Posté par
Posté par
Merci pour toutes vos réponses.
Les moteurs que j'utilise sont ceux-ci : http://www.gotronic.fr/art-paire-de-servos-roues-s04nfwh-11504.htm
Alimentation: 4,8 - 6,0 Vcc
Couple: 3,5 kg.cm à 4,8 Vcc
Vitesse: 0,15 s/60°
Dimensions:
- servo: 41 x 38 x 20 mm
- roue: Ø38 x 20 mm
Il y en a donc deux.
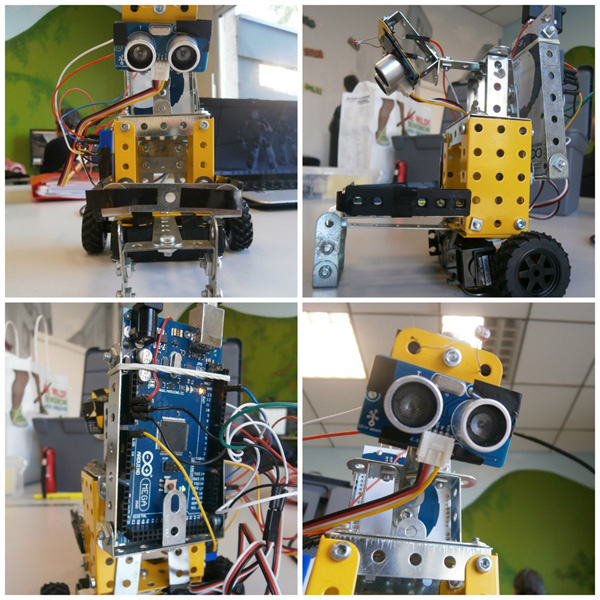
Le robot a deux moteurs, une carte Arduino MEGA et 4 photo-résistances. Je vais essayer de faire le calcul comme proposé plus haut.
Pour le moment, il n'est alimenté que lorsque je le branche sur PC via un câble USB.