Posté par
Posté par
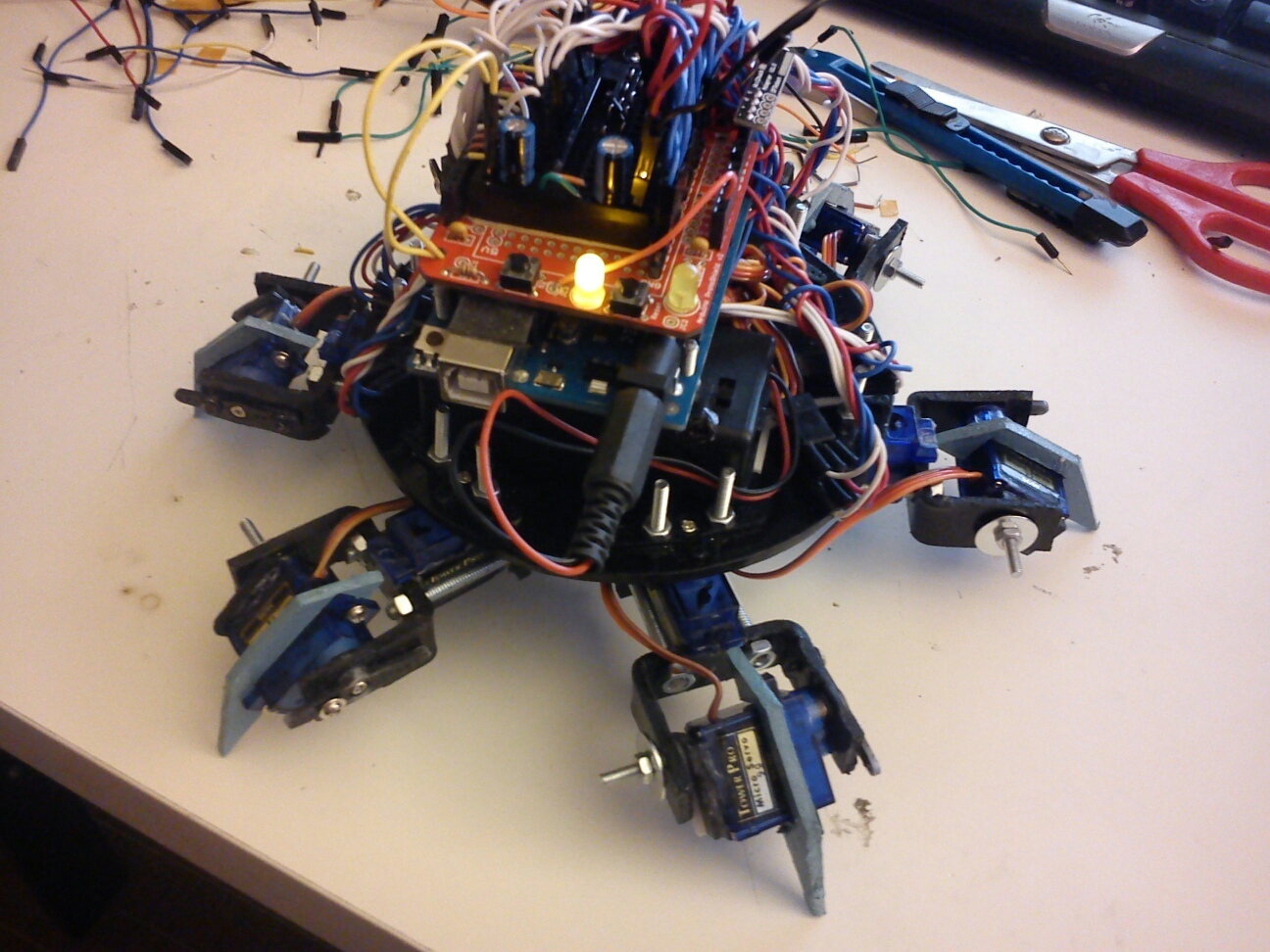
A priori, en termes de code, savoir commander tes servomoteurs en position (librairie servo) devrait suffire si tu peux accéder directement à chacun. À partir de ça, tu peux mettre n'importe quelle patte dans n'importe quelle position. Tu peux d'ailleurs t'amuser à contrôler une patte pour lui faire faire les gestes que tu veux.
Pour ce qui est de marcher, je dirais qu'il y a deux méthodes :
- l'une "expérimentale" : tu cherches comment contrôler les bons mouvements de pattes en testant des valeurs et en regardant quel geste fait la patte. Sachant en suite que la marche correspond à répéter un cycle de déplacement de chacune des pattes, tu peux répéter cette suite de commandes et faire avancer ton robot.
- l'autre est plus mathématique : en utilisant un modèle de la géométrie de ton robot (distances inter-articulations), tu peux raisonner sur la position du bout de chaque patte, et donc la position du "centre" de ton robot, et utiliser l'inverse de ce modèle pour trouver les commandes à appliquer pour déplacer le centre. Cherche des informations sur la cinématique inverse, c'est un domaine bien maîtrisé de la robotique (qui vient du contrôle des bras industriels).
Merci pour ta réponse ! J'ai cherché de chose sur la cinétique inverse et il y a une méga source de mouvement avec cette méthode, je vais étudier, mais pour le moment je pense que je ne suis pas ce niveau de programmation, donc je vais suivre dans un premier temps ton premier conseille =) !
Tu dis " testant des valeurs ", tu veux parler des angles, des degrés, oui une synchronisation avec du temps ?(excuse-moi si je comprends pas trop je suis débutant^^) aurais-tu un petit exemple de programme pour que je puisse l'étudier et comprendre ?
merci et a bientôt