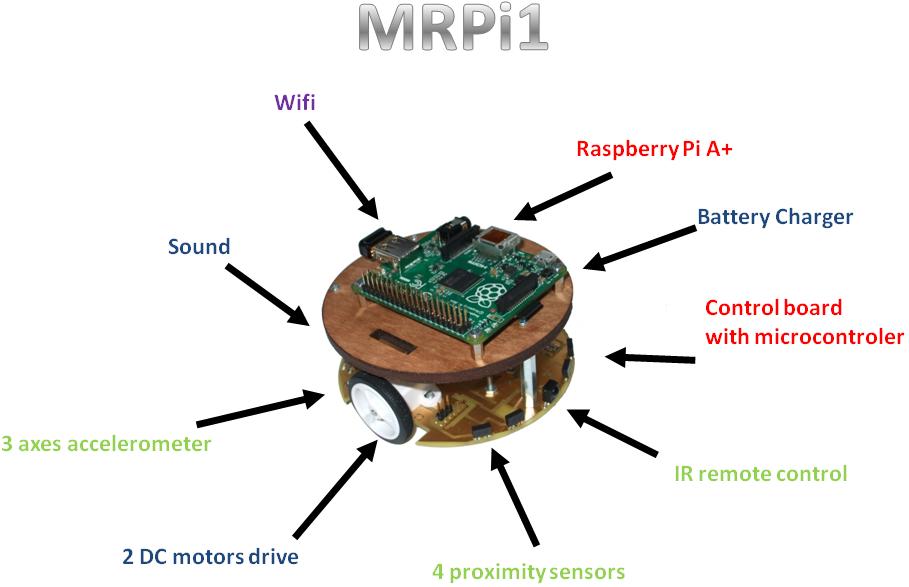
Il est donc facilement programmable en langage python, C ou autres.
Si vous avez des questions n’hésitez pas.
Site web : www.macerobotics.com ou twitter : https://twitter.com/macerobotics




