Merci.
C'est pas gagné pour les livraisons mais bon, il y a plus grave que çà en ce moment.
J'en profite pour encourager tout le monde à ne pas lâcher et à faire bien attention.
Bon courage à vous tous et à votre petite famille 
Il y a 96 élément(s) pour Dens26 (recherche limitée depuis 02-mai 13)
 Posté par
sur 11 avril 2020 - 08:55
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 11 avril 2020 - 08:55
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Merci.
C'est pas gagné pour les livraisons mais bon, il y a plus grave que çà en ce moment.
J'en profite pour encourager tout le monde à ne pas lâcher et à faire bien attention.
Bon courage à vous tous et à votre petite famille
Posté par
sur 07 avril 2020 - 03:46
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Petit up du projet
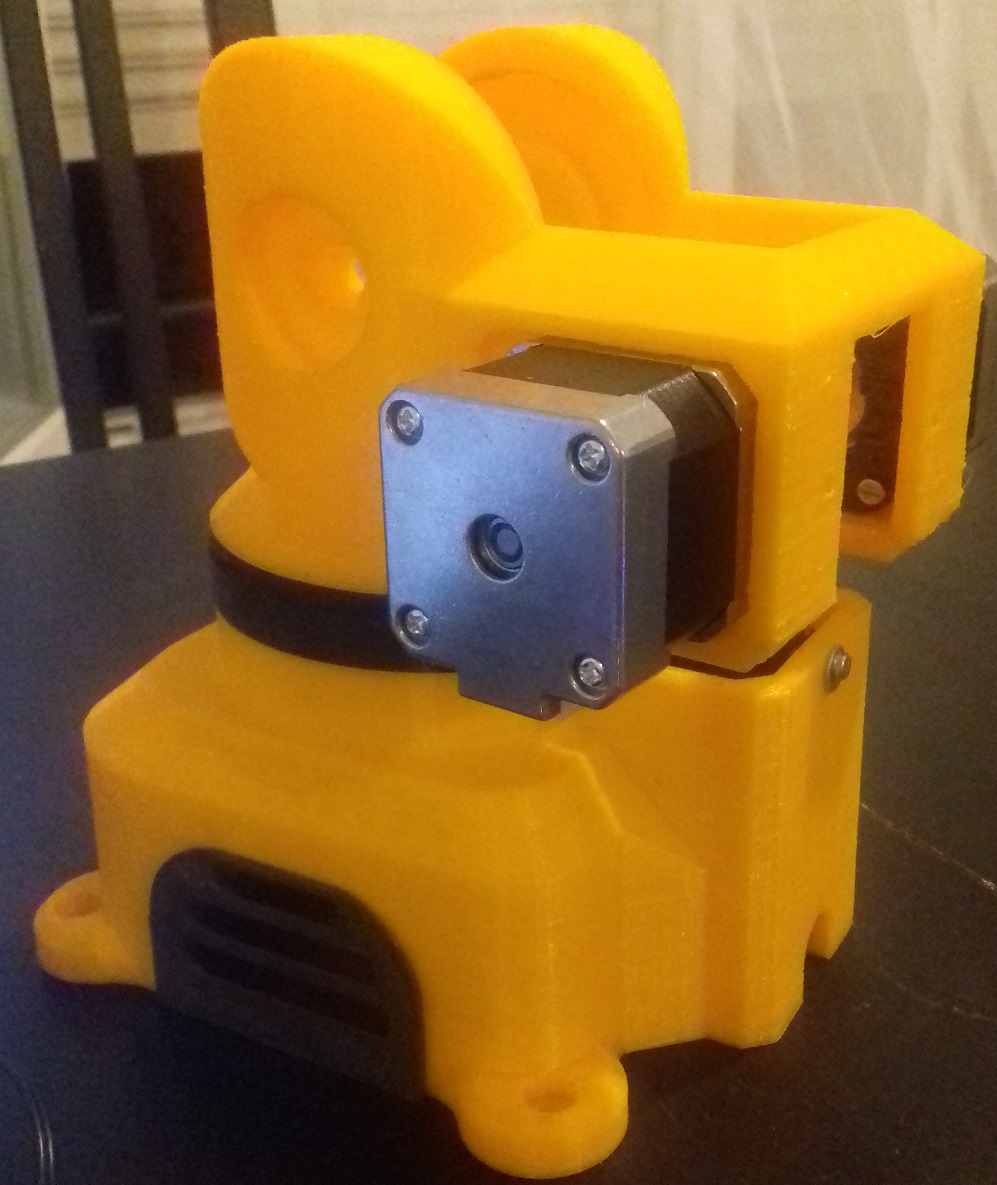
Je suis dans l'attente de certaines pièces manquante (roulement, courroie et une nouvelle carte RAMPS 1.6). Ouais j'ai cramé ma carte 
Du coup afin de finaliser l'assemblage, j'ai fait avec de "faux" roulement en "PLA" et sans courroie pour la base et le coude.
Voila une photo du Bras "presque" assemblé

Posté par
sur 26 mars 2020 - 07:04
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Sympa !
Je ne connais pas les servos Dynamixel, pourquoi les as-tu choisie?
Mon choix c'est porté sur ces servomoteurs pour plusieurs raisons
- J'en ai justement 4 à la maison qui traine dans un carton. ou plus précisément dans la tête et les mains d'un robot laissé à l'abandon (pour rappel)
- Ils ont un bon rapport couple/encombrement. parfait pour la "petite" taille du bras
Concernant le prix des servomoteurs, ils sont affichés à 22,90€. Je ne suis pas sur de trouver d'autres servomoteur de "petite taille" avec des performance similaire beaucoup moins chers
Posté par
sur 25 mars 2020 - 01:25
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Voila ce que j'appelle l'Avant bras et le poignet avec ses 4 servomoteurs Dynamixel XL320

Posté par
sur 24 mars 2020 - 03:20
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Salut les Makers!
Confinement oblige, j'ai un peu plus de temps pour me remettre sur certains projets et me revoilà donc sur celui-ci.
Je vais essayer de ne pas lâcher et de le terminer 
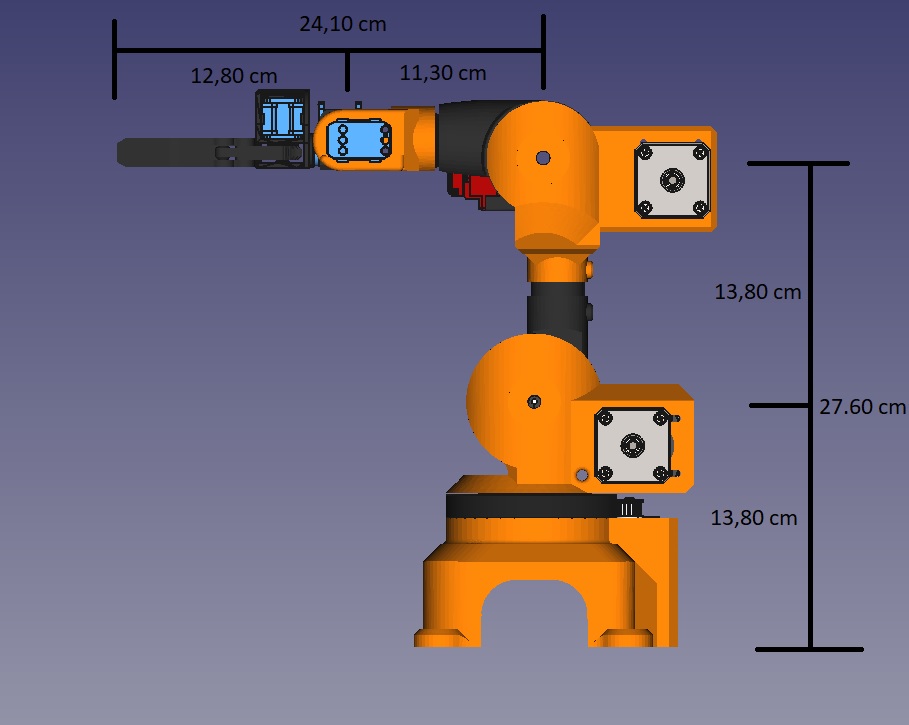
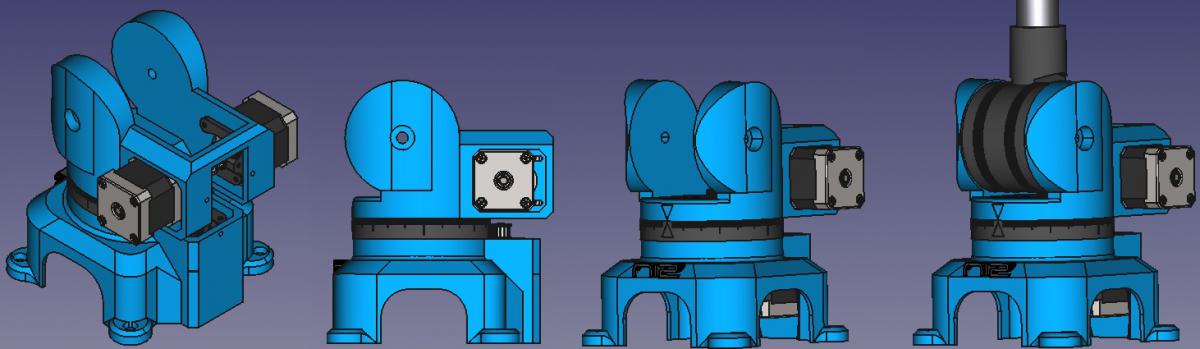
Je me suis remis sur le design des pièces qui sont normalement finies ( en théorie )
Au niveau des dimensions, j'ai un peu dépasser les 45cm de hauteur souhaité.
Il fera bras tendu du sol jusqu'à la pince 51,70 cm soit 6,70 cm de plus que prévu
Voila à quoi il va ressembler
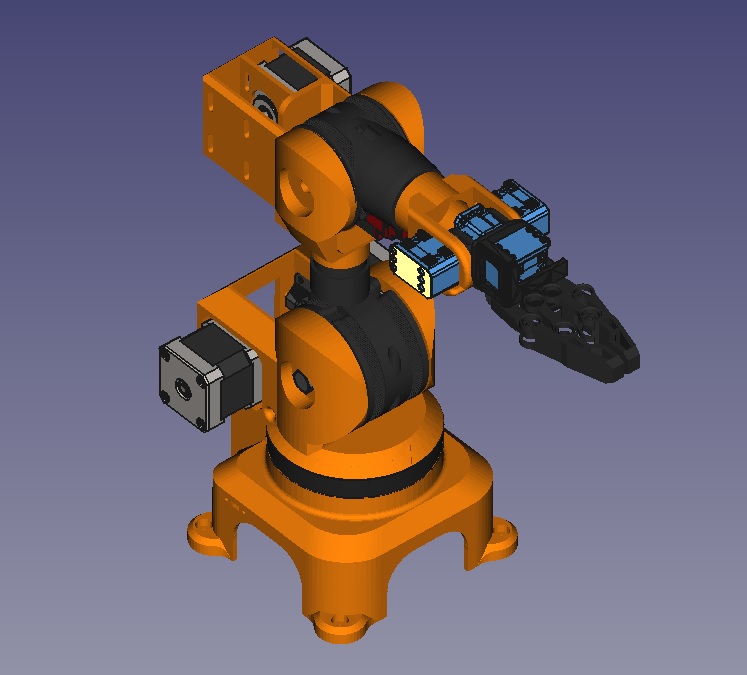
Il me reste à imprimer tout ça. Je posterai l'avancement 
Posté par
sur 19 juillet 2019 - 03:09
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Petit avancement concernant le robot.
Je viens de finir le coude qui maintiendra le bras final.
Il a pour le moment une hauteur de 31cm



Il me reste encore pas mal de travail (bras + pince)
Posté par
sur 07 juillet 2019 - 01:17
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je verrais ça plus tard.
Pour le moment je me concentre sur la conception du robot (c'est déjà beaucoup de travail  )
)
Posté par
sur 06 juillet 2019 - 11:28
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Non, en fait pour c'est bien l'arduino qui s'occupe des calculs.
Le logiciel est juste la pour donner un ordre d’Exécution avec une position donné.
Posté par
sur 05 juillet 2019 - 09:36
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 05 juillet 2019 - 02:11
dans
Bras robots, pinces, tourelles, et autres manipulateurs

Posté par
sur 01 juillet 2019 - 11:24
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Le projet avance doucement mais surement...
Le robot possède maintenant une base et ce que j’appelle "l'épaule".
Le tout tourne parfaitement, je ne remarque pas de faiblesse du au "roulement 3D". A voir avec des essais de précision


Posté par
sur 26 juin 2019 - 07:53
dans
Bras robots, pinces, tourelles, et autres manipulateurs
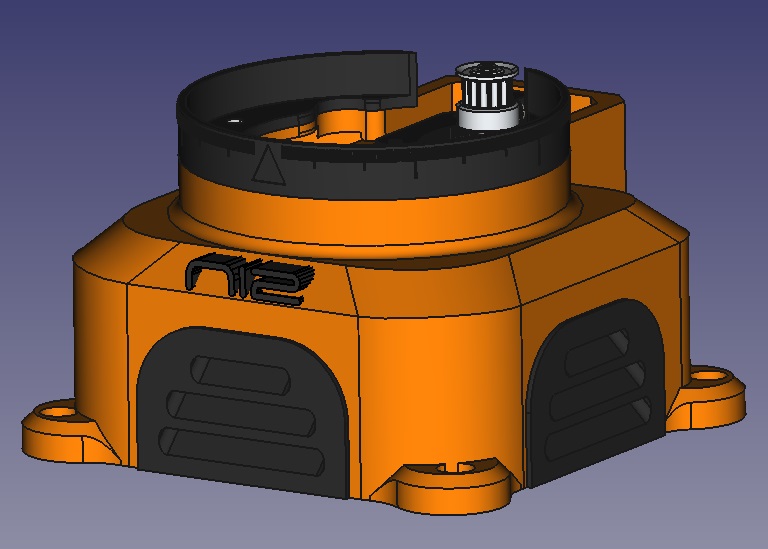
La base avec les caches d'aération

Posté par
sur 26 juin 2019 - 02:14
dans
Bras robots, pinces, tourelles, et autres manipulateurs
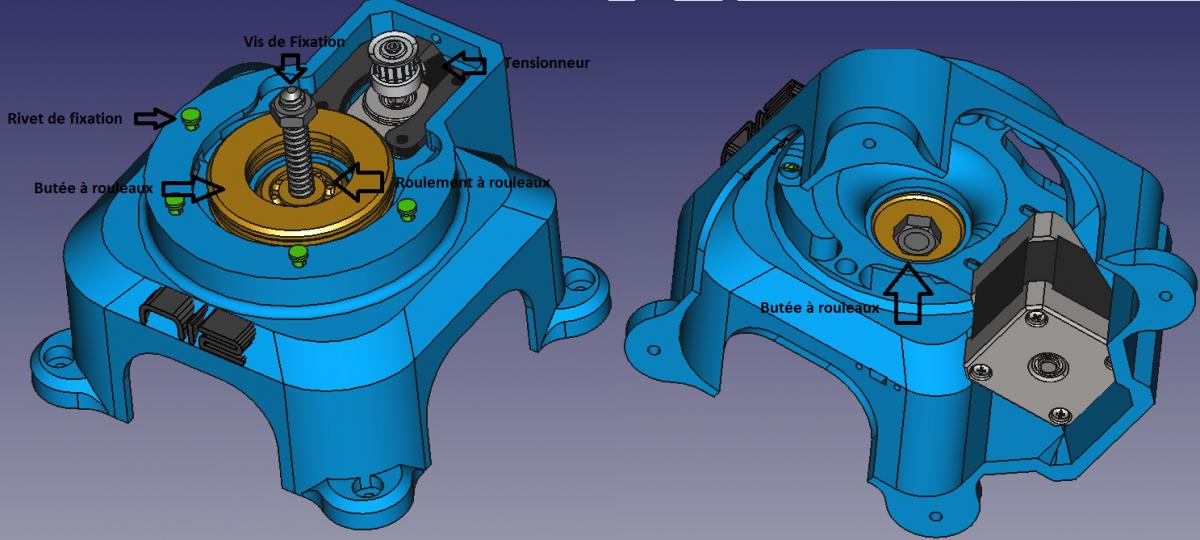
Petit apercu de l'avancement du projet :
J'ai imprimé :
La base avec le compas, la poulie, le roulement, les butée, une vis avec son écrou et les rivets.



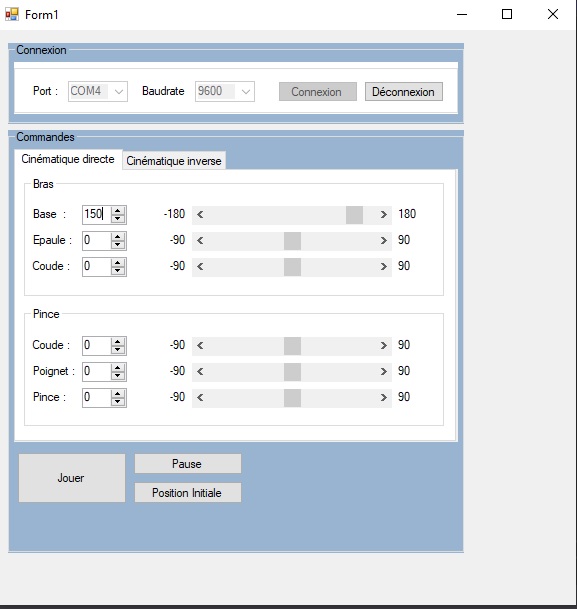
J'ai également crée un petit logiciel pour le contrôle du bras en C#
Les données sont envoyé via le port série à l'arduino
Posté par
sur 15 juin 2019 - 11:41
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 11 juin 2019 - 11:50
dans
Bras robots, pinces, tourelles, et autres manipulateurs
La Base presque terminée
Posté par
sur 09 juin 2019 - 01:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Sinon pendant que je modélise les finition de la base, j'ai imprimé la poulie 100 dents et un rivet de test


Posté par
sur 09 juin 2019 - 01:18
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je pense faire mes test avec les roulement 3D.
Après si ça n'est pas concluant je pourrais adapter avec de vrai roulement comme ceux-ci:
https://www.123roule...ement-51108.php
https://www.123roule...ent-608-2RS.php
Posté par
sur 06 juin 2019 - 11:35
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Salut,
Tu imprimes tes roulement ?
ça ne va pas aider tes petits moteurs ça ...
Merci pour ta remarque.
Je vais commencer avec ça. On verra par la suite si ça pose un problème de performance
Quel type de filament utilises-tu pour les roulements ? merci
Toutes les pièces que j'imprime sont en PLA
Posté par
sur 06 juin 2019 - 09:48
dans
Bras robots, pinces, tourelles, et autres manipulateurs
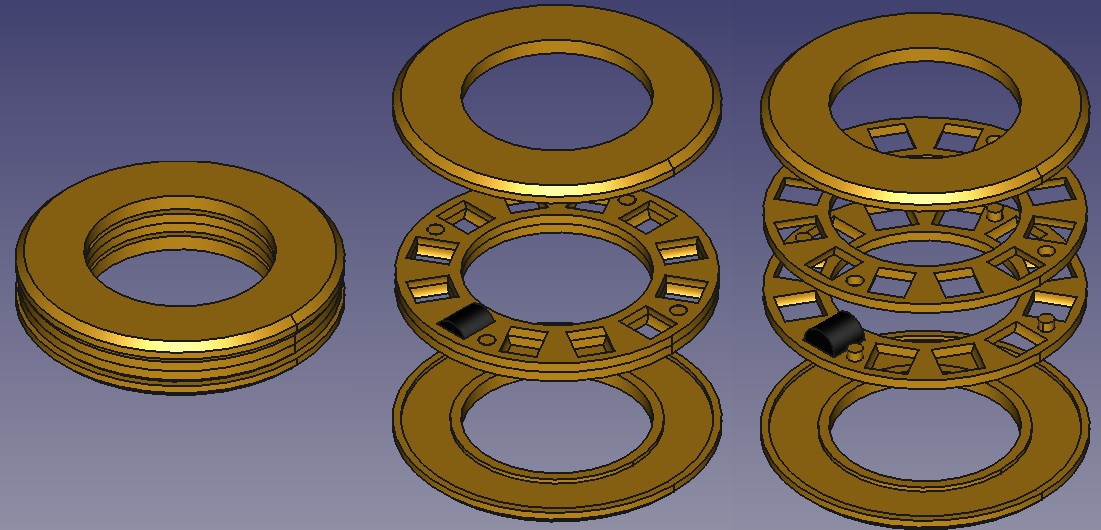
Voici le roulement à rouleaux 8x30x10 qui me servira pour les différents axe du robot
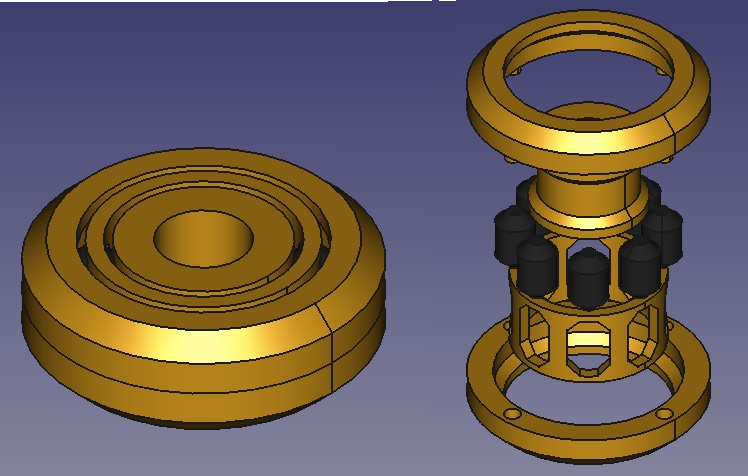

La butée à rouleaux 35x60x12

Posté par
sur 06 juin 2019 - 09:03
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Merci Mike118 pour l'info.
Je suis déjà tombé sur ce projet qui est très bien avancé. Je m'en suis effectivement inspiré et je remercie en passant Donovandu88 pour ses conseils en mp
Le problème est que j'aimerai faire fonctionner le robot avec des Nema17 et vu la taille et le poids du BCN3D Moveo, je ne suis pas sur que mes pauvres petit Nema puisse faire grands chose
Après plusieurs recherches, je n'ai pas trouvé ce qui me convenais donc je me suis dit "Allez !!! on ce met au boulot et on refait tout à sa sauce! "
Posté par
sur 06 juin 2019 - 01:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Je vous présente mon projet de bras robotisé 6 axes
La grande priorité du projet sera la maîtrise des coups tout en gardant une bonne fonctionnalité. J'aimerai qu'il ne dépasse pas les 200 euros (hors impressions)
Pour ce faire
Afin d’alléger le poids et le coût, le robot va être en grande partie en pièces imprimées 3D ( Support, visserie, roulements, etc …)
il sera actionné par des Moteurs Nema 17 contrôlé par une carte Arduino Mega couplé au shield Ramps 1,4 et les drivers A4988
J'ai fait le choix des moteur pas à pas Nema 17 pour leurs prix bon marché. On peut en trouver à moins de 40 euros les 5 avec un couple de 4kg/cm.
J'ai déjà commencé à modéliser la base du robot,"l'épaule",le bras et quelques roulements et fixations.
Pour la base, j'ai réalisé une vis avec ecrou, deux butée à rouleaux, un roulement à rouleaux des rivets et une poulie 100 dents
Pour le moment je suis encore en train de peaufiné la base pour ne pas avoir d'erreur de conception et ainsi éviter une impression pour rien
Posté par
sur 16 mai 2019 - 11:59
dans
Hack mod customisations et autres modifications
Posté par
sur 16 mai 2019 - 05:07
dans
Hack mod customisations et autres modifications
Salut
Bon boulot !
Sinon, il y avait également la possibilité d'utiliser des "servos treuil" qui font 360° (à ne pas confondre avec les servos à rotation continue).
Je sais qu'il existe des servomoteur 360° mais j'ai déjà celui la à la maison.
Et en découpant l'axe de butée ? Je sais qu'il est monté a froid sur l'engrenage sinon en cassant les fond de butée en plastique sur le capot ?
Ça m'intéresse comme je possède 7 servo de ce type. Après je trouve ça regrettable de devoir diviser par 2 le couple mais bon ingénieux quand même ton principe. T'a tout imprimer en 3d engrenage compris ?
J'ai vu qu'il y avait des solutions en démontant et en coupant l'axe de butée.
Le truc c'est que je voulais garder le servomoteur intact pour pouvoir le ré-utiliser si besoin
Le tout à été imprimer en 3d engrenage compris, je posterai les fichier .stl si cela intéresse quelqu'un
Concernant la perte de couple je vais faire un test pour voir si j'ai bien une diminution de moitié
Posté par
sur 16 mai 2019 - 12:38
dans
Hack mod customisations et autres modifications
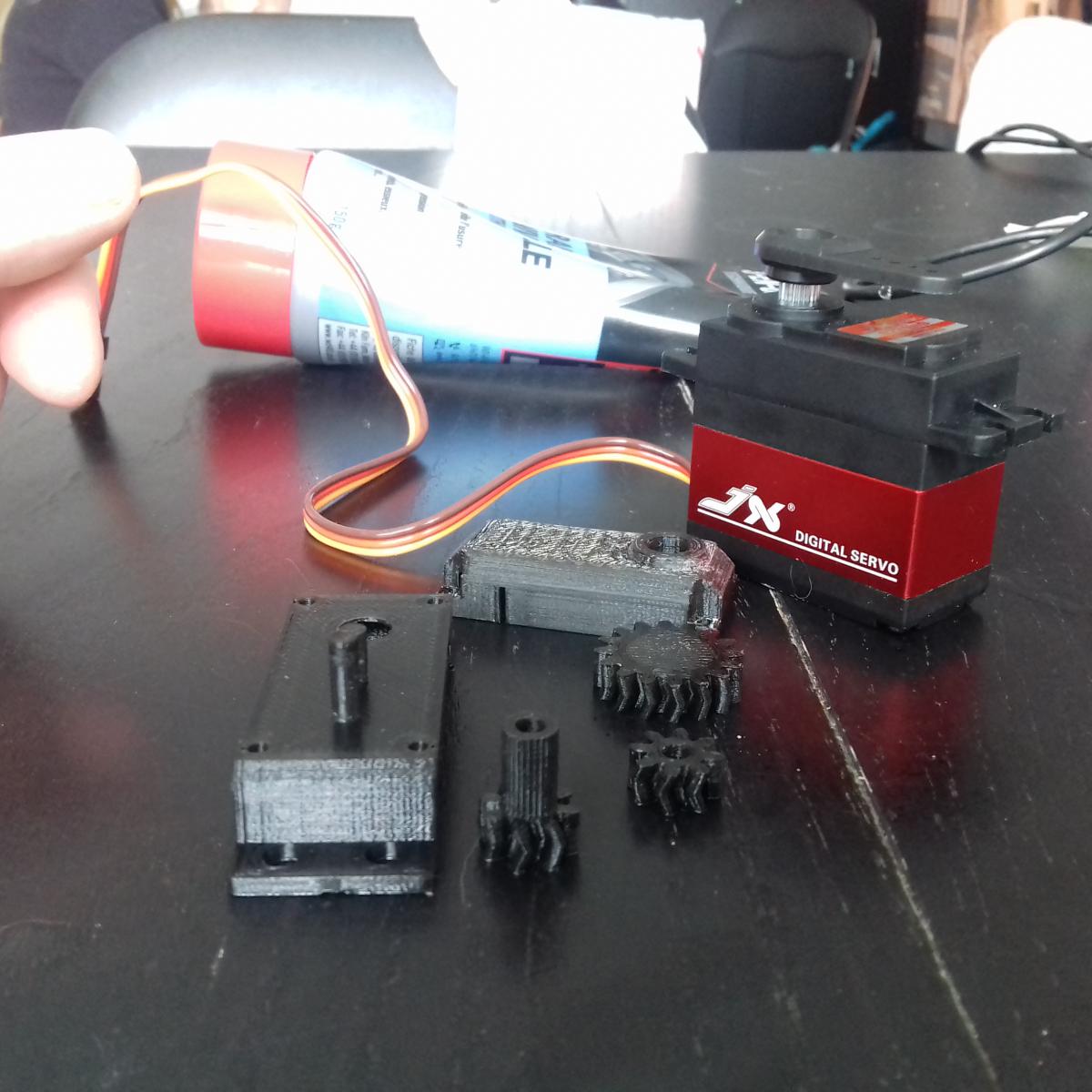
Bonjour,
Je vous présente ici ma petite modification du servomoteur jx pdi 6621mg
En effet, pour des besoins sur un projet de bras robotisé, j'ai besoin de modifier ce servomoteur pour qu'il puisse faire un tour complet.
Après quelques recherche, j'ai trouvé des solutions pour le mettre en rotation continue mais c'est pas exactement ce que je souhaite.
Du coup je me suis tournée vers l'ajout d'un train d'engrenage.
De ce fait pas besoin de hacker le servomoteur en lui-même. Il y a cependant une perte de couple de moitié mais dans mon cas cela n'est pas gênant. 10kg/cm m'est largement suffisant.
Voila ce que cela donne :

Posté par
sur 13 novembre 2018 - 01:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Petit up du projet
J'ai bien reçu la carte PIXL qui doit alimenter et contrôler les servomoteurs AX-12 et XL-320
La fiche technique de la carte PIXL ici
- La carte PIXL sera alimentée en 12v se qui permettra d'alimenter les servomoteur AX-12 directement via ses mofset
- La carte PIXL permet d'alimenter directement la carte Raspberry pi se qui est bien pratique
- Les servomoteurs XL-320 seront alimenté du coup par le 5v de la Raspberry pi. La donnée sera envoyé par le pin data d'un mofset
Il me faut donc connecter sur le Raspberry pi :
- La carte PIXL
- Le gyro MPU 6050
- Les 3 capteurs de distance HR-SR04
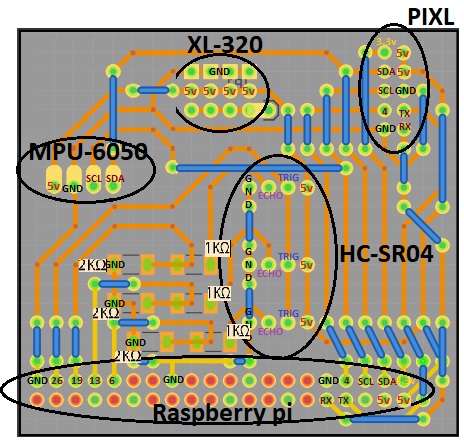
Je me suis donc lancé dans la conception d'un shield spécialement étudié pour le projet
Le but est de pouvoir connecter tout cela sur le shield en prenant le moins de place possible
La carte PIXL est prévue pour s'enficher directement sur la Raspberry pi se qui m'embête un peu car je ne peux pas enficher mon shield
J'ai donc déplacé la carte PIXL pour qu'elle s'enfiche sur mon shield qui lui s'enfiche sur la Raspberry pi
Voila ce que cela donne :
Il me reste plus qu'à attendre ma plaque epoxy cuivrée 2 face pour pouvoir tester ce shield
Pour la conception du schéma, je me suis aidé de ses deux tutos






