Si je puis me permettre ,et si s'était plutôt un problème de timing ?
Voir partie "3-4 timing chart" du datasheet
Je pense que tu en demande trop par rapport au timing interne du capteur ,ça balance pas en continu l'info ,y'a un petit traitement interne qui induit un délai . 5ms c'est carrément trop short je pense que ça ne peut pas marcher tout court ,et que ce ne sont pas des parasites.
D'après le graphe du datasheet ,tu ne pourras guère descendre sous la barre des 50ms ,chaque mesure prend apparemment 38,3ms +/- 9,6 auxquelles il faut rajouter 5ms de délai pour que Vout soit rafraîchit.
Peut-être une piste ? (en tout cas il est clairement inutile de lire la valeur de ce capteur à une fréquence trop élevé )
Contenu de FredoO
Il y a 38 élément(s) pour FredoO (recherche limitée depuis 09-mai 13)
Par type de contenu
Voir pour ce membre
#52959 Question sur les parasites d'un capteur ir sharp
 Posté par
sur 18 janvier 2013 - 08:15
dans
Electronique
Posté par
sur 18 janvier 2013 - 08:15
dans
Electronique
#44600 Alimentation Moteurs Brushless
Posté par
sur 06 juin 2012 - 08:30
dans
Electronique
Une carte de puissance par moteur --> ouiMerci pour vos réponses.
Merci lestephanoi, je vais aller me renseigner sur ton topic.
Merci Melmet pour tes éclaircissements, en fait il me faudra une carte de puissance par moteur ? Ou une peut gérer les 4 ?
Pour l'inclinomètre, je suis pas trop sûr on avait trouvé un gyroscopes 3 axes et accéléro 3 axes, il me semble que c'est plus adapté pour des drônes non ?*
Bonne soirée.
Ulysse.
Inclinomètre c'est hors sujet .Gyro et Acc 3 axes c'est tout bon !(avec ça tu peux faire du "lâché de manche")
#44298 recherche d'admin
Posté par
sur 02 juin 2012 - 12:35
dans
Archives
Ya un truc qui me chiffonne : tu nous disais être prof de math mais quand on clic le profil de l'admin de ton site on peut voir que tu as en fait...12 ans !?
#44138 Projet de Pseudo-hélicoptère
Posté par
sur 31 mai 2012 - 06:21
dans
Conseils et aide aux débutants, livres et kits en robotique
il faudrait utilisé des bon moteur(bruhles )mais ca fait tout de suite augmenté le prix de 50 € par moteur!(excusez moi pour l'hortographe de bruschlesse)

Tout à fait car un des ventilos de PC auront déjà du mal à soulever leur propre poids !
En gros tu veux faire un quadricoptère ?
Avec 4 moteurs pas besoin d"hélice de queue (anticouple) ,les couples de 2 moteurs annulant ceux des deux autres.Mais cela implique d'avoir 2 hélices à pas inversés et 2 hélices à pas normales ,permettant ainsi d'avoir 2 moteur tourant dans un sens ,et 2 moteurs tournant dans l'autre sens.
Comment pensais-tu asservir tes ventilos?Parceque pour stabiliser ce genre d'engin faut pas un système mou du genoux ^^
#43789 Recharger un accu avec arduino
Posté par
sur 27 mai 2012 - 10:55
dans
Electronique
Et apres vérification ma batterie est en li ion. J'ai un chargeur nimh pour modélisme (7,2 a 8,4v) avec détecteur de fin de charge, c'est compatible ?
Pas compatible .
#43757 L'IA appliquée à la robotique
Posté par
sur 26 mai 2012 - 06:08
dans
Intelligence artificielle
Moi j'attends toujours de voir un exemple de ce que votre magnifique programme fait...

Dire que la recherche en intelligence artificielle n'évolue pas, c'est une connerie monumentale. 25 ans d'expériences ou pas, ça reste une connerie.
Par exemple, pourriez-vous faire un chatbot qui passe le Test de Turing ?
Pourriez-vous faire une IA pour un robot humanoïde afin qu'il apprenne à percevoir seul son environnement, à utiliser seul ses capteurs et qu'il apprenne à se déplacer, voir à marcher ? Ou une IA pour un quadricoptère ?
Et puis vous ne faites pas de "transfert technologique" gratuit. En gros, vous considérez que vous possédez la science infuse mais vous ne voulez surtout pas nous en montrer un bout, pour être sûr qu'on ne vous pique pas l'idée et que vous puissiez continuer à cracher sur tous ceux qui sortent des écoles... Mais nous on doit vous croire sur parole.
Vous avez réussis, les autres échouent.
Vous avez raison, on a tort.
Un peu ... simpliste, non ?
Ca c'est bien vrai ,et c'est assez général en robotique :l'intelligence artificielle ça fait mousser le cerveau à pas mal de monde ,mais à part du blabla et des tartines pseudo philosophique indigeste ,bin y'a jamais rien de concret.
Pourtant une bête plateforme mécanique de base suffirait à démontrer l'efficacité d'une AI.Suffit de voir le premier prototype de AIBO (qui pour moi reste une référence en matière d'IA qui a été réellement implanté ,qui plus est sur une jolie plateforme mécanique .Les propriétaires eux-même étaient parfois sidérés par les réactions de leur petit robot qu'il possédaient pourtant depuis des mois).
Premier prototype d'AIBO pour tester les algorithmes : un très moche hexapode

Source
Alors quand j'entends qq'un dire qu'il possède LE programme d'intelligence artificiel ,je peux pas m'empêcher de penser :"bin comme d'hab' y'a que du blabla quoi ,même pas une démo "et je passe à autre chose.(surtout quand c'est expliqué sur le ton du dénigrement....)
#43723 Recharger un accu avec arduino
Posté par
sur 26 mai 2012 - 10:03
dans
Electronique
Bonjour ! Mon accu est en 3 parties de 3.7v nimh. Je l'ai récupéré sur un pc portable. Si mon principe ne fonctionne pas, je pense acheter un chargeur.
C'est pas du nimh !C'est pas parceque c'est rond que c'est du nimh

C'est plus prudent d'acheter un chargeur en effet ,mais tu devras passer par une prise d'équilibrage ,et là faudra pas te planter pour brancher tout ça...risquée ta manip' quand même ,c'est comme ça que la légende des lipo qui pètent perdure ,et là tu vas au devant de grosses frayeurs à vouloir bidouiller cet accus ....
Avec du lipo ,le moindre court-jus c'est batterie morte à coup sure ,avec au mieux un gonflement dans les minutes qui suivent ,et au pire un dégazage de la lipo avec risque que ce gaz s'enflamme...et là...
Perso je serais toi j'achèterais une "vrai" lipo équivalente (3S) en même temps que ton chargeur .
Voici une vidéo d'une batterie trop chargée (avec un chargeur en 19V?^^),ce qui est moins violent qu'un court-circuit et voilà ce qui se passe ...à toi de voir

http://www.youtube.com/watch?v=YCWdnjLqVWw
Les lipo c'est une super techno sans risque ,mais faut bien savoir ce que l'on fait quand on commence à vouloir les modifier !
#43699 Recharger un accu avec arduino
Posté par
sur 25 mai 2012 - 05:07
dans
Electronique
C'est un testeurT'as ça c'est en Anglais et je ne l'ai pas testé (je compte le faire) mais ça a l'air bien
Chargeur universel
A+
#43672 Recharger un accu avec arduino
Posté par
sur 25 mai 2012 - 11:43
dans
Electronique
Hello !Personne n'a d'idées ?
Je ne sais pas quel est le type de ton accus (11,1v ca me ferait penser à du lipo 3S),mais sache que balancer du 19V en attendant que ton pack arrive à 12,2v c'est une très mauvaise idée !
Dis nous quel est le type d'accus et on pourra te répondre ,mais j'ai bien peur que ce soit délicat ,notemment au niveau détection fin de charge.
#42909 Faire un hélicoptère
Posté par
sur 13 mai 2012 - 09:45
dans
Drone, Robot volant, et autres machines volantes
Euh désoler fredoO je n'ai rien comprit je suis jeune et je débute mais as tu un lien ou il explique un peu tout car la au pire j'en achète un et je l'étudie
Salut !
Sans vouloir te décourager ,réaliser soi-même la mécanique complète d'un hélicoptère c'est juste impossible ,même pour le bricoleur chevronné possédant un atelier sur-équipé !
Et admettons que tu réussisses ,si tu n'as jamais piloté d'hélico ,tu seras découragé lors du première essai lorsque ton boulot sera réduit en miette au premier crash
Ou alors tu peux utiliser les pièces mécanique du commerce et réaliser toi même le châssis afin d'y intégrer ton application (comme tu post sur un forum robotique j'imagine que ton hélico aura des fonctions spécifiques).
Je te conseil de zieuter du coté des T-rex ,les pièces se trouvent à foison et pour pas cher sur internet et ce dans différentes classes (du 250 au 600)
Pour te faire la main pour le pilotage je te conseil vivement un petit Blade MCX ,c'est indestructible et très formateur pour passer ensuite à plus sérieux.
Dommage que tu es abandonné le quadricoptère ,parceque ça c'est très facile à réaliser mécaniquement ,et le programme d'asservissement (plusieurs sources libres existent sur internet ) est facilement bidouillable pour une application robotique.Et en cas de crash au pire tu changes une hélice et ça repart !
Bref ,à toi de voir.
#42822 Faire un hélicoptère
Posté par
sur 11 mai 2012 - 06:21
dans
Drone, Robot volant, et autres machines volantes
Bonjours je m'excuse d'avoir fait un peu n'importe quoi sur mon ancien post mais la je suis bien décider de se que je vais fair : un hélicoptère.
Par contre je voudrais bien savoir comment faudrait t'il faire pour le faire tourner mais je vous montre le matos que j'ai vu:
Le moteur:http://www.e-modelisme.com/a221213-brushless-moteur-outrunner-p-1621.html
Je pense qu'il faut un ou deux giro:http://www.e-modelisme.com/hm060z42-gyroscope-helicoptere-p-16969.htm
La batterie: http://www.e-modelisme.com/t22002s208933-batterie-lipo-turnigy-2200mah-20c-p-17054.html
L'accelerometre je pense pas que c'est sa: http://www.e-modelisme.com/variateur-brushless-30a-p-1637.html
Et puis je pense qu'il faut une carte arduino je complèterai le reste du post un peu plus tard merci et à bientôt
Décidément tu veux mettre de moins en moins d'hélice à ton projet

Ton lien sur l'accéléromètre sa renvoi sur un contrôleur .
Si ce que tu appels hélicoptère c'est le truc avec un gros rotor principal et un anti-couple et que tu veux le concevoir toi-même ,je crois que tu devrais te documenter sur le fonctionnement mécanique de ces engins avant de songer au moteur...
Sinon pour faire "tourner" un hélico c'est soit anticouple en stationnaire ou très basse vitesse ,soit c'est du roulis + du tangage + un peu de soutien à l'anticouple éventuellement (dépend du mode du gyro) le tout bien dosé pour prendre une belle courbe en translation rapide.
Tu vas le stabiliser avec une barre de bell ou des palettes de hiller?A moins que l'accéléromètre c'est pour faire du flybarless?
Pas fixe ?Variable?coaxial?Quel type de plateau cyclique?Anti-couple avec petit moteur ,entrainé par courroie ,transmission?
Bref il manque l'essentiel des infos si tu veux qu'on t'oriente.
#42710 Quadricoptére
Posté par
sur 10 mai 2012 - 10:17
dans
Drone, Robot volant, et autres machines volantes
Malgré un long week-end je n'ai pas eu le temps de regarder les batteries et télécommande, je le ferais ce week-end si j'ai le temps.
Par contre j'ai une question : Comment se contrôle les ESC ? PWM ?
Un ESC se contrôle exactement comme un servomoteur , donc pour programmerr tes ESC et bien il faut que tu les considères comme de simples servos
Une petite précaution à inclure dans ton programme ,régler la vitesse des ESC à 0 dès la mise sous tension ,car le démarrage intempestif des moteurs ,sur un quadri ,ça surprend toujours
Petite question :as-tu déjà vu comment fonctionne un multicoptère ?Par exemple pour lancer et couper les moteur?(même gaz au mini les moteurs tournent toujours ,alors faut faire une séquence aux manettes pour couper/lancer la rotation des moteurs)Ca pourrais t'aider pour ton programme !
#42365 Quadricoptére
Posté par
sur 05 mai 2012 - 07:46
dans
Drone, Robot volant, et autres machines volantes
Moi je suis anti LiPo (et oui je l'avoue, et je le vis bien)
Pourquoi?
-j'ai pas envie de mettre le feu à mon garage
-j'ai pas envie de payer 50€ la batterie, 50€ le chargeur, + pleins d'accessoires pour surveiller la charge/la décharge
-j'aime bien que mes accus durent dans le temps (le LiPo, que ça soit utilisé ou pas, ça s'use vite)
-je n'ai pas obligatoirement besoin d'une telle densité d'énergie au kilo (le seul avantage du LiPo/LiFe/dérivés selon moi)
-Pour moi, le standard c'est 12V (Pb) ou 5V(env. 4*NiMh), et pas n*3.7V, qui nécessite des régulateurs (qui rajoutent du coût si on veut de la qualité)
Le Nickel n'est pas obsolète, et la batterie au plomb encore moins. Tout est une histoire de compromis, et quand le poids ne rentre pas en jeu, je déconseille le lithium; après pour les appareils volants c'est assez difficile de s'en passer en effet. Mais pour le reste, c'est le seul avantage que je lui donne...
A part le fait qu'il faut effectivement un régulateur de tension spécifique capable de surveillé le voltage pour ne pas trop décharger a lipo (UBEC),tout tes autres argument sont faux ,infondés (les tarifs...) et issu de légendes urbaine ^^(les lipo qui dure pas dans le temps?Ya même pas d'autodécharge !?)
Mais je suis d'accord avec toi que pour un bon gros robot sur roues le plomb est top et que son rapport prix/Ah est imbattable !
#42353 Quadricoptére
Posté par
sur 04 mai 2012 - 09:22
dans
Drone, Robot volant, et autres machines volantes
Oui n'hésite pas à investir de ce coté (lipo + chargeur) ,si tu ne poursuit pas ce projet ,ton investissement pourra toujours servir dans un autre projet de robotiqueCe week-end je vais regarder les batteries que j'ai sinon ben j'en ajouterai une a mon panier.
Les ni-mh c'est complètement obsolète ,cependant je remarque en parcourant les forums robotique amateur que ça reste encore une référence... j'avoue ne pas comprendre cette persistance à utiliser une techno complètement dépassé au niveau de l'alimentation alors que c'est un point crucial dans la conception d'un robot et qu'une techno nettement supérieur existe !
En modélisme cela fait plusieurs années que les lipo sont omniprésentent ,mais dans le domaine pointu qu'est la robotique où l'optimisation est le maitre mot ,ça semble encore être un sujet tabou... très paradoxal non?

#42322 Tricoptere
Posté par
sur 04 mai 2012 - 06:04
dans
Archives
Ton lien ne fonctionne pas :/Desoler de refaire un post mais dans l'autre j'ai un peu fais n'importe quoi et puis voilà donc je vais finalement faire un tricoptere je vais faire le châssis moi même et en moteur j'ai trouver sa
http://translate.google.fr/translate?hl=fr&sl=en&u=http://www.hobbyking.com/&ei=Tf6jT-bdGLDY4QSGnKCoCQ&sa=X&oi=translate&ct=result&resnum=1&ved=0CGwQ7gEwAA&prev=/search%3Fq%3Dhobbyking%26hl%3Dfr%26client%3Dsafari%26tbo%3Dd
Es-que c'est bon comme moteur pour un tricoptere?
J'ai lu ton autre post et tu dis qu'un tri c'est plus simple.N'oublie pas qu'un tricoptère nécessite un petite partie mécanique avec un servomoteur pour contrer le couple des moteurs ;)Un quad c'est plus simple mécaniquement (les couples s'annulent naturellement) mais c'est vrai qu'un tri ça a de la gueule ^^
Je donnerais le même conseil que sur l'autre post concernant un quadricoptère :avant de choisir les moteurs ,réfléchi à ce que tu veux faire de ton tricoptère et quelles dimension tu souhaite qu'il est !
Tu vas utliser une carte de commande toute faite?
#42314 TOY ,le Robot Chien
Posté par
sur 04 mai 2012 - 05:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Intriguante ton idée de déco... si tu souhaite en dire plus ma boite à MP est ouverteFranchement je suis très intéressé par les deux denier projets cités ^^ je pense que je me laisserai bien tenté par un joli bocal ( mais plus tard ^^ ) et pour la question déco j'ai en plus une Idée toute simple d'objet déco fun qui pourrait être intéressante =) et qui pourrait être sympas car à monter soit même ! ^^
#42307 TOY ,le Robot Chien
Posté par
sur 04 mai 2012 - 04:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu fais de très joli projet entre le chien et le quadricoptère, c'est génial. En as tu fais d'autre ?

Parmis mes nombreux projets ,j'en retiendrais 2 qui tiennent la route...
Mon serveur web ,qui après pas mal de changement c'est finalement fixé sur un macmini ,qui bien avant le Mac Mini Serveur officiel d'Apple stocke des sites et un petit Cloud (owncloud)perso depuis pas mal d'années.
macminiserveur.com
Le site bouge pas trop car c'est plutôt le coté technique de mise en place d'un serveur qui me plait
(alors que je pourrais m'en servir pour partager mes autres passions...)Et aussi une autre passion plus orienté biologie ,celle des écosphères ,qui consiste à maintenir la vie dans un environnement totalement clos.J'ai pour l'occasion fais un petit site (hébergé sur macminiserveur évidemment
) qui est à ma connaissance le seul site francophone à traiter de ce sujet passionnant.Le projet TOY me prenant tout mon temps libre depuis qq mois ,ce site commence à décliner malgré une fréquentation inattendu qui aurais dû me motiver à m'en occuper d'avantage 
DIY-Ecosphere



J'ai aussi un projet qui peut devenir sérieux : "la décoration interactive communautaire".Sans rentrer dans les détails ,il s'agit d'un objet de décoration dont l'aspect peut-être modifier grâce à l'intervention d'internautes de tout les coins du monde :)Voir un objet déco changer d'aspect en se disant que c'est qq'un qq part dans le monde qui à agit dessus est une perspective que j'aime

Fin du HS
#42265 Quadricoptére
Posté par
sur 04 mai 2012 - 02:58
dans
Drone, Robot volant, et autres machines volantes
A ok merci mais j'ai déjà plusieurs batterie et je pense que je vais m'en servir (c'est des batterie de voiture radio-commandé mais ça fera l'affaire pour commencé) et je crois que tu n'a pas vu la fin de post donc je repose la question :
est ce qu'il est possible de calculer la force que les moteurs vont pouvoir soulever ?
Batterie de voiture....c'est pas du ni-mh j'espère parceque même pour commencé ça n'ira pas
 Surtout au début ,pendant la période de mise au point ,tu auras à peine le temps de faire un réglage que celui-ci sera déjà faussé par ces pauvre ni-mh qui vont s'écroulé en point de temps !
Surtout au début ,pendant la période de mise au point ,tu auras à peine le temps de faire un réglage que celui-ci sera déjà faussé par ces pauvre ni-mh qui vont s'écroulé en point de temps !Je n'ai pas de calcul sous la main ,mais sache que j'ai environ 440W et qu'avec ses 1,3kg mon quad grimpe au ciel avec une sacrée patate.Toi tu aura 600W !
Avant de choisir définitivement les moteurs ,tu devrais déjà te poser la question du poids final ,mais pas l'inverse.
#42247 Quadricoptére
Posté par
sur 04 mai 2012 - 02:28
dans
Drone, Robot volant, et autres machines volantes
Oh pardon je me susi mal exprimé !J'ai pas encore trop regardé les hélices mais qu'est ce que tu entends par 3S / 4S ? (3 pales / 4pales ?)
Et merci pour toutes vos réponses.
Pour les hélices ils préconise du 11x7ou 10x5 .Selon le poids et les dimensions de ton quadri faudra faire un choix parmis ces deux tailles.(mon quadri fait 45cm en diagonal pour 1,3kg et les 10x5 marchent du tonnerre)
Quand je dis 3S ou 4S c'est le nombre d'éléments de ta batterie lipo.Si tu peux ,préfère le 4S ,ton expérience du quadri n'en sera que meilleur.
#42239 Quadricoptére
Posté par
sur 04 mai 2012 - 02:04
dans
Drone, Robot volant, et autres machines volantes
J'ai vu une vidéo ou l'accéléromètre servait à déterminer dans quelle position était une carte (dommage je la retrouve plus, je vais essayé de chercher), je m'explique :
le mec avant une arduino + un accéléromètre et quand il inclinait le tout on voyait à l'écran de son PC dans quelle postion était l'arduino
Sinon je veux bien acheter un gyroscope à trois axes mais comment je fais pour souder ça.
Et toi Fredoo tu te sert juste du GPS pour que ton drone reste en stagnation quand tu ne touche rien ?
EDIT : Sinon il y a ça aussi.
Il existe des cartes spécifiques pour développer avec ce genre de composant insoudable pour l'amateur ---->carte avec 6050 (ah ,je vois que tu as trouvé
)Gyro + acc c'est fort conseillé pour du multi :ça permet une remise à plat du modèle en lâchant les manches ,et trois axes suffise ,le MK , à 3 gyro/1 ACC 3-axes en version de base.
Je me sert du GPS pour la sécurité notamment :perte de contrôle ,avarie sur la réception ,et ça peut sauver quand on se perd après une longue ballade en FPV.
Le GPS permet de ne plus se préoccuper du pilotage pendant une prise de vue.
C'est optionnel mais ça permet un pilotage plus serein quand on envoie qq milliers d'euros en l'air (l'engin en lui-même + un bon APN ou une caméra numérique accroché dessous avec une nacelle compensée du commerce tout carbone par exemple ...)
(ah au fait ,tes moteurs sont top!prends bien les hélices préconisée.Il semble n'accepter que du 3S...je me demande s'ils ne tolèrent pas le 4S ,à voir car passer de 3 à 4S c'est le jour et la nuit niveau patate et autonomie.)
#42232 TOY ,le Robot Chien
Posté par
sur 04 mai 2012 - 01:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Si ton programme est bien fait, tu as du faire la cinématique inverse de tes jambes, ce qui veut dire que tu n'as juste que 3/4 constantes a changer et ca doit marcher direct non ? ^^
J'avais fait ca pour mon hexapod et si je changeais la taille, c'etait juste 2/3 constantes a changer et ca remarchait direct.
Je ne sais pas ce qu'est de la cinématique inverse mais ça à l'air très intéressant !Tu pourrais m'en dire plus ?(en passant ton hexa est impressionnant ,j'adore sa capacité à s'adapté à l'inclinaison!!!)Je pense que tu pourrais m'en apprendre long quand à la gestion des servos pour mon quadrupède !
Pour ma part ,c'est de la programmation brute des mouvements qui ressemble à ça :
SUB_marcheav BEGIN 20 6 20 3 20 12 20 9 SPEED SPEED SPEED SPEED 30 1 SPEED #AVG 4500 1 SERVO 400 DELAY 10 1 SPEED 5800 1 SERVO #AVG 30 7 SPEED 5200 7 SERVO #ARD 400 DELAY 10 7 SPEED 4300 7 SERVO #ARD 30 4 SPEED #AVD 6500 4 SERVO 400 DELAY 10 4 SPEED #AVD 5500 4 SERVO #AVD 30 10 SPEED 5500 10 SERVO #ARG 400 DELAY 10 10 SPEED 6500 10 SERVO #ARG REPEAT
Alors pour modifier un simple servo inversé il faut que je reprenne en compte le neutre ,le sens (qui n'est pas le même d'un servo à l'autre) et les positions de chaque mouvement.En gros c'est lourd ,il faut un minimum d'organisation pour pas se mélanger les pattes
 Alors si une solution plus simple existe pour générer les valeurs de position ,je serais bien heureux surtout pour la suite !
Alors si une solution plus simple existe pour générer les valeurs de position ,je serais bien heureux surtout pour la suite !Au fait rappel nous : c'est quoi le cerveau de ton futur copain ?
Son cerveau c'est mon ordi !
J'utilise une carte EZB .
Elle n'est pas très connue ,mais elle permet de faire des choses vraiment sympa .
Seule petite contrainte ,elle nécessite en permanence un ordinateur à proximité.
#42200 Quadricoptére
Posté par
sur 04 mai 2012 - 08:24
dans
Drone, Robot volant, et autres machines volantes
très impressionnat !! franchement chapeau ! Juste pour info, monter un bête pareil ça t'a couté combien ?
Lol ,j'ose pas calculer....
Mais en gros ,je dois être aux alentours des 2000€ ,en sachant que je possédais déjà la radiocommande et le chargeur lipo.
Les principaux organes de ce quadri sont :
-Un kit de base mikrokopter quadri.lien
-Des hélices de meilleur qualité .lien (2 normales + 2 "reverse" ,puis ajouté les moyeu qui vont bien)
-Un module émetteur/récepteur RC UHF long distance (pour la robustesse de la liaison)lien (le modele que je possède ne semble plus exister ,il étais bien plus cher (dans les 250USD)!! ,mais en gros c'est ça)
-Un émetteur vidéo relativement puissant lien et le récepteur qui va bien avec antenne patch 8dbi
-Une radio graupner MX-12
-Pas mal de petits accessoire de montages (fils électrique ,gaine thermo ,plaque carbone ,section alu ,entretoise nylon ,etc etc)
-Un module d'incrustation des données sur la vidéo (OSD) ,compter 100€
Una caméro vidéo miniature (compter dans les 80€ pour du bon mats ,la mienne est vieille et pas d'une qualité génial)
-Une lipo 4S3300 et 3 en 2500 (de la marque hypérion ,ma marque fétiche pour les lipos^^)
Voila en gros ^^
C'est un gros investissement ,mais quand on a gouté au multirotor on arrête d'acheter un petit avion en mousse par-là ,un petit hélico par-ci...et avec le GPS ,c'est juste magique ,si on panique on lâche les commande et il se stabilité là ou il est.Pour le faire revenir vers soi ,on enclenche un switch sur la radio et il reviens gentiment

Pour la vidéo et la photo c'est top aussi ,mais il y a un gros gros travail a faire pour supprimer les vibrations.
http://www.youtube.com/watch?v=2NBe22aIv1A&feature=plcp
http://www.youtube.com/watch?v=gUBxoBCIKB8&feature=plcp
A la fin de cette vidéo (8:00),je montre ce qu'il se passe si l'émetteur radio est coupé.

mes photos sont trop grosse ,on peut réduire la taille dans l'éditeur? (en imposant des dimensions?)
#42196 TOY ,le Robot Chien
Posté par
sur 04 mai 2012 - 07:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour les encouragements !!
Je travail plutôt au feeling et pas de manière forcément très ordonnée alors je suis pas doué pour me tenir à une chronologie
Ce qui est certain ,mon objectif principale du moment c'est de finir la partie mécanique
-Je dois refaire le petit châssis en bois tenant les 4 servos d'épaule (futaba s3010) ;il faut que je le fasse plus court ,et que j'inverse les servos (la partie longue à l'intérieur) ,ce qui va nécessité de retoucher les programmes de démarche (bweurrkk ,prise de tête en perspective...)
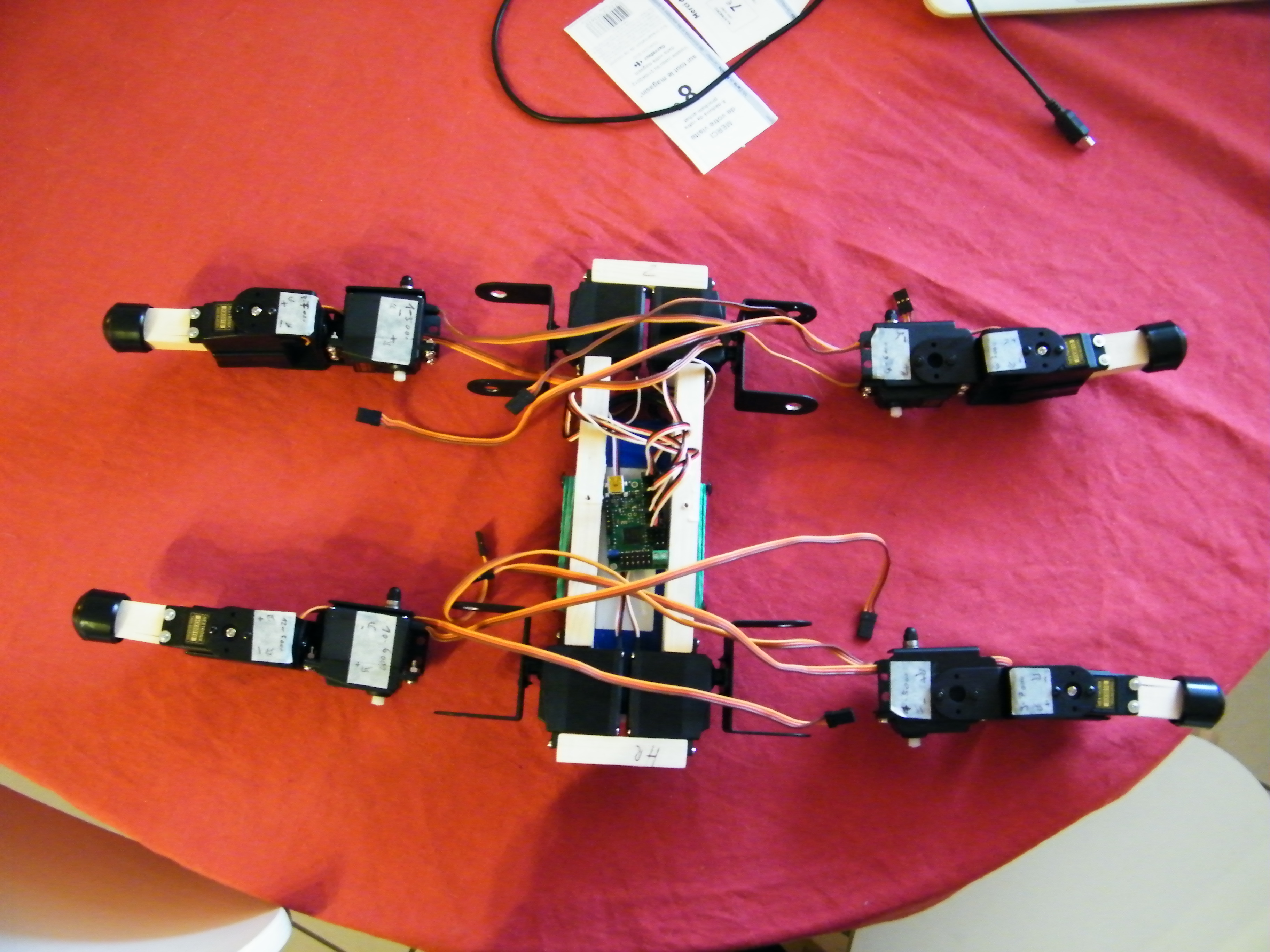
La base mécanique
Ensuite je ferais la carapace en PVC ,dont les formes se feront ...au feeling En faisant des test au préalable avec du papier.
En faisant des test au préalable avec du papier.
Pendant que je ferais cela ,il faudra en même temps que je prenne en compte le cou ,à la hauteur de l'axe de la base et du haut (tête).
Le cou est composé d'une rotation droite/gauche à la base et une articulation haut/bas ,puis une autre articulation haut/bas au niveau de la tête.Pourquoi 2 articulation haut/bas?Et bien pour que la tête conserve un position naturelle selon qu'il soit assis ou debout.
J'aurais besoin de vos compétence en électronique pour modifier mon capteur son :c'est ce capteur et je dois dire que je suis bien déçu ,même à sensibilité maximale il faut hurler dedans ou claquer des mains comme un fou pour qu'il réagisse timidement ,il est donc pas du tout utilisable en l'état (je me demande même à quoi il peut bien servir en fait ...ah si ,capteur d'explosion atomique ).J'ai lu sur les commentaires du lien donné qu'il est possible de remplacer une résistance .Je pense avoir un idée de laquelle ,mais je vous demanderais confirmation !
A bientôt les robot-maker
Le capteur sur le dos c'est ce capteur .Il marche vraiment bien ,très sensible au travers mes plaques PVC.Cependant je suis pas contre ton idée car j'aimerais peut-être en rajouter un dans la tête.Je dis peut-être car avec la caméra ,le sharp et le servo de bouche la place est compté la dedansPs : juste comme ça : tu as pensé à quoi comme capteur pour le dos ? j'ai peut être une idée pour toi ^^ mais bon je pense qu'on en reparlera en temps et en heure
ça serait sympas si tu faisais genre un planning chronologique des choses que tu vas faire ( pas de dates ) juste l'ordre de tes étapes en commençant par ce qui a déjà été fait puis ce que tu es en train de faire et puis ce que tu vas faire étape par étape ensuite
On pourra par exemple interagir sur la cohérence de la succession des étapes et on aura plus d'informations sur les contraintes à tenir etc ... en fonction de ce qui a été fait et de ce qui va être fait ensuite
Je travail plutôt au feeling et pas de manière forcément très ordonnée
alors je suis pas doué pour me tenir à une chronologie Ce qui est certain ,mon objectif principale du moment c'est de finir la partie mécanique
-Je dois refaire le petit châssis en bois tenant les 4 servos d'épaule (futaba s3010) ;il faut que je le fasse plus court ,et que j'inverse les servos (la partie longue à l'intérieur) ,ce qui va nécessité de retoucher les programmes de démarche (bweurrkk ,prise de tête en perspective...)
La base mécanique
Ensuite je ferais la carapace en PVC ,dont les formes se feront ...au feeling
En faisant des test au préalable avec du papier.Pendant que je ferais cela ,il faudra en même temps que je prenne en compte le cou ,à la hauteur de l'axe de la base et du haut (tête).
Le cou est composé d'une rotation droite/gauche à la base et une articulation haut/bas ,puis une autre articulation haut/bas au niveau de la tête.Pourquoi 2 articulation haut/bas?Et bien pour que la tête conserve un position naturelle selon qu'il soit assis ou debout.
J'aurais besoin de vos compétence en électronique pour modifier mon capteur son :c'est ce capteur et je dois dire que je suis bien déçu ,même à sensibilité maximale il faut hurler dedans ou claquer des mains comme un fou pour qu'il réagisse timidement ,il est donc pas du tout utilisable en l'état (je me demande même à quoi il peut bien servir en fait
...ah si ,capteur d'explosion atomique ).J'ai lu sur les commentaires du lien donné qu'il est possible de remplacer une résistance .Je pense avoir un idée de laquelle ,mais je vous demanderais confirmation !A bientôt les robot-maker
#42175 Quadricoptére
Posté par
sur 03 mai 2012 - 08:12
dans
Drone, Robot volant, et autres machines volantes
Hello !
Je te conseil un bon lien pour t'informer :http://www.mk-fr.info/forum/index.php
C'est très orienté MK (la marque à travers laquelle la mode des multicopters est née) mais tu trouvera d'autre plateforme plus dans l'esprit de ce que tu veux faire ,à base d'arduino)
Premier point qui m'embête ,c'est le KV de tes moteurs :il est bien trop haut !En multi on choisi des KV bas ,genre 800 à 1100.Pourquoi?Parceque la stabilité d'un multirotor est régie (entre autre)par la capacité des moteurs à réagir précisément pour corriger l'assiette ,donc plus le Kv est bas ,meilleur sera la résolution de correction (3000Kv c'est 3000T/min par volt ,ce qui est moins précis que 800Kv ->800T/min par volt)
Ensuite ,la commande par bluetooth c'est pas top :ces petites bêtes ça part vite et en moyenne le BT c'est 10m de porté.Il existe des module 100 et 1000m ,mais c'est plus cher et vaut mieux bien programmer son protocole de communication pour ne pas voir son engin partir au loin sans pouvoir rien faire...
Un arduino (arduino pro mini) ça peu faire voler un multi sans problème http://www.multiwii.com/ (par exemple)
Tu as trouvé quel code toi?
Le secret d'un bon multi réside dans ces quelques points :
-chassis léger et TRES rigide
-De bons moteurs de qualité et des hélices bien équilibré
-Une électronique/programme qui tient la route pour bien filtrer les vibrations
-une batterie costaud en 4S (évite le 3S le rendement est pas des meilleurs pour cette application) avec une capacité bien calculé (je dis ça mais perso j'y vais au feeling)
Ces point sont important car 4 moteurs/hélices qui tourne en même temps ,même bien équilibré ,ça rentre en résonance et ça créé des harmoniques que le programme doit savoir gérer (PID ,filtre kalman ...)
Le multicopter c'est vraiment génial !Mais sur un forum robotique tu ne trouvera pas toutes les info ,car ça reste du modélisme ,du modélisme des années 2000 certe
Cependant ,si tu as d'autres questions hésite pas !
Voici un petite vidéo (accélérée) de ce que j'ai fais avec mon quadricopter ,avec GPS et tout .J'ai pas trouvé d'équivalent sur le net d'une telle distance parcouru en quadri ,et je vais amélioré mon record cet été pour atteindre les 4KM (en quadri c'est énorme mais il faut savoir qu'en motoplaneur RC certains barges atteignent les 100km de distance en FPV !!!!)
http://www.youtube.com/watch?v=uRj10aSRfVE&feature=plcp
Je te conseil un bon lien pour t'informer :http://www.mk-fr.info/forum/index.php
C'est très orienté MK (la marque à travers laquelle la mode des multicopters est née) mais tu trouvera d'autre plateforme plus dans l'esprit de ce que tu veux faire ,à base d'arduino)
Premier point qui m'embête ,c'est le KV de tes moteurs :il est bien trop haut !En multi on choisi des KV bas ,genre 800 à 1100.Pourquoi?Parceque la stabilité d'un multirotor est régie (entre autre)par la capacité des moteurs à réagir précisément pour corriger l'assiette ,donc plus le Kv est bas ,meilleur sera la résolution de correction (3000Kv c'est 3000T/min par volt ,ce qui est moins précis que 800Kv ->800T/min par volt)
Ensuite ,la commande par bluetooth c'est pas top :ces petites bêtes ça part vite et en moyenne le BT c'est 10m de porté.Il existe des module 100 et 1000m ,mais c'est plus cher et vaut mieux bien programmer son protocole de communication pour ne pas voir son engin partir au loin sans pouvoir rien faire...
Un arduino (arduino pro mini) ça peu faire voler un multi sans problème http://www.multiwii.com/ (par exemple)
Tu as trouvé quel code toi?
Le secret d'un bon multi réside dans ces quelques points :
-chassis léger et TRES rigide
-De bons moteurs de qualité et des hélices bien équilibré
-Une électronique/programme qui tient la route pour bien filtrer les vibrations
-une batterie costaud en 4S (évite le 3S le rendement est pas des meilleurs pour cette application) avec une capacité bien calculé (je dis ça mais perso j'y vais au feeling)
Ces point sont important car 4 moteurs/hélices qui tourne en même temps ,même bien équilibré ,ça rentre en résonance et ça créé des harmoniques que le programme doit savoir gérer (PID ,filtre kalman ...)
Le multicopter c'est vraiment génial !Mais sur un forum robotique tu ne trouvera pas toutes les info ,car ça reste du modélisme ,du modélisme des années 2000 certe
Cependant ,si tu as d'autres questions hésite pas !
Voici un petite vidéo (accélérée) de ce que j'ai fais avec mon quadricopter ,avec GPS et tout .J'ai pas trouvé d'équivalent sur le net d'une telle distance parcouru en quadri ,et je vais amélioré mon record cet été pour atteindre les 4KM
(en quadri c'est énorme mais il faut savoir qu'en motoplaneur RC certains barges atteignent les 100km de distance en FPV !!!!)http://www.youtube.com/watch?v=uRj10aSRfVE&feature=plcp
#42169 TOY ,le Robot Chien
Posté par
sur 03 mai 2012 - 07:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous !
Je vais vous présenter mon projet de petit robot-chien que j'ai baptisé TOY
Ce robot sera la concrétisation d'un rêve qui me trotte dans la tête depuis des années !
D'abord qu'est-ce que j'attends de ce robot ?
Qu'il soit autonome
Qu'il soit sympa à regarder évoluer
Qu'il est un comportement diversifié
Qu'il soit le plus réactif possible à son environnement
Qu'il puisse avoir un minimum d'interaction avec l'homme
En gros qu'il soit attachant
Techniquement comment vais-je traduire ces attentes :
Autonomie : Pouvoir se déplacer dans son environnement ,un télémètre SHARP dans la truffe pour détecter les obstacles ,et une caméra pour lire le "flashcode"(voir image plus bas) des zones interdites.En effet ,dans mon salon il y a un gros tapis très épais et poilu sur lequel TOY est incapable de marcher ,je devrais donc baliser cette zone comme zone interdite.TOY ne pourras pas s'approcher à plus de 30cm de ce flashcode (seconde utilitée du capteur sharp)
Sympa à regarder évoluer : le mode de déplacement quadrupède d'un robot est en lui même attrayant avec son petit coté maladroit ^^.Son intérêt pour les choses qui bougent le rende aussi très "vivant".La possibilité de jouer à la balle avec lui est aussi un point très attractif.
http://www.youtube.com/watch?v=UTouL6a1DYg&feature=plcp
Le color et motion tracking en même temps rendent le robot très réactif à son environnement
http://www.youtube.com/watch?v=KxDyMRkP6EI&feature=plcp
Test de démarche ,après petites améliorations ,la démarche est déjà plus fluide et "naturelle" que sur cette vidéo.
Après test ,il s'avère qu'il supporte sans broncher une bouteille d'1,5L d'eau sur le dos !!(en plus de ses 1,3Kg)
Parcontre la conso doit en prendre un coup !(2 bouteilles il aime pas et fait du surplace ,mais les pattes ne flanchent pas pour autant ! ^^)
Comportement diversifié : Plusieurs petits systèmes sont mis en jeux pour obtenir un comportement diversifié :
-le premier ,simple ,est la génération d'un nombre aléatoire ,et selon le résultat ,le programme ira pioché dans un des programmes prédéfinis.Par exemple ce rendre à l'endroit le plus lumineux ,s'assoir et faire mine de regarder autour de lui ,etc etc ,les possibilités sont nombreuses.Pour un meilleur rendu de cette fausse personnalité (fausse car tout est préprogrammé finalement) ,le chiffre aléatoire sera choisi dans une large plage ,entre 1 et 9000 voir plus.J'ai fais quelques essais ,certains comportements peuvent mettre plusieurs minutes à être appelé ,ce qui est très intéressant dans cette application.
-Le deuxième système ,plus complexe ,sera un système de scores additionnés dont le résultat donne un niveau de karma.
Pour obtenir ce score ,le programme déclenchera parmis une des actions aléatoires un mode SAT.Le mode SAT c'est pour mode "Super ATtentif".Dans ce mode ,le robot arrête sont activité ,s'assois ,et récupère la valeur actuelle de chaque capteur: luminosité ,bruit ambient ,état batterie etc etc..
Je prédéfini un aspect négatif et positif pour chaque valeur de capteur :par exemple ,une zone éclairé c'est positif donc augmentera le score de 15 points ,l'obscurité c'est pas génial alors baissera le score de 10pts ,etc etc.Le résultat finale donnera une valeur que j'appelle karma.Le karma sera une valeur entre 1 et 255 qui sera stocké en mémoire persistante pour être utilisé même après mise hors tension du robot.Le karma influencera alors le comportement du robot en interdisant l'execution de certaine action ,comme par exemple jouer à la balle ,remuer de la queue si karma trop bas ,ou au contraire préférer la recherche des zones actives ,lumineuses et avec du movements si karma élevé.
Le fait de caresser le robot (capteur capacitif) augmentera systèmatiquement le karma ,même en dehors du mode SAT.
Réactif à son environnement :Capteur luminosité ,caméra numérique (motion et color tracking) ,lecture tension (pont diviseur) ,capteur bruit ,capteur inclinaison (chute)
Interaction avec l'homme :jouer a la balle ,écouter les claquements de mains ,lire les flashcodes ,réagir aux caresse sur le dos ,émettre des sons typique de chien suivant le comportement actuel et éventuellement reconnaissance vocal mais là je bute avec un soucis de compatibilité entre un windows7 anglais et la reconnaissance vocal francophone (ça existe la reconnaissance en francais sous win?)
Où j'en suis actuellement :
Le châssis et la tête sont réalisés.Je me suis aperçu de petits soucis de proportions alors je vais probablement refaire le châssis .Il me reste en priorité à finir la partie mécanique incluant la "peau" ,qui sera faite de plaque PVC de 2mm d'épaisseur.
D'autre détails viendront au fur et à mesure de la réalisation.Malheureusement j'ai 2 à 3H maxi par semaine à consacrer à ce projet ,donc ça risque d'être long
A bientôt les robot-maker

Détail de la truffe

Exemple de flashcode :une fois imprimer sur papier ou T-shirt
,les utilisations sont infinie pour "éduquer le robot !

Le chassis

Intérieur de la tête.

La tête ,manque les yeux ,représentés par 2 LED blanches.
Elle a été réalisée à partir d'une enceinte d'ordinateur de la marque logitech
Je vais vous présenter mon projet de petit robot-chien que j'ai baptisé TOY
Ce robot sera la concrétisation d'un rêve qui me trotte dans la tête depuis des années !
D'abord qu'est-ce que j'attends de ce robot ?
Qu'il soit autonome
Qu'il soit sympa à regarder évoluer
Qu'il est un comportement diversifié
Qu'il soit le plus réactif possible à son environnement
Qu'il puisse avoir un minimum d'interaction avec l'homme
En gros qu'il soit attachant
Techniquement comment vais-je traduire ces attentes :
Autonomie : Pouvoir se déplacer dans son environnement ,un télémètre SHARP dans la truffe pour détecter les obstacles ,et une caméra pour lire le "flashcode"(voir image plus bas) des zones interdites.En effet ,dans mon salon il y a un gros tapis très épais et poilu sur lequel TOY est incapable de marcher ,je devrais donc baliser cette zone comme zone interdite.TOY ne pourras pas s'approcher à plus de 30cm de ce flashcode (seconde utilitée du capteur sharp)
Sympa à regarder évoluer : le mode de déplacement quadrupède d'un robot est en lui même attrayant avec son petit coté maladroit ^^.Son intérêt pour les choses qui bougent le rende aussi très "vivant".La possibilité de jouer à la balle avec lui est aussi un point très attractif.
http://www.youtube.com/watch?v=UTouL6a1DYg&feature=plcp
Le color et motion tracking en même temps rendent le robot très réactif à son environnement
http://www.youtube.com/watch?v=KxDyMRkP6EI&feature=plcp
Test de démarche ,après petites améliorations ,la démarche est déjà plus fluide et "naturelle" que sur cette vidéo.
Après test ,il s'avère qu'il supporte sans broncher une bouteille d'1,5L d'eau sur le dos !!(en plus de ses 1,3Kg)
Parcontre la conso doit en prendre un coup !(2 bouteilles il aime pas et fait du surplace ,mais les pattes ne flanchent pas pour autant ! ^^)
Comportement diversifié : Plusieurs petits systèmes sont mis en jeux pour obtenir un comportement diversifié :
-le premier ,simple ,est la génération d'un nombre aléatoire ,et selon le résultat ,le programme ira pioché dans un des programmes prédéfinis.Par exemple ce rendre à l'endroit le plus lumineux ,s'assoir et faire mine de regarder autour de lui ,etc etc ,les possibilités sont nombreuses.Pour un meilleur rendu de cette fausse personnalité (fausse car tout est préprogrammé finalement) ,le chiffre aléatoire sera choisi dans une large plage ,entre 1 et 9000 voir plus.J'ai fais quelques essais ,certains comportements peuvent mettre plusieurs minutes à être appelé ,ce qui est très intéressant dans cette application.
-Le deuxième système ,plus complexe ,sera un système de scores additionnés dont le résultat donne un niveau de karma.
Pour obtenir ce score ,le programme déclenchera parmis une des actions aléatoires un mode SAT.Le mode SAT c'est pour mode "Super ATtentif".Dans ce mode ,le robot arrête sont activité ,s'assois ,et récupère la valeur actuelle de chaque capteur: luminosité ,bruit ambient ,état batterie etc etc..
Je prédéfini un aspect négatif et positif pour chaque valeur de capteur :par exemple ,une zone éclairé c'est positif donc augmentera le score de 15 points ,l'obscurité c'est pas génial alors baissera le score de 10pts ,etc etc.Le résultat finale donnera une valeur que j'appelle karma.Le karma sera une valeur entre 1 et 255 qui sera stocké en mémoire persistante pour être utilisé même après mise hors tension du robot.Le karma influencera alors le comportement du robot en interdisant l'execution de certaine action ,comme par exemple jouer à la balle ,remuer de la queue si karma trop bas ,ou au contraire préférer la recherche des zones actives ,lumineuses et avec du movements si karma élevé.
Le fait de caresser le robot (capteur capacitif) augmentera systèmatiquement le karma ,même en dehors du mode SAT.
Réactif à son environnement :Capteur luminosité ,caméra numérique (motion et color tracking) ,lecture tension (pont diviseur) ,capteur bruit ,capteur inclinaison (chute)
Interaction avec l'homme :jouer a la balle ,écouter les claquements de mains ,lire les flashcodes ,réagir aux caresse sur le dos ,émettre des sons typique de chien suivant le comportement actuel et éventuellement reconnaissance vocal mais là je bute avec un soucis de compatibilité entre un windows7 anglais et la reconnaissance vocal francophone (ça existe la reconnaissance en francais sous win?)
Où j'en suis actuellement :
Le châssis et la tête sont réalisés.Je me suis aperçu de petits soucis de proportions alors je vais probablement refaire le châssis .Il me reste en priorité à finir la partie mécanique incluant la "peau" ,qui sera faite de plaque PVC de 2mm d'épaisseur.
D'autre détails viendront au fur et à mesure de la réalisation.Malheureusement j'ai 2 à 3H maxi par semaine à consacrer à ce projet ,donc ça risque d'être long
A bientôt les robot-maker
Détail de la truffe
Exemple de flashcode :une fois imprimer sur papier ou T-shirt
,les utilisations sont infinie pour "éduquer le robot !
Le chassis
Intérieur de la tête.
La tête ,manque les yeux ,représentés par 2 LED blanches.
Elle a été réalisée à partir d'une enceinte d'ordinateur de la marque logitech




