C'est pas un cur Iron Man au milieu? 😀
Le design est sympa! Comment comptes tu assembler l'ensemble des pièces? Glue, vises ou jeu fonctionnel?
Contenu de Sparda
Il y a 26 élément(s) pour Sparda (recherche limitée depuis 07-juillet 14)
Par type de contenu
Voir pour ce membre
#103054 Glenn Robot Humanoide
 Posté par
sur 16 avril 2019 - 04:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 16 avril 2019 - 04:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#101319 Robot Quadrupède intelligent.
Posté par
sur 08 janvier 2019 - 08:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je déterre ce super sujet!
Ashira, comment ce robot a avancé en presque 2 ans de temps? Il a tué beaucoup de baudruches?
#69024 R.Ian, un robot open-source très économique, extensible et facile à construire
Posté par
sur 14 avril 2016 - 07:22
dans
Robots roulants, chars à chenilles et autres machines sur roues
Comme le R.Cerda, un beau projet simple de compréhension !
Merci de l'avoir partager 
#65128 Robot Quadrupède intelligent.
Posté par
sur 27 août 2015 - 12:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Cool, tu gagnes déjà un facteur 10 =)
Si tu veux je peux jeter un œil à ton code en MP
Je t'ai mis en hyperlien (dans mon précédant post) l'aide arduino de ces fonctions (après c'est en anglais ^^')
Le Serial.readStringUntil() ne remplace pas le Serial.available() (qui lui sert juste à savoir si tu as des données disponible (>0) et la quantité de données (nombre renvoyé).
Le readStringUntil() peut remplacer le Serial.read() (qui lit et renvoie le premier bit de données disponibles), par une lecture de l'ensemble des données jusqu'à soit un bit (char) de fin que tu renseignes comme argument de fonction. (ou pendant un temps déterminer (avec une seconde instruction Serial.setTimeOut() mais pas utile pour ton projet).
(J'espère que je suis clair)
Pour l'instant, je n'ai pas personnellement implémenter la readStringUntil() dans mon code car je ne lis que trois données toutes les 5ms. La semaine prochaine, je vais tâcher de faire des essais avec celle-ci, et je te ferais un petit retour.
#65126 Robot Quadrupède intelligent.
Posté par
sur 26 août 2015 - 06:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ah oui en effet il fait pas grand chose, tu pourrais "presque" l'enlever ^^'
Mais avec le Serial.availabe() tu n'es pas obligé de fixé un delay derrière, tu peux lire aussi vite que le fonctionnement de la void loop en supprimant ce delay de 1ms (c'est ça que j'appelle en spammant l'instruction dans le void loop).
Si tu as 27 caractères à lire tu peux utiliser Serial.readStringUntil() (en rajoutant un 28ème caractère de fin de chaîne) et l'écrire dans une variable string qui peut être lu comme un tableau dont la dernière case se termine par un null.
#65115 Robot Quadrupède intelligent.
Posté par
sur 25 août 2015 - 11:08
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On y est pas encore! Mais qui sait un jour ^^ sinon, bonne question. En fait faut prendre en compte le robot au complet: Si je traite tout par le pc, il faut retourner toutes les infos des capteurs au pc, et qu'il renvoie les infos pour les moteurs. Alors que la, l'arduino récupère seulement les infos nécessaires du pc, et envoie les infos à une autre carte qui s'occupe des moteurs. Il y a moins d'échange avec cette méthode. Ce qui limite surtout les échanges c'est le delay (actuellement à 1ms) qui est obligatoire à chaque fois que je récupère un caractère du pc. Je vais faire des testes en diminuant cette valeur pour voir si ca fonctionne! Mis à part celui ci, j'ai banni le delay de mon programme
Si je pige bien, le pc ne fait que du travail de haut niveau, (donne la direction à suivre, accélère, stop...) et le travail de bas niveau est fait par l'arduino et la carte moteur (récupérer les angles/positions de chaque moteurs).
Je suppose que ton delay de 1ms est dû à la récupération des ordres venant du pc par l'arduino avec un if (Serial.available() >0) ?
Normalement la communication est de 9600 bauds (soit 9600 caractères par seconde) donc tu peux descendre à 0.1ms en spammant l'instruction dans la void loop. Et tu peux aller encore plus loin (si ton transmetteur/recepteur le permet) en augmentant le baud rate lors du Serial.begin()
#65097 Robot Quadrupède intelligent.
Posté par
sur 24 août 2015 - 07:55
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Waah content de voir que ton projet avance!
Bientôt si tu lances l'objet il court pour aller le chercher, non ? ^^
La vitesse d’exécution n'est pas plus rapide si tu fais tout traiter par le pc embarqué ?
#65003 Base Roulante Mark I
Posté par
sur 08 août 2015 - 03:46
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai pas mal été pris pas le travail ces derniers temps mais j'essaye de trouver quelques moments pour bosser sur MarkII.
Merci mike, ton lien a été très utile pour me remettre les transistor en place.
Du coup, j'ai modifié pas mal de trucs sur le montage.
Pour la diode j'avais complétement zappé de la dimensionner. Mais en prenant un peu de recul, elle doit supporter un courant de 7A, et vu que toutes les diodes admettent une chute de tension allant de 0.4 à 1V, ça nous fait une puissance allant de 2,8 à 7W ce qui est plutôt sympa comme chauffage pour faire un barbecue. La solution que j'ai trouvé est de la remplacé par un MOS à canal P, je pense à un FDS4675, 40V - 11A. Avec une résistance interne annoncé de 0.013Ohms ça fait plus que 0,64W de consommation.
Vu qu'il est vendu en paquet de 5 chez RS, je pense aussi le prendre pour le transistor PNP initialement prévu. Le seul inconvénient c'est qu'il est en version CMS donc faudra que je bidouille un boitier pour me faire une version DIP.
Le gros inconvénient de ce circuit c'est qu'il peut couper l'alimentation en pleine utilisation si il y a une forte chute de tension ou si la batterie se décharge trop en utilisation prolongée.
Donc en ce moment je vais voir si je peux pas le by-passer une fois l'allumage du robot fait. D'ailleurs si vous avez des idées, je suis preneur =D
#64854 Base Roulante Mark I
Posté par
sur 14 juillet 2015 - 12:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
Je commence à mettre en plans à des améliorations pour la seconde version :
Le premier point sera une vraie carte d'alimentation avec les options suivantes :
- Interrupteur général d'alimentation
- Détection de batterie faible, et coupe toute l'alimentation si tension trop faible
- Protection contre l'inversion de polarité (si mauvais branchement de la batterie), le circuit n'est pas alimenté
- 2 Régulateurs 5V 1A pour l'arduino (+ peut être une future raspberry) et pour les capteurs
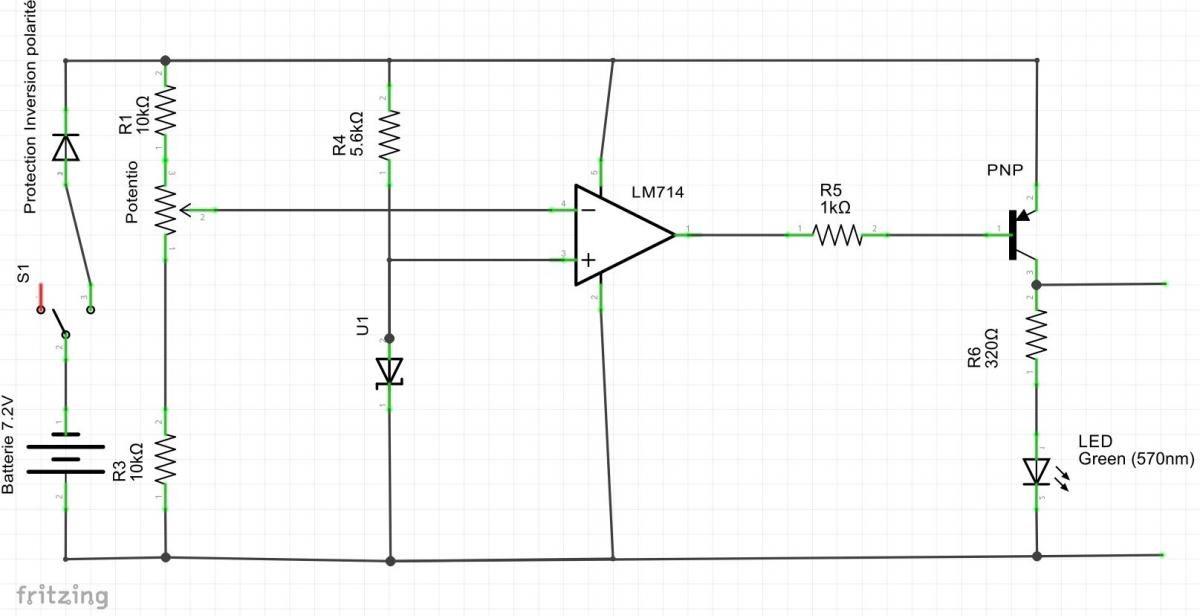
Pour réaliser la détection de batterie faible, un petit montage avec un AOP en comparateur. La tension de référence est fixée par une diode zéner. Un potentio pour ajuster au mieux le seuil de tension faible de batterie : Vseuil = E*[(Rc +R2)/(R1+R2+Rc)]
En sortie de l’AOP, un transistor PNP qui sera bloqué si la tension de sortie est négative (tension de batterie est faible) et passant dans le cas contraire (batterie chargé).
Sur le collecteur du transistor, une résistance et une LED verte pour vérifier d’un coup d’œil l’état du circuit. En parallèle viendra les régulateurs de tensions 5V et l’alimentation des moteurs.
Après pour minimiser l’énergie consommé par le montage, il me suffira d’augmenter la résistance R4 tout en vérifiant que la tension de la diode zéner est reste stable. Il faudra que je fasse quelques essais (malheureusement pas tout de suite)
Le transistor va devoir supporter l’intégralité du courant qui circule dans le montage (moteurs + arduino/capteurs) ce qui peut monter assez haut (1A/moteur en bloqué) donc au max de consommation du 6A je pense.
Je voulais avoir votre avis sur ce schéma, étant donné qu’il sort de mes vieux souvenir d’élec, et aussi que me conseilleriez-vous comme transistors je n’ai pas l’habitude d’en utiliser comme ça?
#64844 Robot Quadrupède intelligent.
Posté par
sur 11 juillet 2015 - 10:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci à toi, ton projet a attiré ma curiosité sur la reconnaissance vocale et d'images;
Je vais voir ça un peu plus en profondeur pour les mettre sur mon prochain robot =)
#64843 Batterie et moteur pour un nouveau robot
Posté par
sur 11 juillet 2015 - 09:33
dans
Conseils et aide aux débutants, livres et kits en robotique
J'avais pris les deux à 7,2V et 1,1Ah parfait pour les moteurs 6V.
Niveau calcul : 3kg, 4cm de rayon => Couple : 12kg.cm, si tu prends quatre moteurs (et en considérant que la répartition de charge est homogène) il te faudrait des moteurs de 3kg.cm. Histoire d'être un peu large tu peux prendre des moteurs à 4kg.cm pour être sûr de ne pas forcé.
Pour ma base mobile avec un poids max de 4,5kg et des roues de 2.1cm de rayon, j'ai quatre moteurs de 2,5 kg.cm.
Ces moteurs ne sont pas très chères mais les pignons sont en plastiques (pas forcément super résistant dans le temps) je te conseillerais plutôt des pignons métalliques (mais c'est plus chères, ça dépend donc de ton budget). Après niveau vitesse c'est du 70rpm, donc au maximum ton robot avancera à 0.29m/s (~1km/h)
Un paramètre à vérifier aussi c'est le "stall current" le courant consommé lorsque le moteur est chargé à son maximum pour ne pas avoir d'ennuis lorsque tu passeras sur la partie commande électronique. Ici c'est du 700mA à 6V donc si tu veux utiliser des L293D ou le SN754410 tu n'auras pas de problèmes puisque ceux-ci accepte des courants maximaux de 1A/canaux.
#64841 Robot Quadrupède intelligent.
Posté par
sur 11 juillet 2015 - 07:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est vraiment du beau boulot !
Une petite question qu'est-ce que tu utilises comme micros ?
#64838 Batterie et moteur pour un nouveau robot
Posté par
sur 11 juillet 2015 - 03:06
dans
Conseils et aide aux débutants, livres et kits en robotique
Y'a beaucoup d'autres sites. Au niveau prix, c'est principalement la capacité de la batterie en elle-même qui le détermine. En général, un pack de Ni-MH fait du bon boulot pour un prix pas trop chère comme tu peux en avoir ici.
Je ne te conseille pas de prendre des piles classiques "jetables" car c'est vraiment une perte d'argent et en plus elles n'ont généralement pas une grande capacité donc il faut les changer souvent.
#64793 Gust4v3
Posté par
sur 07 juillet 2015 - 09:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je reviens sur un ancien post (faudrait que je me connecte plus souvent ^^')
La marche arrière après détection d'obstacle dure trop longtemps, à réduire à 500ms.
Tu peux utiliser ton capteur US pour en déduire la distance entre ton robot et l'objet et après faire un conditionnement en distance plutôt qu'en durée qui est super aléatoire car dépendant du sol et du type d'obstacle.
J'utilise pas de capteur US mais il me semble qu'ils ont une réponse linéaire en fonction de la distance? Si oui, c'est encore plus simple que pour les capteur IR où tu as besoin de faire un étalonnage et de calculer un modèle approximatif.
#64751 Gust4v3
Posté par
sur 30 juin 2015 - 07:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour F6FCO,
Tu devrais continuer à alimenter ton topic car même si on ne poste pas on lit ce que tu fais 
D'ailleurs, j'en profite pour te dire que c'est vraiment intéressant ta démarche de faire un maximum par soi-même, on ne voit plus beaucoup cela malheureusement :/ Pourtant ça coûte moins cher!
(Merci pour l'astuce de la roue avec la poulie d'imprimante, j'en ai quelques unes dont je ne savais que faire chez moi =D)
#64750 Batterie et moteur pour un nouveau robot
Posté par
sur 30 juin 2015 - 06:51
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut,
Pour commencer, il te faut choisir ton alimentation et surtout son voltage. Apparemment tu travailles avec une Arduino Uno qui peut prendre en entrée des tensions allant de 7 à 12V pour fonctionner. Ensuite la capacité (en mAh) de la batterie est déterminer par l'autonomie que tu veux pour ton robot (10minutes,..., 1heure... avant d'être HS), et celle-ci est conditionné par ce que tu vas brancher dessus: capteur IR/US, moteur, caméra... Pour calculer l'autonomie, c'est pas compliqué, il suffit d'additionner la consommation(mA) de chaque composant et ensuite de diviser la capacité de ta batterie par la consommation.(Exemple : 2 moteur consommant à vide 500mA + Arduino Uno 100mA, 1100mA, pour une batterie de 2200mAh, ça te donne une durée de 2h). Généralement essaye d'avoir une vision plus pessimiste possible pour avoir la plus faible autonomie possible. Dans mon exemple, les moteurs consomment 500mA à vide mais une fois monté sur ton robot, ils consommeront beaucoup plus...
Une fois, la tension de ta batterie choisie, tu peux t'orienter sur des moteurs de même voltage nominal ou de plus faible voltage mais dans ce cas tu auras besoin d'un composant abaisseur de tension.
Pour le choix de des moteurs, il y a beaucoup de considérations différentes suivant ce que tu veux mais tu peux faire une grosse approximation en utilisant la masse finale de ton robot. Une fois cela fait, il te faut déterminer quel couple tu as besoin pour le faire démarrer et à quelle vitesse tu veux faire avancer ton robot.
Pour calculer la vitesse de ton robot dépend du diamètre des roues utilisées via la formule suivante : PI x diamètre_roue(m) / (1/Vitesse_à_vide_du_moteur(tr/min)/60) = Vitesse_robot(m/s)
Pour le couple (torque) : Couple(Nm) = Force(N) x Rayon_roue(m), en considérant que la force vaut : masse_robot(kg) x 9.81(m/s²)
Pour le choix 1 : Tamiya Twin Motor GearBox
L'axe hexagonal n'est pas séparé en deux comme l'indique le commentaire : "We have a mini Tamiya Tank but as one motor drives both treads there's little point in turning it into a robot because it wouldn't be able to turn...This gearbox has the same width and profile as the original gearbox so it was easy to swap it in." Soit : ...mais comme un moteur entraîne les deux axes, il n'y a peu d'intérêt à le transformer en un robot car il ne serait pas en mesure de tourner...
Ensuite, le couple des moteurs est faible 36 g.cm mais avec une très grande vitesse 9710tr/min, ça dépend donc de ton application?
Pour le choix 2 : Gear Motor 9
C'est le parfait opposé du choix 1, couple très important (3.096 kg.cm) mais vitesse très faible 66tr/min. Intéressant si tu veux déplacer une "lourde charge" lentement
En ce qui concerne l'adhérence, je ne pense pas que ces roues soit excellentes si tu n'ajoutes pas un "pneu"
Si tu n'as pas moyen de fabriquer tes propres fixations moteurs "sans jeu" il vaut mieux investir dans la fixation déjà faite car si les moteurs bougent un peu c'est tout le robot qui en pâtira par la suite.
Pour le choix 3 :
Je n'ai pas trouvé les spécifications des moteurs.
Tu peux commander ces moteurs avec le circuit intégré SN754410
En espérant t'avoir éclairé et si tu as des questions reviens nous voir
Si tu n'en as pas reviens quand même nous montré ton travail
#64683 Base Roulante Mark I
Posté par
sur 13 juin 2015 - 01:22
dans
Robots roulants, chars à chenilles et autres machines sur roues
Dans ce post, je vous fait un petit retour sur les "difficultés" que j'ai rencontré, en espérant que ce sera utile pour quelqu'un qui souhaite effectuer une base roulante similaire.
En premier lieu, il faut s’assurer du bon fonctionnement des moteurs. Lors de leur utilisation avec les broches Pulse Width Modular (PWM) de l’Arduino, un bruit sonore apparait et augmente lorsque la valeur de PWM augmente (0 à 255).
Il est causé par la fréquence utilisée par la PWM. En se reportant à la documentation technique de l’Arduino Uno, il existe trois horloges contrôlant les 6 sorties PWM, la première de valeur 1kHz (par défaut) pour les pins 5 et 6, la seconde de 500Hz pour les pins 9 et 10 et la troisième de 500Hz pour les pins 3 et 11. Ces fréquences sont suffisantes pour faire clignoter des LED mais deviennent gênantes pour des systèmes résonants, tels que les moteurs. (Les valeurs par défaut sont obtenues par l’application d’un facteur de division 64).

Malheureusement pour changer la fréquence, il faut atteindre le registre et changer le facteur de division (appelé prescaler en anglais) ce qui est un peu plus compliqué que du code classique.
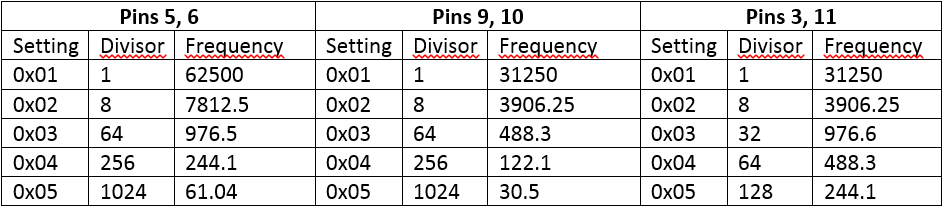
Il suffit d’insérer le code suivant dans le void Setup() du programme :

Le passage à la fréquence maximum fait totalement disparaitre le bruit.
Sources :
http://www.arduino.cc/en/Main/ArduinoBoardUno
http://www.arduino.cc/en/Tutorial/SecretsOfArduinoPWM
http://www.pobot.org/Modifier-la-frequence-d-un-PWM.html
http://arduino-info.wikispaces.com/Arduino-PWM-Frequency
http://usethearduino.blogspot.co.uk/
En second lieu, le robot réagit à son environnement grâce aux capteurs qu’il possède (obstacle, gaz, lumière...) si leur comportement n’est pas parfaitement connu, le robot ne pourra réagir efficacement.
Le principal capteur que j’ai utilisé est le SHARP GP2Y0A21YK0F : Portée 10-80cm. Lors des acquisitions, des mesures aléatoires venaient perturber le comportement du robot (détection d’obstacle inexistant). J’ai d’abord disposé un condensateur de 10µF entre l’alimentation (Vcc) et la masse (Grd) comme préconisé dans la documentation constructeur. Les perturbations persistaient, j’ai cherché à connaitre leur origine, qui est en fait dû au mode de fonctionnement du capteur lui-même. En effet, le capteur émet en continue un rayonnement IR mais n’effectue une mesure toutes les 38.3ms +/- 9.6ms, et il faut au maximum 5ms pour que celle-ci soit stabilisé. Par conséquent, on ne peut effectuer une mesure précise seulement toutes les 53ms.
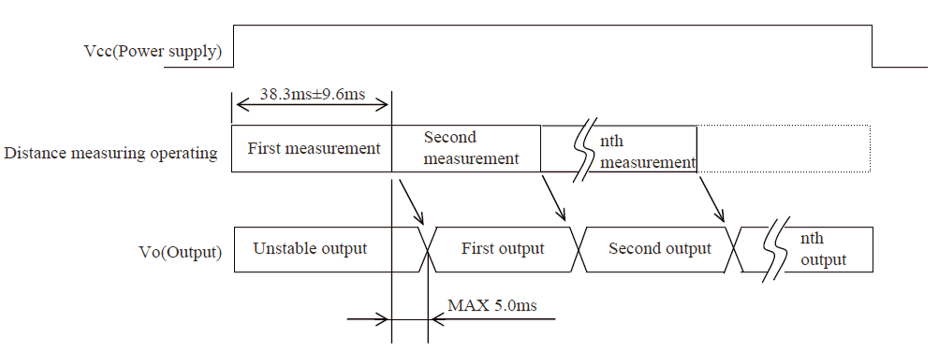
En ajoutant un delay de 53ms entre chaque mesure, j’ai pu réduire de façon significative ce problème, cependant de temps à autre, ce comportement revenait, provoquant l’arrêt du robot. Le moyen le plus simple, fut d’adapter l’algorithme de détection d’obstacle en moyennant des séries de mesures. Plus le nombre de points est élevé, plus le moyennage est efficace, cependant il prend plus temps et diminue la réactivité du robot.
La première adaptation fut d’acquérir plusieurs points (dans mon cas, 5) et d’effectuer moyennage brut sur celles-ci. C’est le moyen le plus simple consommant que très peu de temps (0.25s) mais le résultat peut être décevant. Une seconde possibilité, un peu plus complexe est d’acquérir les points et de les stocker dans un tableau par ordre croissant, on en extrait deux valeurs médianes que l’on peut moyenner, celui-ci est un peu plus long en termes de code mais reste aussi rapide que le premier pour un résultat meilleur.
Sources :
http://www.gotronic.fr/pj-51.pdf
http://www.pobot.org/Capteur-IR-Sharp-GP2D120.html
https://darylrobotpr...ent-les-eviter/
#64682 Présentation de Dens26
Posté par
sur 12 juin 2015 - 07:01
dans
Et si vous vous présentiez?
Bienvenue à toi !
#64392 probleme ide arduino
Posté par
sur 18 avril 2015 - 02:42
dans
Programmation
Hello,
SI ton problème n'est toujours pas résolu, les libraires que tu utilisais était celle de base ?
Sinon tu les avais bien placées dans le dossier .../Arduino/librairies et ils les détectaient lorsque tu les importais avec l'IDE ?
Tu as désinstaller en utilisant le dés-installateur de Windows ?
En alternative de l'IDE d'Arduino tu as MariaMole.
#64391 Radiocommander robot Arduino !
Posté par
sur 18 avril 2015 - 01:34
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut
Avec les XBee tu as deux options :
-La série classique (~25€) qui fait de 15m en intérieur à 100m sur terrain dégagé.
-La série Pro (qui coût un peu plus chère ~40€) mais permet d'avoir une portée plus intéressante de 100m de intérieur à 500m extérieur (j'ai pu lire que certains sont montés au kilomètre sur un terrain bien dégagé)
Après les séries ce décline en 1,2 et 5 suivant le type d'application. Pour ma part, je te conseille la série 1 qui est la plus simple à mettre en œuvre pour une communication point à point.
Tu as également le choix du type d'antenne (intégrée, filaire ou sortie UFL)
Le seul inconvénient de ces modules est la nécessité d'un shield arduino car le pas des pins n'est celui des standards courant.
Si tu as besoin de plus d'infos sur ces modules et le protocole ZigBee : http://faitmain.org/volume-2/xbee-arduino.html
PS : Je ne fais pas de pub pour ******* et il n'est pas forcement le moins chère 
#64389 presentation projet
Posté par
sur 18 avril 2015 - 01:13
dans
Et si vous vous présentiez?
Bienvenue à toi !
Pour ton projet tu devrais créer ton un topic plutôt dans la rubrique Vos projets ou réalisation robotiques du forum.
Je préfère te prévenir et non te décourager mais ce genre de projet demande un peu de sousous suivant ce que tu veux exactement et demande un minimum de temps surtout pour apprendre et comprendre les bases.
Dans un premier temps je te conseillerai de définir plus précisément ton projet en te posant le plus de questions (même les plus "simples") :
0) Quelle est ta motivation dans ce projet, est-ce juste un effet de mode ou une volonté concrète?
1) Combien de moteurs et "de roues" comportera-t-il?
2) Dans quel type d'environnement devra-t-il se déplacer ? (Sol lisse d'intérieur (lino, moquette...), terrain accidenté, jardin...)
3) Devra-t-il être capable de détecter lui-même des obstacle ? (Est-ce qu'il devra être réactif à son environnement? (allumage de LED si il fait nuit...))
4) Quelle durée d'autonomie souhaites-tu ?
5) Quelle portée de téléguidage souhaites-tu suivant le milieu (intérieur/extérieur) ?
6) Est-ce qu'il devra être évolutif pour effectuer d'autres tâches futures?
7) Jusqu'à combien es-tu prêt à dépenser (en € et en temps) pour ce projet?
...
Une fois toutes ces questions remplies, tu devrais avoir une image plus précise de ce que tu veux exactement et de l'étendue du projet.
#64388 Base Roulante Mark I
Posté par
sur 17 avril 2015 - 10:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'avais oublié de te répondre mais merci Mike. C'est vrai que maintenant je me rends compte, prendre autant de considérations pour un premier vrai robot n'est pas une vraiment une bonne chose.
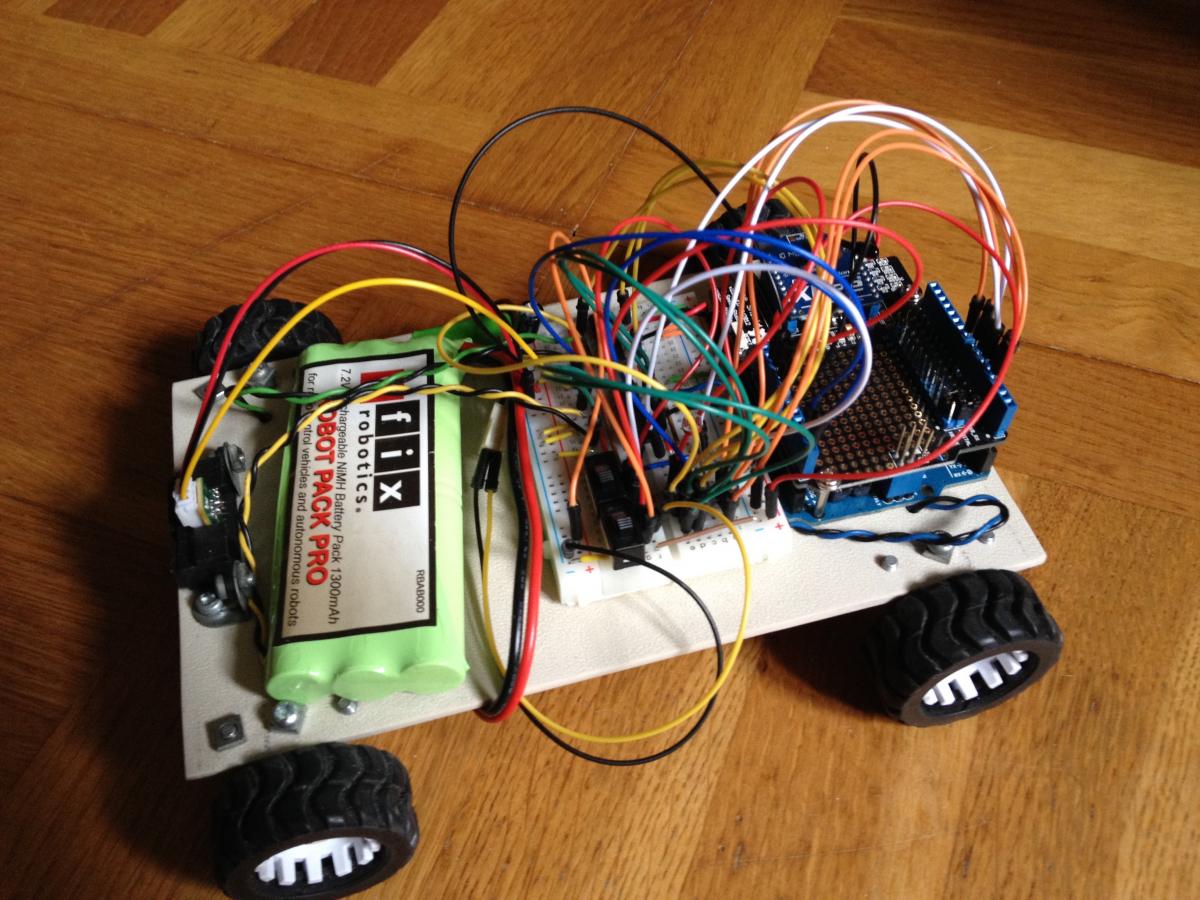
Après ces "quelques" mois pour vous présenter la version Mark 1.1 (j'ai pris un peu de retard par rapport à ce que je comptais faire mais l'important c'est le résultat comme on dit)
Le montage est un peu fouillis, je vais essayer de voir pour faire un circuit imprimé pour la prochaine version.
Il avance et esquive les obstacles (à peu près correctement) le principal défaut est le manque de capteurs de détection (IR/Ultrasons) qui fait qu'il se mange un pied de table de temps en temps ou lors de marche arrière.
La détection Jour/Nuit a été passé pour la prochaine version car je trouve que cette version est déjà un peu bordélique. (J'ai quand même implémenter la photorésistance et le code de détection dans cette version même si il n'est pas utilisé pour actionné quoique ce soit).
Par contre j'avais une question concernant la PWM, faut-il placer un condensateur en sortie de celle-ci histoire d'avoir un signal plus "droit" ou ça ne sert à rien vu la fréquence du signal (64500Hz)?
Image(s) jointe(s)
#62206 Base Roulante Mark I
Posté par
sur 27 octobre 2014 - 10:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui, c'est en effet c'est différent, le courant de pointe est le courant max que peux supporter le composant pendant un très faible instant.
Merci pour ton aide Transistance, la commande a été passé, il ne reste plus qu'à attendre la livraison =D
Je vous tiendrai au courant dès que j'aurai avancé.
#62087 Base Roulante Mark I
Posté par
sur 19 octobre 2014 - 07:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonsoir,
Je n'avais pas encore testé les moteurs mais c'est vrai que le couple n'est pas assez puissant pour vaincre le frottement et lancer le châssis "nu" malheureusement.
Je suis tombé sur ceci http://www.pololu.com/product/1598 qui me parait correcte.
Après quelques recherches sur les calculs de couples, réducteurs et vitesses, et si je ne suis pas trop bête :
Avec une roue de 9 cm de diamètre, une vitesse d'axe moteur de 120 tr/min. On a une vitesse de (3,14 * 0.09) / (1/(120/60)) = 0.56 m/s?
Son couple étant de 2.5kg.cm (Couple = Force*rayon) en théorie il peut porter une charge de F = 2500 / (9/2) = 555g ?
Par conséquent avec quatre, ça me donne une masse maximale de 2,2 kg ?
Remarques :
1. N'aurais-je pas intérêt à réduire le diamètre des roues? Ce qui permets d'augmenter la masse maximale supportée mais aussi le franchissement de pente d'inclinaison plus forte ?
2. Histoire de que je ne fasse pas de confusion, le site parle de 0,8A stall, cela correspond bien à 0,8A en pointe ?
Merci Nvaste pour ta remarque sur la pile 9V car je n'avais pas vraiment fais les calculs de capacité pour celle-ci, mais je tombe sur une autonomie d'environ une heure.
Par contre pas de pont diviseur car la carte à déjà un régulateur intégré (ce qui est bien pratique), et le pont dissipe tout par effet Joule, je sais que l'hiver vient mais je ne pense pas faire un robot radiateur mobile (quoique ça pourrait être sympa ^^)
Tu as raison Transistance de me reprendre, c'était un abus de langage de ma part.
Bonne soirée
#62048 Base Roulante Mark I
Posté par
sur 18 octobre 2014 - 04:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour
Je me lance enfin dans la réalisation d’un robot un peu plus sophistiqué et upgradable
Pour commencer, le robot sera en mesure de se déplacer de façon téléguidé sur des sols de types intérieurs (non chaotique) puis avec un mode autonome (évitement d’obstacles simple : murs, objets au sol…). Il présentera une autonomie d’alimentation de minimum une heure. Un mode nuit (allumage de diode lorsque la luminosité devient trop faible).
Il ne sera qu’une « base mobile » pour de futures améliorations auxquelles je réfléchis encore.
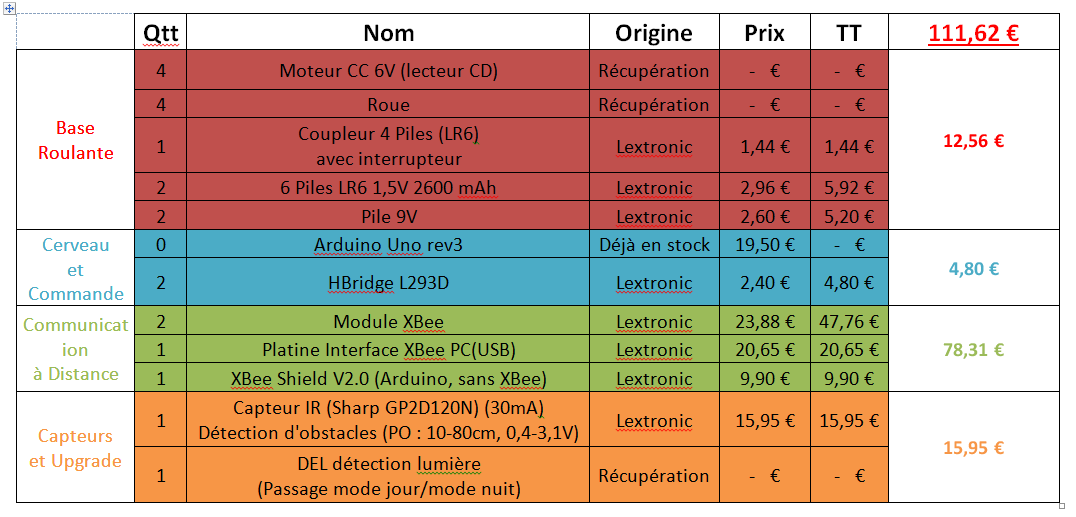
En ce qui concerne les pièces :
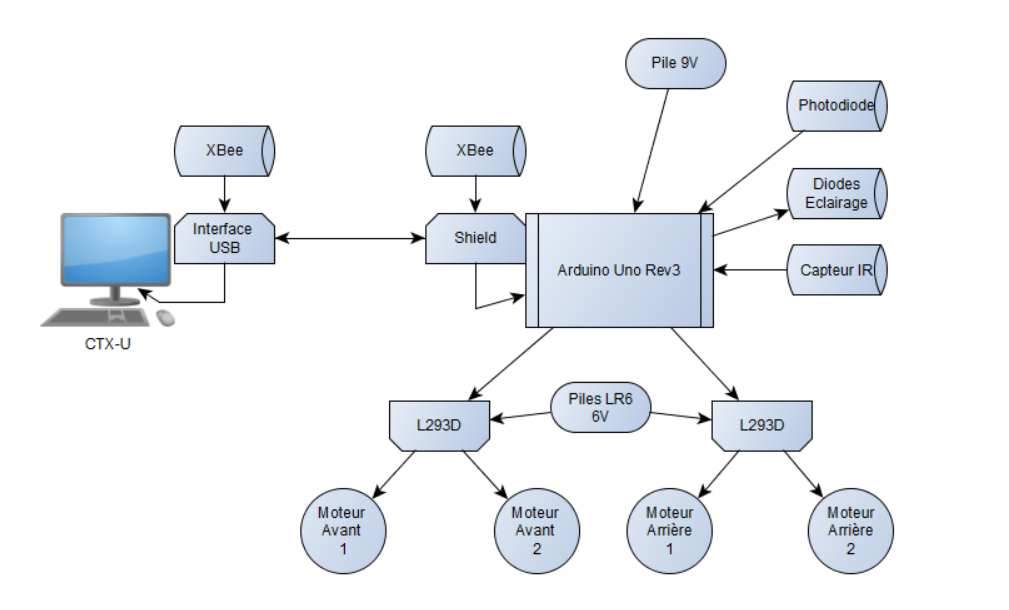
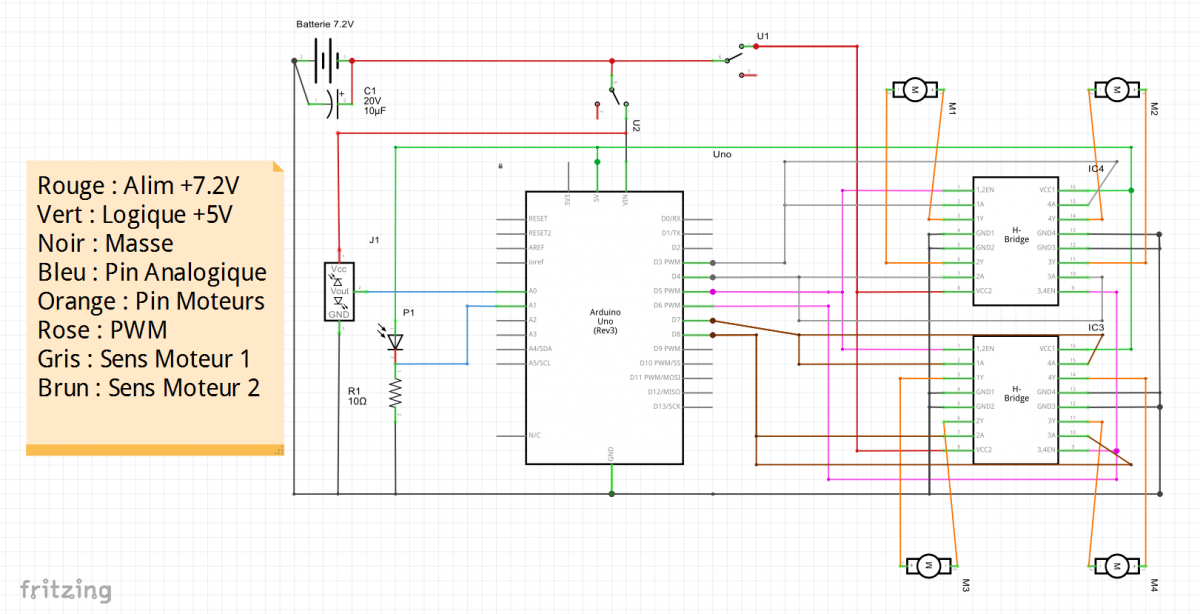
Toutes les informations et décisions seront collectées et prises via une carte Arduino Uno alimenté par une pile 9V avec un interrupteur branché sur la régulation de l’Arduino (Borne +5V et Ground).
Le contrôle des quatre moteurs CC 6V (récupérés sur vieux lecteur CD) en PWM sur la carte Uno sera fait par l’intermédiaire de deux puces H-Bridge L293D (intégrant deux ponts, max 600mA/canaux, avec déjà les diodes de roues libres (type Schotty)) et alimentées avec quatre piles LR6 (1,5V et 2600mAh).
La détection d’obstacle sera faite par un capteur IR : Sharp GP2D120N (portée théorique de 10 à 80 cm, sortie analogique 0,4—3,1V ; consommation moyenne de 30mA). La photodiode et les diodes d’éclairage sont des diodes récupérées à droite et à gauche (typiquement rouge/blanche soit 30mA/diodes).
La communication à distance sera faite au moyen de deux modules Bluetooth XBee (série1) (consommation 50mA/module), le premier relié à l’Arduino via un shield et la seconde reliée avec une carte d’interface USB pour l’ordinateur.
Le châssis sera en bois léger (épaisseur 2mm), les moteurs montés dessus avec les roues directement placées sur leurs axes.
J’ai déjà un peu réfléchi sur certains points mais toute remarque est la bienvenue :
- Quatre moteurs !? Un choix personnel ^^’

- Des roues montées sur les axes moteurs sans réducteurs !?
 Je veux une base qui roule de façon « correcte » et à coût réduit grâce à un peu de récup. Dès qu’il « tourne » bien, je verrai pour l’investissement de motoréducteur.
Je veux une base qui roule de façon « correcte » et à coût réduit grâce à un peu de récup. Dès qu’il « tourne » bien, je verrai pour l’investissement de motoréducteur.
La commande des pièces n’a pas été encore passé, elle sera fait fin de semaine prochaine je pense.
Je crois que j’ai dit tout ce à quoi j’ai réfléchi pour ce projet, j’attends avec impatience vos remarques