Mon équipe a utilisé ROS pour notre projet de fin d'études (un robot guide d'aveugle). C'était le cœur du système de navigation du robot. Il suffit d'écrire l'interface entre les capteurs, les moteurs et ROS et roule ma poule : tu as un robot capable de trouver son chemin tout seul. En pratique le plus embêtant dans notre utilisation de ROS c'était que nous n'avions pas les pré-requis (principalement pour des raisons de coût, 300 € de budget c'est peu) : notamment : nous n'avions pas de LIDAR pour exploiter les fonctions de SLAM, les roues codeuses étaient de piètre qualité et le nous utilisions un châssis de voiture RC, assez difficile à contrôler. Ça et la gestion des ressources informatiques : la Beaglebone Black que nous utilisions était régulièrement à court de ressources à allouer à nos différentes fonctions ce qui occasionnait des bugs (surtout dans le système audio pour communiquer avec l’extérieur).
Contenu de Bacab
Il y a 108 élément(s) pour Bacab (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#98893 Au bistrot du coin ...
 Posté par
sur 08 septembre 2018 - 10:43
dans
Général
Posté par
sur 08 septembre 2018 - 10:43
dans
Général
#104515 Au bistrot du coin ...
Posté par
sur 23 juillet 2019 - 12:09
dans
Général
J'en connais pas mais quand tu seras là bas hésite pas à leur parler de robot-maker! =)
J'essaye de discuter avec des responsables de fablab pour voir si on peut faire des partenariats ou autre =)vu que j'espère monter un lab aussi ...
Ok, je te tiens au jus...
#104504 Au bistrot du coin ...
Posté par
sur 22 juillet 2019 - 12:19
dans
Général
Hello !
J'ai un peu de grosse méca (perçage et découpage) à faire sur mon sous-marin et je vais devoir me rendre dans un fablab pour le faire. A 40 min. de transport y'a l'Electrolab à Nanterre où j'ai déjà mis les pieds une fois y'a 5 ans. Est-ce qu'il y a des membres de ce fablab parmi nous ?
#97960 Brainstorming projets robotiques originaux
Posté par
sur 28 juillet 2018 - 11:55
dans
Lego
Un robot capable d'aller me chercher un livre dans ma bibliothèque sans que j'ai à soulever mon auguste derrière.
Un bras robotique ou un UAV d'intérieur avec une caméra pour identifier le livre et me l’apporter pourrait faire l'affaire. Le principal souci du drone c'est la charge utile : certains livres dépassent allégrement les 3 kg.
#111023 Télécomande pour robots d'exploration -
Posté par
sur 12 septembre 2020 - 12:45
dans
Electronique
Je m'avance peut être, mais je pense que le plus gros problème avec ce genre de carte externe risque d'être les drivers. J'ai par le passé eu de mauvaises expériences avec les OS libres et les cartes périphériques (drivers inexistants, ou à l'état de beta qui fonctionne mal...). Ceci étant dit, vu le prix assez bas, tu ne risques pas grand chose à tester. D’autant qu'il est difficile de se renseigner autrement vu que la page du vendeur ne fait pas état d'une quelconque marque ou modèle précis.
#98200 Little Yellow Submarine (L.Y.S.)
Posté par
sur 05 août 2018 - 03:18
dans
Robots sous-marins bateaux et autres systèmes aquatique
Je suis plutôt du genre prudent. En théorie le moteur qui équipe mon sous-marin peux fournir un couple de 0,5 N/m à 3100 RPM et les hélices que j'ai conçues sont faites pour ces caractéristiques.
Comme le moteur à une vitesse maximum de 11000 RPM ce serait mieux d'avoir un réducteur au lieu de faire tourner le moteur au ralenti. Dans un premier temps je ferai sans mais comme j'ai du temps en ce moment j'ai conçu un réducteur étanche 3:1 que je monterais peut être.
#98079 Little Yellow Submarine (L.Y.S.)
Posté par
sur 02 août 2018 - 12:00
dans
Robots sous-marins bateaux et autres systèmes aquatique
Alors je viens de tester l'eau et le PLA...
J'ai fait une petite boite, et comme je l'ai poncée avec un solvant, j'ai voulu la rincer à l'eau, et comme le solvant m'a fait quelques marques blanches
je me suis dit "de l'eau chaude et c'est bon"...
ERREUR !
Ma boite ronde qui faisait 60mm de diamètre extérieur et 50mm de diamètre intérieur a perdu plus de 2mm !
Donc éviter l'eau chaude (70° environ)
Ça va le réchauffement climatique n'a pas encore atteint ces températures  !
!
Dans le pire des cas toutes les pièces que j'ai imprimées devront être refaite dans un matériaux plus résistant. Je serai alors dans l'obligation d'avoir recours à un service d'impression car je me refuse à imprimer autre chose que du PLA dans mon 2 pièces mal ventilé. Ce sera pas la fin du monde.
#98209 Little Yellow Submarine (L.Y.S.)
Posté par
sur 05 août 2018 - 08:08
dans
Robots sous-marins bateaux et autres systèmes aquatique
#98221 Little Yellow Submarine (L.Y.S.)
Posté par
sur 06 août 2018 - 10:08
dans
Robots sous-marins bateaux et autres systèmes aquatique
plutôt que de fabriquer un réducteur, le mieux serait de faire plusieurs hélices et de voir celle qui marche le mieux tout en consommant le moins d'intensité
Oui c'est un peu ce que je disais dans mon post sur les hélices (ben alors on ne lit pas toute ma prose !  )
)
J'en ai conçu une (non illustrée) pour la vitesse de 11000 RPM mais elle n'est pas très efficace (30 N de poussée à 11000 RPM en statique contre 60 N à 3100 RPM pour les deux hélices que j'ai montrées). La différence provient de la taille de l'hélice : à 11000 RPM il est conseillé de ne pas dépasser 4,5 cm de diamètre, contre 9 cm à 3100 RPM.
Pour les curieux j'utilise le code Matlab d'Openprop pour concevoir les hélices. C'est bien, surtout, pour un ignorant complet comme moi dans le domaine de l'hydrodynamique. La méthode de simulation qu'il utilise surestime un peu la poussée de l'hélice et sous-estime le couple généré par frottement donc je garde une marge sur la puissance totale (~10 %).
Tu as par ailleurs parfaitement raison au sujet du réducteur. C'est la pire solution qui soit... et en même temps je déteste rester passif devant un problème et la seule solution que je pouvais concevoir en étant loin de chez moi c'est celle-ci .
Dans l'ordre des choses je vais :
- imprimer les différentes hélices et mesurer la poussée statique de chacune à la puissance maximale du moteur, je comparerai ensuite l'efficacité de chacune;
- en cas de résultats décevant ou insuffisant je monterais des moteurs plus puissant (un ami m'a conseillé des brushless de même puissance mais qui tournent deux fois moins vite);
- recourir au réducteur.
#104531 Little Yellow Submarine (L.Y.S.)
Posté par
sur 24 juillet 2019 - 06:25
dans
Robots sous-marins bateaux et autres systèmes aquatique
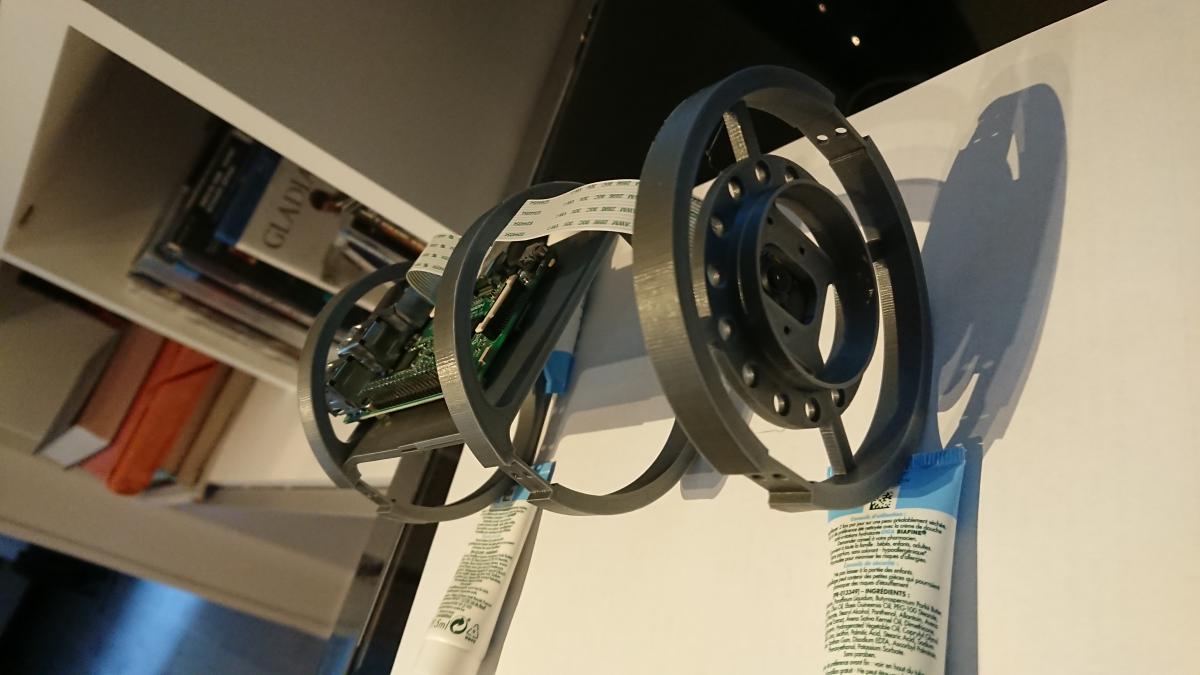
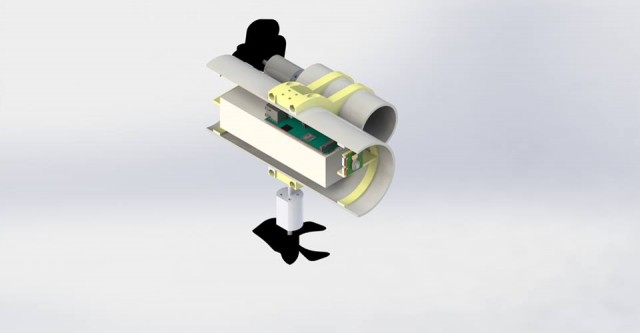
En ce moment je bosse sur les aménagements intérieur pour caser la Raspberry, l'éclairage et la caméra. Voici une "évocation du résultat final :
#104548 Little Yellow Submarine (L.Y.S.)
Posté par
sur 27 juillet 2019 - 06:36
dans
Robots sous-marins bateaux et autres systèmes aquatique
Depuis le temps que youtube me suggère (on se demande pourquoi...) cette vidéo il serait temps que je la regarde. Pour la transmission par aimant j'avais commencé à regarder dans cette direction fut un temps mais j'avais pas trouvé grand chose. Tu évoquais ça comme ça ou tu as quelque chose de précis en tête ?
#98057 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 août 2018 - 02:03
dans
Robots sous-marins bateaux et autres systèmes aquatique
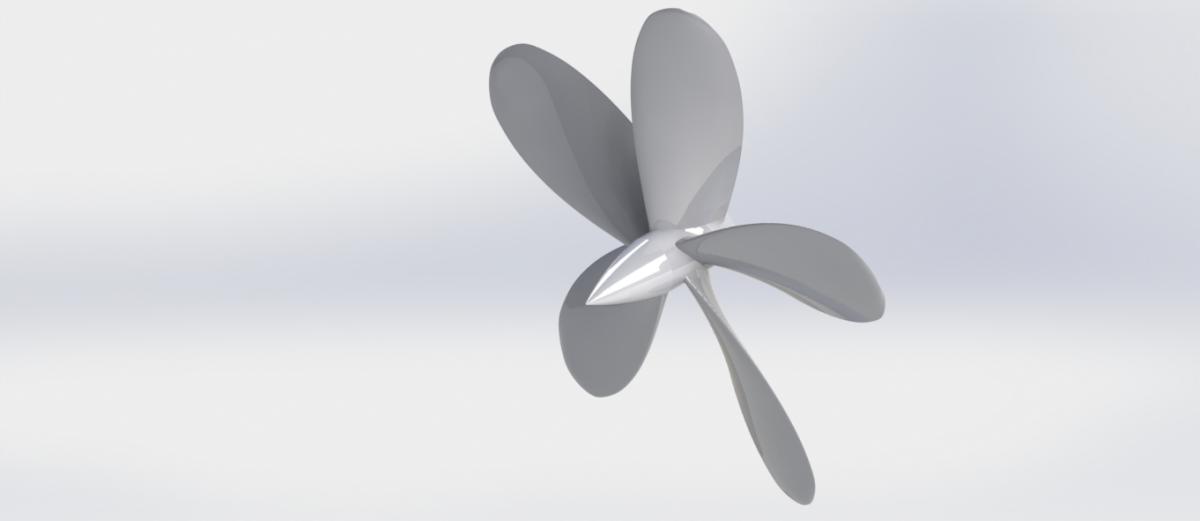
Comme beaucoup je suis en congés loin de chez moi au mois d'aout. Mais cela ne m’empêche pas de travailler un peu sur le sous-marin ! En ce moment je réalise avec Solidworks différent types d'hélices pour remplacer celles que j'ai achetées dans le commerce et qui sont difficiles à trouver.
Voici l'une des hélices que je testerai bientôt :
Hélice plutôt adapté aux grandes vitesses, je n'en attends pas grand chose :
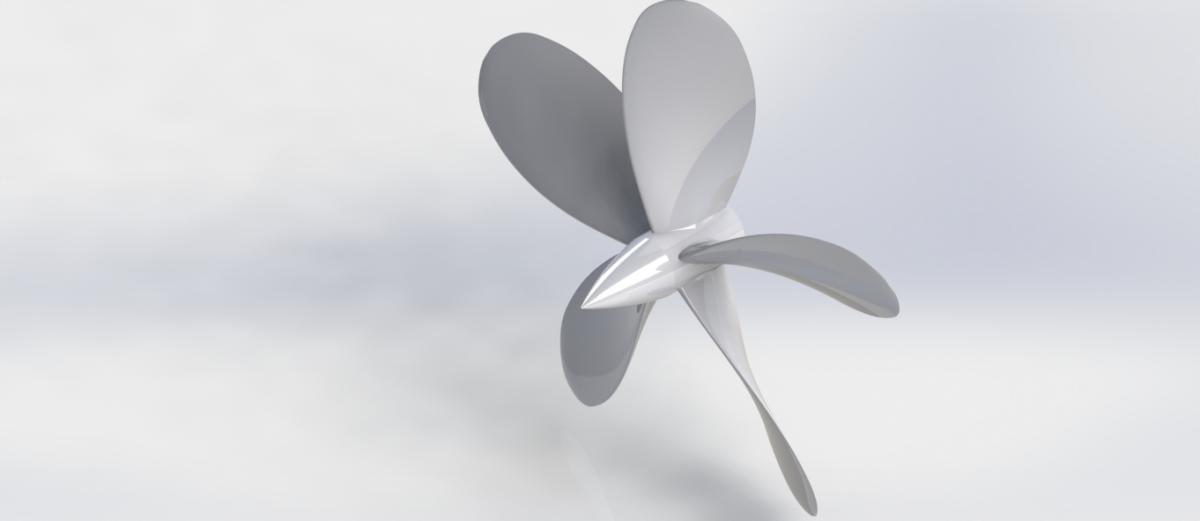
Hélice plutôt adaptée aux petites vitesses, je pense que les tests la donneront gagnantes :
#96784 Little Yellow Submarine (L.Y.S.)
Posté par
sur 26 juin 2018 - 07:25
dans
Robots sous-marins bateaux et autres systèmes aquatique
Merci ! Je me suis attaché pendant le développement à imaginer comment j'allais assembler le sous-marin, de manière à ce qu'un parfait débutant, et non bricoleur qui plus est (comme moi quoi), puisse sans effort le construire. Je suis plutôt satisfait du résultat même si certains choix ne sont finalement pas si éclairé que ça comme, par exemple, le couple hélice/moteur pas si optimal. Mais comme ça remettait profondément en cause le design j'ai décidé de continuer avec. Les fixations des moteurs dans les tuyaux sont également compliquée et vont me demander pas mal de mise au point vu que ma solution initiale ne me satisfait pas.
Et pour répondre à ta question : le premier objectif du projet était éducatif : je voulais apprendre à modéliser en 3D et à réaliser mes propres pièces pour mon imprimante 3D. Comme je n'arrive pas à apprendre sans un support concret je me suis lancé dans un sous-marin. Le projet a pris de l'ampleur par la suite. Maintenant je vise l'exploration à quelques mètres sous la surface (moins de 20 m) des fonds marins méditerranéens (j'ai en effet vu une superbe exposition de photos dans un musée de la région et j'aimerais bien faire pareil !).
#96766 Little Yellow Submarine (L.Y.S.)
Posté par
sur 26 juin 2018 - 03:13
dans
Robots sous-marins bateaux et autres systèmes aquatique
#96740 Little Yellow Submarine (L.Y.S.)
Posté par
sur 26 juin 2018 - 07:20
dans
Robots sous-marins bateaux et autres systèmes aquatique
https://www.youtube....r/submarineboat
#96914 Little Yellow Submarine (L.Y.S.)
Posté par
sur 30 juin 2018 - 09:33
dans
Robots sous-marins bateaux et autres systèmes aquatique
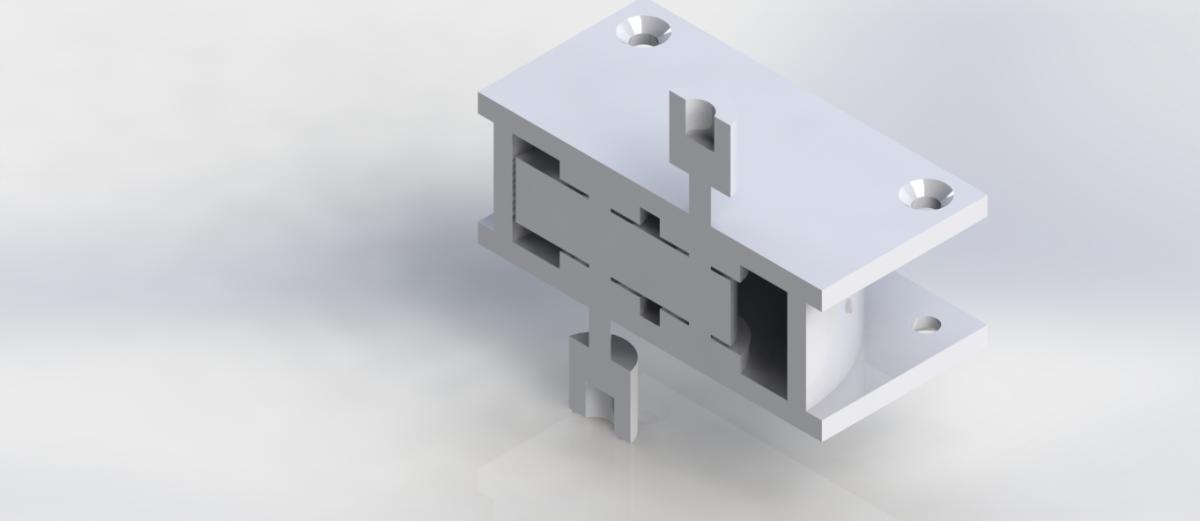
Quelques nouvelles car ce week-end je n'ai pas chômé (enfin c'est surtout mon imprimante qui a travaillé !). Comme je le disais plus tôt ici je n'étais pas satisfait de la fixation des moteurs. Après plusieurs design et quelques heures de réflexions (ajouté à quelques heures d'impressions et quelques jours/semaines d'attentes pour recevoir les pièces) j'ai finalement assemblé aujourd'hui mes nouvelles fixations pour les propulseurs et tout s'assemble très bien !
Le problème était que la pièce était tenue par deux vis dans le tuyaux et que, même serrées à fond, elles laissaient une liberté de rotation au moteur en lacet qui permettait à l'hélice de venir taper contre les bords de la tuyère. Inacceptable donc.
J'ai donc ajouté deux trous dans l'alignement de ceux existants pour contrer cela ! Las cela n'a pas marché (la pièce est visible ci-dessous).

En effet le plastique était trop souple et l'hélice pouvait encore venir taper contre le bord de la tuyère.
Je me suis donc résigné à concevoir une cage qui viendrait fixer le moteur à sa base et le long de son axe et qui remplirait tout le diamètre du tuyau pour éviter tout jeu (accessoirement, ayant déjà percé les tuyaux, cette nouvelle pièce devait utiliser les mêmes fixations).
Et voila le résultat :

Le roulement à billes est doté de deux joints étanches donc j'espère que cela ira.
#96918 Little Yellow Submarine (L.Y.S.)
Posté par
sur 30 juin 2018 - 10:34
dans
Robots sous-marins bateaux et autres systèmes aquatique
Merci pour vos compliments.
J'ignorais que Robot Maker héberge les photos. Par habitude d'autres forums je continuais d'utiliser l’hébergeur chez lequel j'ai un compte. J'y penserais pour les prochaines fois.
#97168 Little Yellow Submarine (L.Y.S.)
Posté par
sur 07 juillet 2018 - 10:55
dans
Robots sous-marins bateaux et autres systèmes aquatique
J'ai sorti de l'eau aujourd'hui la pièce que j'avais immergée et elle n'est pas déformé. Je vais donc poursuivre la construction avec ma bobine de fil.
#96936 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 juillet 2018 - 10:37
dans
Robots sous-marins bateaux et autres systèmes aquatique
A la lumière de ces nouveaux éléments je vais faire quelques expériences :

#96933 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 juillet 2018 - 09:03
dans
Robots sous-marins bateaux et autres systèmes aquatique
J'utilise du PLA. Je me doutais bien que ça ne serait pas étanche donc je n'utilise pas les pièces imprimées pour l'étanchéité. En revanche je n'ai pas prévu que les pièces gonflent... Ça me gonfle.
Est ce quelqu'un sait si il est possible de traiter les pièces pour éviter qu'elles ne gonflent ?
#96570 Little Yellow Submarine (L.Y.S.)
Posté par
sur 20 juin 2018 - 09:37
dans
Robots sous-marins bateaux et autres systèmes aquatique
Bonjour à tous,
Comme je le disais dans un autre sujet, cela fait deux ans que je travaille à la réalisation d'un sous-marin filoguidé et j'aimerais vous présenter mon projet. Celui-ci se nomme L.Y.S. pour Little Yellow Submarine (comme dans le titre du sujet, c'est fou ça !) à la fois pour la référence (facile) à une chanson bien connue mais aussi parce que j'aimais bien l'acronyme du projet.
Le but de ce sous-marin est de permettre de filmer et d'écouter en temps réel ce qui se passe à quelques mètres sous la surface. Accessoirement j'espère pouvoir expérimenter avec l'hydrophone que j'ai fabriqué.
Voici les règles que je me suis fixé pour mon projet :
- le coût final des pièces détachées utilisés pour le sous-marin ne doit pas dépasser les 300 €;
- le sous-marin doit emporter une caméra frontale et envoyer la vidéo en temps réel à l'opérateur;
- le sous-marin doit remonter à la surface seul en cas de panne totale de l’électronique de bord.
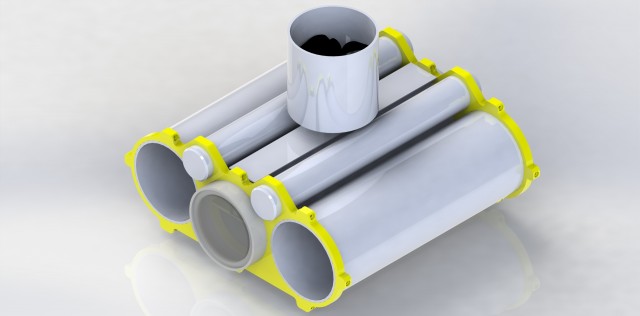
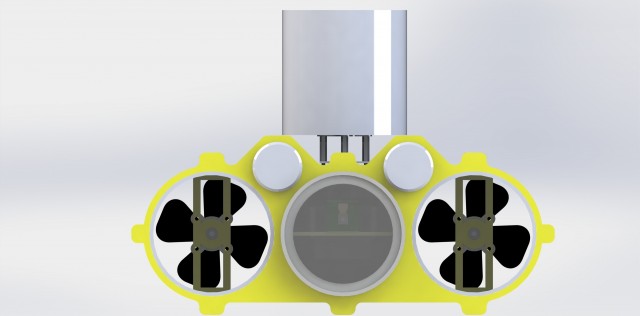
Après des heures de modélisation j'ai finalisé la conception et les plans : voici quelques rendus des différentes solutions qui ont traversé mon esprit :
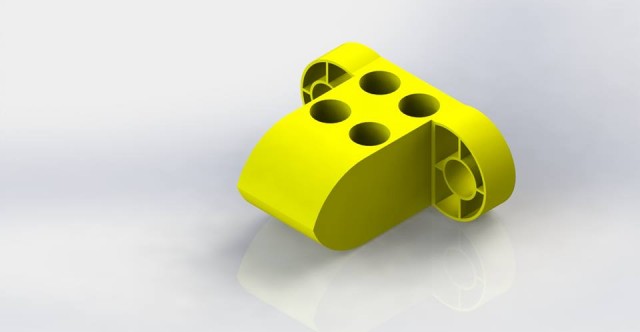
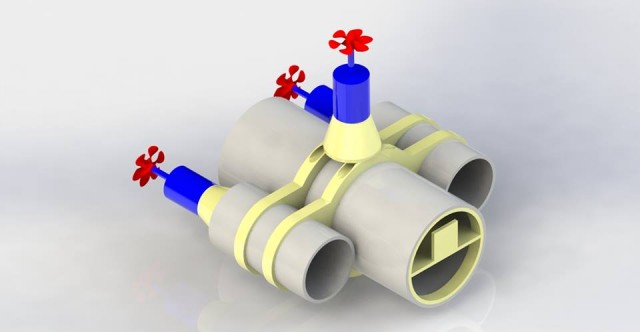
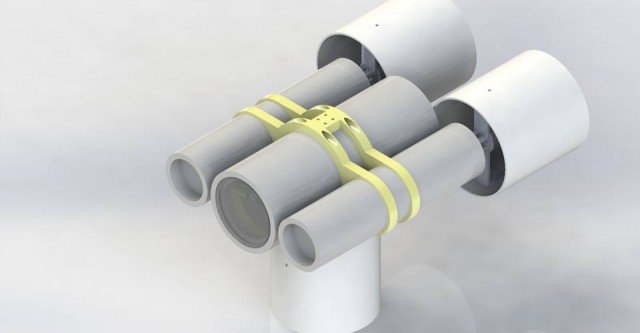
Et voici la modélisation finale :
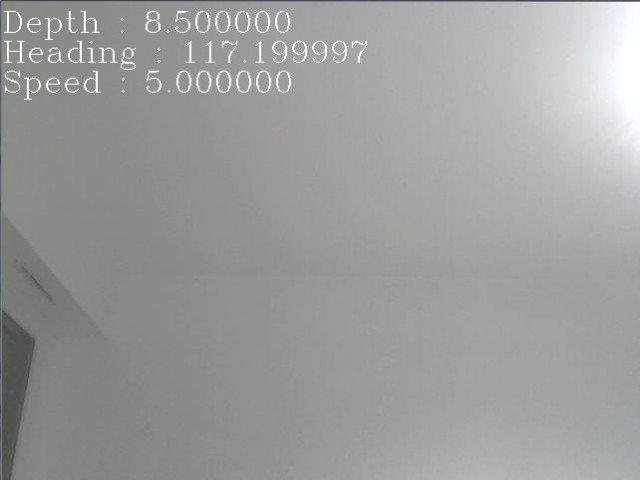
La construction :

La première image de la caméra avec l'incrustation vidéo :
La solution définitive repose sur l'utilisation de trois moteurs brushless outrunner dont les bobines profiteront d'un traitement anti-corrosion et qui se situent à l'extérieure du compartiment étanche. Les câbles d'alimentations et le câble ethernet (pour les échanges avec l'opérateur en surface) passeront par la cloison à l'arrière du tube central.
L'étanchéité est garantie par des presses-étoupes de piscine.
Les pièces reliant les différents tubes entre eux sont imprimés en 3D par mon imprimante.
L'électronique à bord est constituée d'une Raspberry Pi 3. Elle gère la vidéo et les signaux PWM qui sont envoyés à un régulateur de drone quadricopter. Celui-ci assure également la régulation de l'alimentation électrique.
Le tout est alimenté par une batterie LiPo 4S, 5800 mAh.
La caméra est une raspicam. Je ne compte l'utiliser que pour fournir le flux vidéo en directe. L'enregistrement se fera à l'aide d'une GoPro.
Les moteurs sont des brushless outrunner Turnigy d'une puissance de 200 W (700 kV).
Les hélices sont des Graupner quadripales de 88 mm de diamètre.
Je ne travaille sur ce projet que pendant mes (rares) heures de loisirs et la construction avance lentement.
J'espère que vous trouverez ce projet intéressant et n'hésitez pas à me faire part de vos remarques, questions et suggestions.
#108393 La boulette de ma Prusa...
Posté par
sur 25 mars 2020 - 07:05
dans
Impression 3D et Imprimantes 3D
Aïe ! Bon courage pour la réparation.
#103323 Se procurer plaque ou barre d'acier
Posté par
sur 05 mai 2019 - 02:48
dans
Conseils et aide aux débutants, livres et kits en robotique
A chaque fois que j'ai eu besoin de matière première pour un robot j'ai passé commande sur Block en Stock. Mais j'ai jamais osé usiné dans ma chambre, toujours dans le labo de l'école d'ingé. (qui heureusement ne contrôle pas trop les entrées ce qui m'a permis de me servir du matos bien après avoir fini mes études ).
#95606 Présentation Bacab
Posté par
sur 20 mai 2018 - 10:04
dans
Et si vous vous présentiez?
#95579 Présentation Bacab
Posté par
sur 20 mai 2018 - 04:29
dans
Et si vous vous présentiez?
Bonjour à tous et à toutes,
Comme il est d'usage voici ma présentation : je suis un jeune ingénieur en électronique et j'occupe mon temps libre à la conception et à la réalisation de robots et de modèles réduits. Généralement je me débrouille pas trop mal pour concevoir l'électronique de mes projets mais quand arrive la partie mécanique je me retrouve fort dépourvu et j’espère trouver au sein de la communauté des personnes capables de m'aider (et réciproquement j'espère que je pourrais aider en retour !).
J'ai participé à la coupe de France de robotique il y a quelques années (Beach bots) avec plusieurs amis après quoi je me suis lancé dans la conception d'un R.O.V
A part ça je suis un amateur de jeux vidéo, passionné d'aviation et fan de Star Wars.
Je vous remercie par avance pour votre accueil.




