Bonjour, je viens de commencer un stage dont le projet est de créer un robot quadrupède s'inspirant du travail de James. En ce moment on cherche des solutions pour remplacer les "gros moteurs et la grosse mécanique" du projet original, mais on butte sur plusieurs aspects, on a effectué quelques recherches sur les verins électriques mais leurs performances ne nous semble pas suffisantes (surtout au niveau du rapport force_max/vitesse). Notre projet a pour ambition de rester open source, la start up pour laquelle je travaille cherche avant tout à gagner en visibilité grâce à ce projet, Comme nous sommes tous étudiants nous cherchons des appuis de personnes plus expérimentées afin de nous aider à améliorer l'open dog, si certaines personnes sont intéressées par prendre part à l'aventure et voir comment le projet avance nous sommes ouverts à toutes idées.
Contenu de Romaric
Il y a 140 élément(s) pour Romaric (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#102495 openDog, le quadrupède de James Bruton
 Posté par
sur 12 mars 2019 - 05:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 12 mars 2019 - 05:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#102527 openDog, le quadrupède de James Bruton
Posté par
sur 14 mars 2019 - 12:36
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Alors je vais essayer de répondre à tous le monde le plus clairement possible. Nous sommes 3 étudiants à travailler sur le projet sur une durée de 4 à 5 mois, l'idée originale était vraiment de reprendre le travail de James afin de pouvoir respecter le délais (autrement dit pour palier notre manque d'expérience). Cependant nous ne voulons pas non plus nous limiter à réaliser une simple copie de l'opendog et retravailler la mécanique des jambes nous paraît le chose la plus pertinente à faire. Niveau budget on n'est pas trop limité (ça se compte en plusieurs milliers d'euros). Pour ce qui est des contraintes techniques la principale est notre manque d'expérience et la jeunesse de la start-up, il n'y a pas vraiment de cahier des charges à part avoir un robot quadrupède basé sur l'opendog donc on garde les dimensions etc mais on essaie de faire mieux.
Nous sommes entrain de chercher des solutions mécaniques plus intéressantes pour les pattes du robot (on veut utiliser des vérins électrique et garder des profilés en alu pour la base des pattes).
Voilà j'espère que j'ai répondu à vos interrogations ^^.
#102530 openDog, le quadrupède de James Bruton
Posté par
sur 14 mars 2019 - 01:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
On est d'accord sur le fait que le robot ne sera jamais une bête de course, après l'autre problème qui se pose sur le choix de l'actionneur c'est qu'on ne veut pas que le robot dépense son énergie à rester en position debout, il nous faut un système qui bloque de manière mécanique les différentes articulations.
#102532 openDog, le quadrupède de James Bruton
Posté par
sur 14 mars 2019 - 03:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
L'idée du réducteur "roue et vis" est pas mal sur le papier mais dans la réalité ils se font rares et de se fait chers ^^
#102534 openDog, le quadrupède de James Bruton
Posté par
sur 14 mars 2019 - 05:46
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Au niveau des caractéristiques on cherche une solution qui nous permette de soutenir la bête (on prend une marge en visant 40kg) du coup il nous faut des couple en sortie très important et c'est là que ça coince (40kg qui se balade au bout d'un profilé de 40cm c'est embêtant), sinon niveau vitesse en sortie du réducteur on a pas besoin de quelque chose de rapide (de l'ordre de 15-20rpm ça suffirait amplement).
#102553 openDog, le quadrupède de James Bruton
Posté par
sur 18 mars 2019 - 09:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Oracid pour ton avis éclairé ! Je partage totalement ton avis sur la difficulté de réalisé un robot (surtout de ce gabarit !) en un intervalle de temps réduit, et je pense que c'est pour ça que la startup a choisi le projet open dog car ils n'avaient pas besoin de partir de zéro. Mais malheureusement j'ai l'impression que l'idée de James de créer une véritable communauté autour de ce projet est tombée à l'eau (sûrement à cause du coût du robot). De ce fait on ne peut pas vraiment compter sur cette communauté et améliorer l'opendog comme le concept original le laissait penser.
Je vais continuer de me renseigner sur la technologie delta, elle m'intéresse beaucoup même si je crains qu'on ne puisse pas en faire le choix. Je vais suivre tes conseils et créer un sujet dédié au "Spacedog" en espérant ne pas perdre en visibilité ^^. Je partagerai le lien sur ce sujet.
#102556 openDog, le quadrupède de James Bruton
Posté par
sur 18 mars 2019 - 12:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le but de ce projet n'est pas de commercialiser le robot mais de promouvoir la philosophie de la startup. Je comprends votre point de vue mais je n'ai pas le pouvoir de changer le projet à ce point, néanmoins pour ma culture personnelle je vais étudier de plus près ce genre de technologie et pourquoi pas passer à la conception de mon propre robot de type delta (enfin si j'ai le temps ^^).
#102560 openDog, le quadrupède de James Bruton
Posté par
sur 18 mars 2019 - 02:47
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Oracid pour ton apport, je suis convaincu par cette solution mais comme je l'ai dit précédemment à Forthman je ne suis pas seul sur le projet et surtout je ne suis pas libre de choisir quelle solution adoptée.. L'équipe a déjà passée pas mal de temps sur l'étude de l'utilisation de vérin électrique alors c'est assez délicat.
#102563 Projet SpaceDog
Posté par
sur 18 mars 2019 - 05:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...


#102564 openDog, le quadrupède de James Bruton
Posté par
sur 18 mars 2019 - 05:38
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oracid c'est clair que mécaniquement si on ne travaille pas un minimum sur la régulation des vérins ça ne va pas du tout être "smooth" 
Voici le lien menant au sujet que je viens de créer sur notre projet si ça vous intéresse : https://www.robot-ma...rojet-spacedog/
A bientôt j'espère !
#102671 Le port série
Posté par
sur 27 mars 2019 - 05:21
dans
Conseils et aide aux débutants, livres et kits en robotique
Non ce n'est pas très clair 
Qu'appelles tu port série ? est ce que c'est le fait que ta carte soit visible ou non ? Changes tu de type de carte dans "outils" ->"type de carte" lorsque tu fais cette opération ? le numéro du port série peut changer lorsque tu changes de carte vérifie que ce soit le bon.
#102698 smart small turtle de keyestudio
Posté par
sur 29 mars 2019 - 02:30
dans
Questions ouvertes
Bonjour, j'espère que cette video pourra t'aider (en particulier à partir de 10'43) : https://www.youtube....h?v=T5N1xO9EU8U
#102832 Projet SpaceDog
Posté par
sur 03 avril 2019 - 03:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Boujour à tous !
Pour ce qui est des vérins électriques on a commandé deux exemplaires de ce modèle : https://www.progress...=18277292179523
Nous ne les avons pas encore essayé, ils ont des caractéristiques intéressants ( mais surtout ils ont un délais de livraison assez rapides contrairement à la majorité des modèles que nous avons étudié ! C'est compliqué de trouver des vérins électriques rapides, pas trop lourds et ayant une charge max de plus de 40kg.
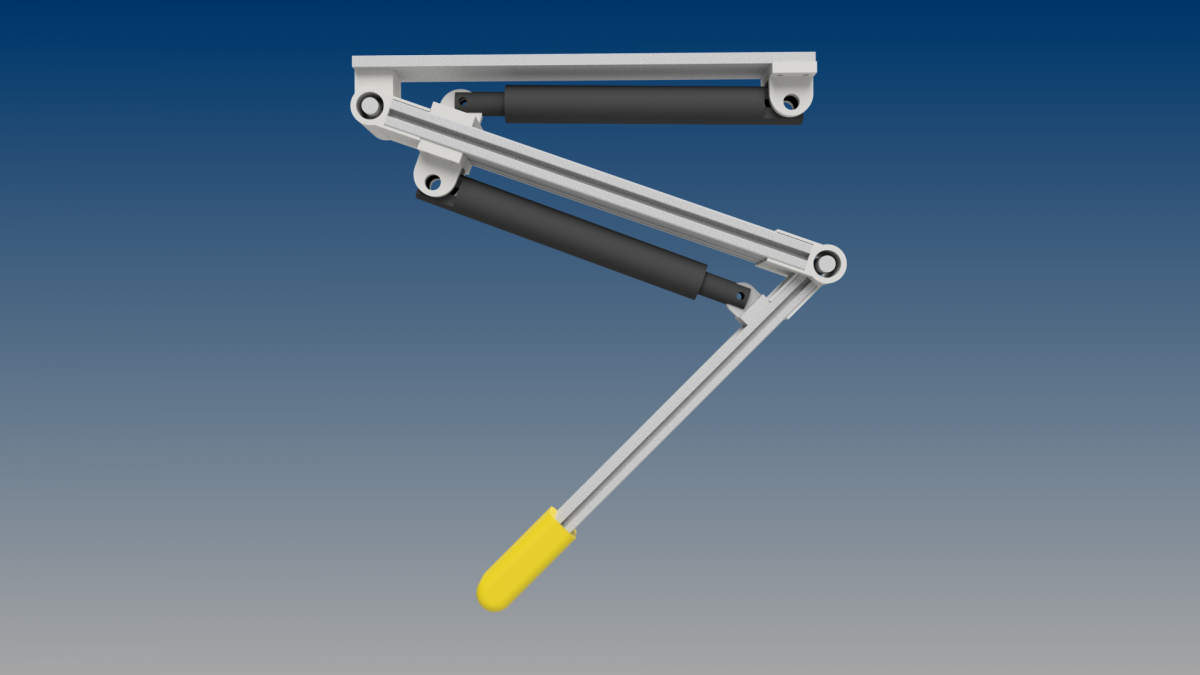
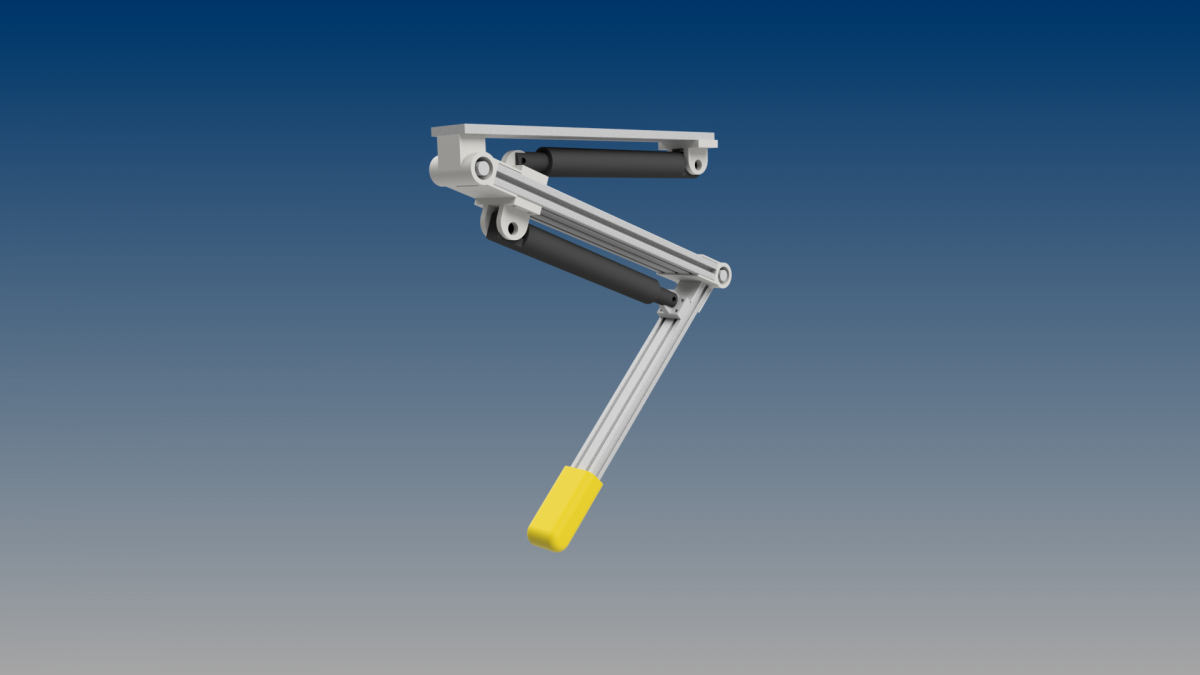
Nous avançons bien sur la modélisation 3D du robot :

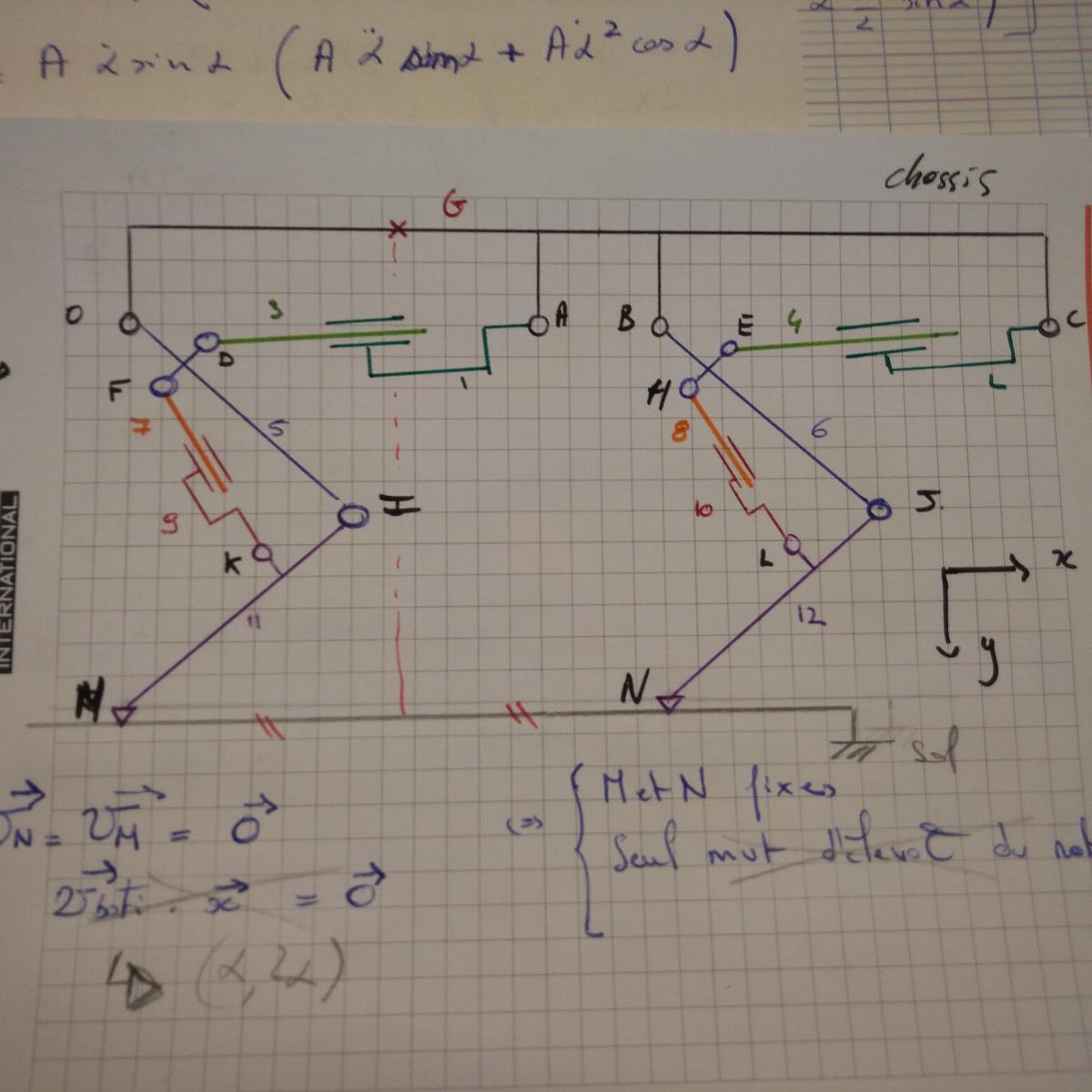
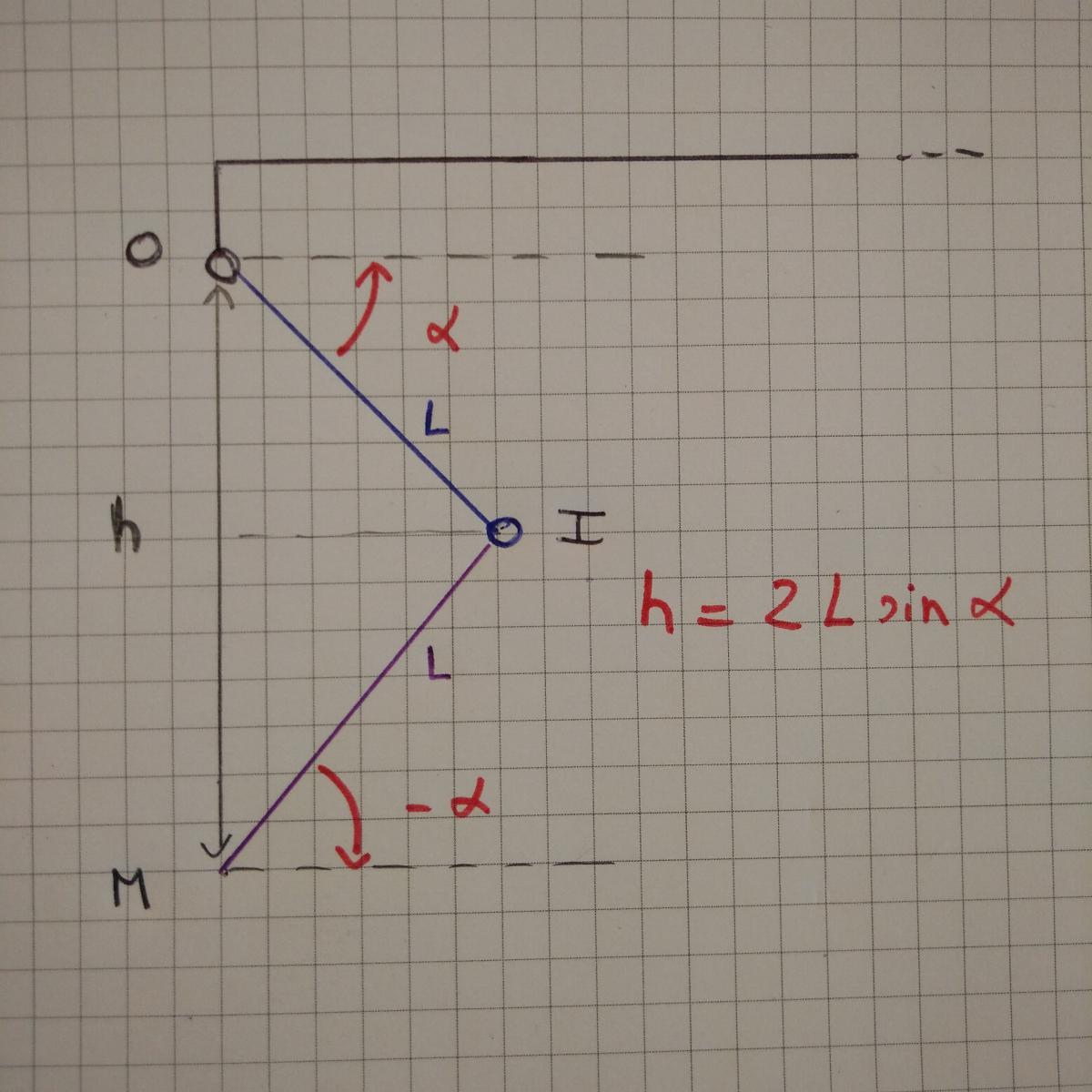
En parallèle nous essayons de réaliser une étude dynamique du robot afin de trouver le meilleur rapport vitesse d'élévation du robot / force excercée par le vérins, mais nous nous heurtons à certaines difficultées théoriques. Quelqu'un à t-il des bases solides dans ce genre d'études (PFD, théorème de l'énergie cinétique...) ?
#102844 Projet SpaceDog
Posté par
sur 04 avril 2019 - 08:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour Budet !
Nous avons repris le même type de profilé aluminium que ceux utilisé par James sur l'Opendog (20*40 et du 20*60) et notre robot sera certainement plus léger que celui de James. On a choisi le profilé pour faciliter le prototypage (=on peut facilement changer les points de fixations des différents composants), mais le choix des profilés n'est pas forcément celui qui sera réaliser sur le robot final.
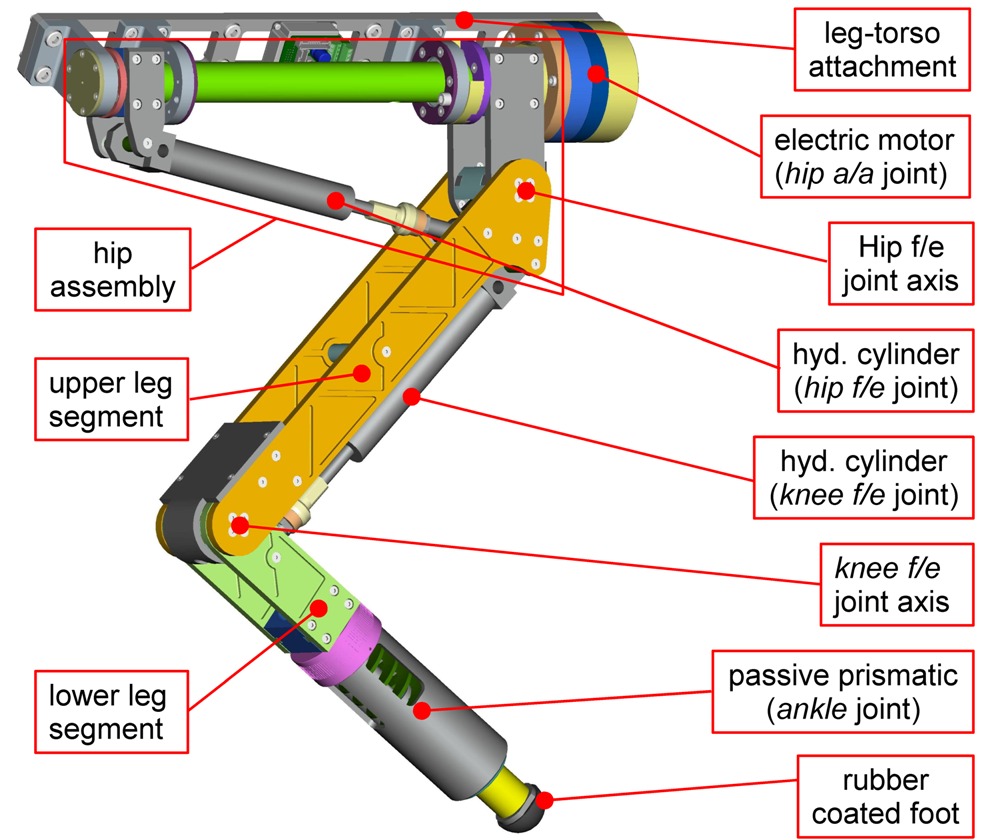
En ce qui concerne le DDL manquant c'est la prochaine étape de notre projet, on veut d'abord valider la structure de la patte avec les deux vérins. La rotation suivant x ne se fera surement pas avec des vérins électriques on s'inspire de cette structure :
#103240 Projet SpaceDog
Posté par
sur 29 avril 2019 - 03:02
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous, il est grand temps de faire le point sur l'avancée de notre projet :
Tout d'abort nous avons réalisé un banc d'essai afin de tester le premier prototype de patte du robot, ce banc nous permettra d'effectuer différents tests sans endommager le prototype. Voici une photo de celui-ci :

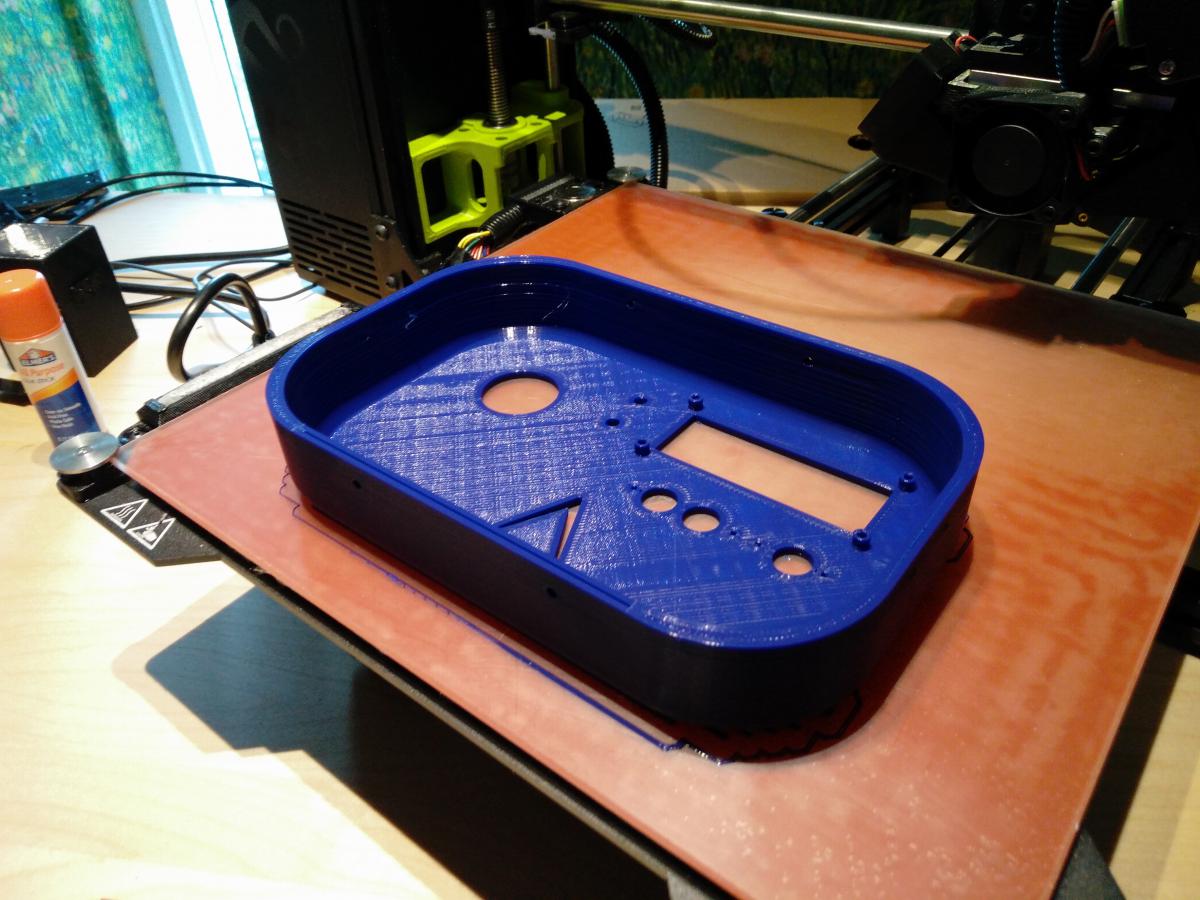
Pour le premier prototypage de notre patte nous avons fait le choix d'imprimer en 3D la majeure partie des éléments composant notre patte (hormis l'électronique et les profilés bien entendu). Voici quelques exemples d'impressions réalisées par nos soins :
- le pied (PLA bleu et flex pour améliorer l'accroche)

- les jonctions entre profilés et les axes en nylon


- des supports pour encodeur (je posterai un autre message présentant l'électronique de la patte dans un futur proche)

Voici un appercu de la composition d'une patte de robot

Il reste encore quelques détails à peaufiner mais le premier prototype de la patte est bien là :

.... et miracle elle bouge !!!
 File from iOS.MOV 6,89 Mo
250 téléchargement(s)
File from iOS.MOV 6,89 Mo
250 téléchargement(s)
Nous revenons vers vous très bientôt, il y a encore pas mal d'informations qui vous attendent, et surtout n'hésiter pas à nous faire part de vos remarques !!
#103259 Projet SpaceDog
Posté par
sur 30 avril 2019 - 08:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut, merci pour vos remarques ! 
Niveau mécanique c'est un peu léger, mais votre approche très "pro" (banc d'essai + qualité de réalisation) devrait vous permettre de
vous améliorer rapidement.
C'est du très beau boulot bravo les gars
(oh! j'ai fait une critique positive sur un projet ! ça me fait tout bizarre
)
Forthman si tu parles des jonctions entre profilés imprimées en nylon, rassure toi il est prévu de passer à des pièces en alu par la suite, les impressions sont là pour ne pas perdre trop de temps et aussi d'argent ^^
Budet avait émis des doutes sur la section des profilés je ne sais pas si tu les partages ?
#103266 Projet de fin d'année Très important
Posté par
sur 30 avril 2019 - 02:59
dans
Programmation
En théorie tu as raison, mais malheureusement dans la pratique ton robot ne sera pas capable de faire un virage à 180° et le décalage que tu auras rendra tes trajectoires non parallèles.
#103288 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 02 mai 2019 - 08:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut, par curiosité, tu envisages d'utiliser quel type de plastique pour imprimer tes barbotins ?
#103290 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 02 mai 2019 - 11:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci pour l'information, je suis pressé de voir si ça va être assez résistant ^^
#103305 Projet SpaceDog
Posté par
sur 03 mai 2019 - 10:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut tout le monde !
En ce moment on réfléchit pas mal sur le troisième DDL de notre patte et on aurait besoin d'un peu d'aide pour nous aiguiller dans nos choix. Pour commencer, on souhaite utiliser un système de roue et vis sans fin pour ce DDL, cela permettrait d'avoir un couple important, des vitesses faibles mais aussi d'assurer le caractère irréversible de la liason.
Avant de choisir la roue et la vis adéquat il nous faut choisir l'actionneur, on souhaite partir sur des moteurs brushless et c'est là que vous intervenez !  On a besoin d'aide pour choisir le moteur adapté, en se tournant vers les moteurs utilisés par James Bruton sur le projet Opendog https://hobbyking.co...nner-motor.html on s'est demandé s'ils n'étaient pas un peu trop puissant (et lourds par conséquents) ?
On a besoin d'aide pour choisir le moteur adapté, en se tournant vers les moteurs utilisés par James Bruton sur le projet Opendog https://hobbyking.co...nner-motor.html on s'est demandé s'ils n'étaient pas un peu trop puissant (et lourds par conséquents) ?
Pouvez-vous nous aiguiller à ce sujet ? Indiquer moi s'il vous faut plus de données.
Les caractéristiques que l'on souhaite avoir sont les suivantes :
-Couple max 20 Nm
-Vitesse de rotation max 30 RPM
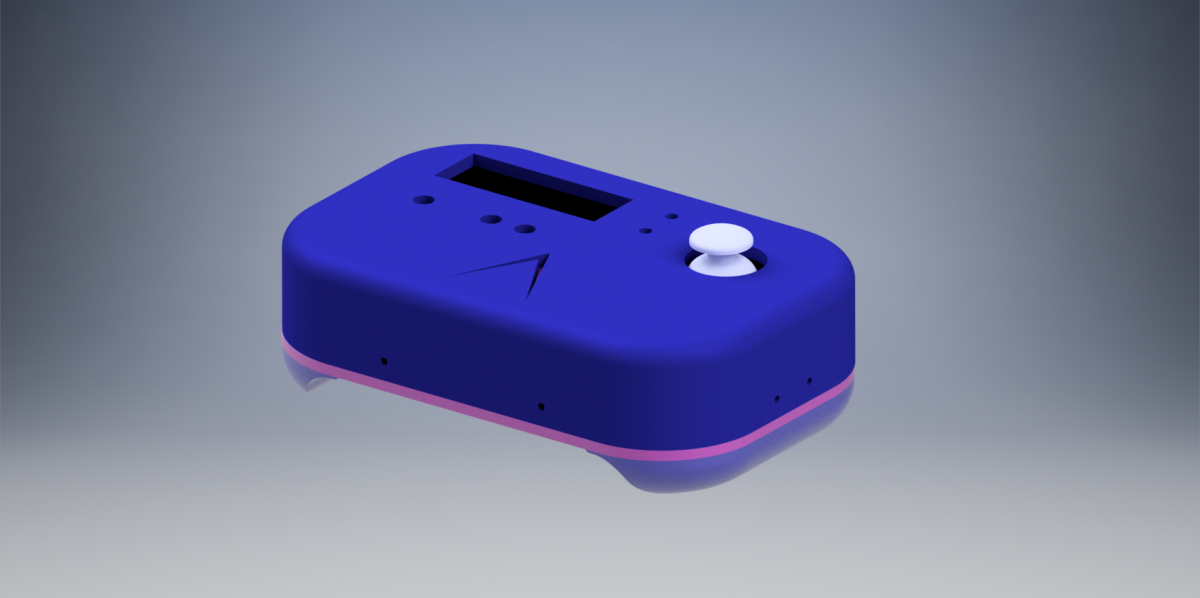
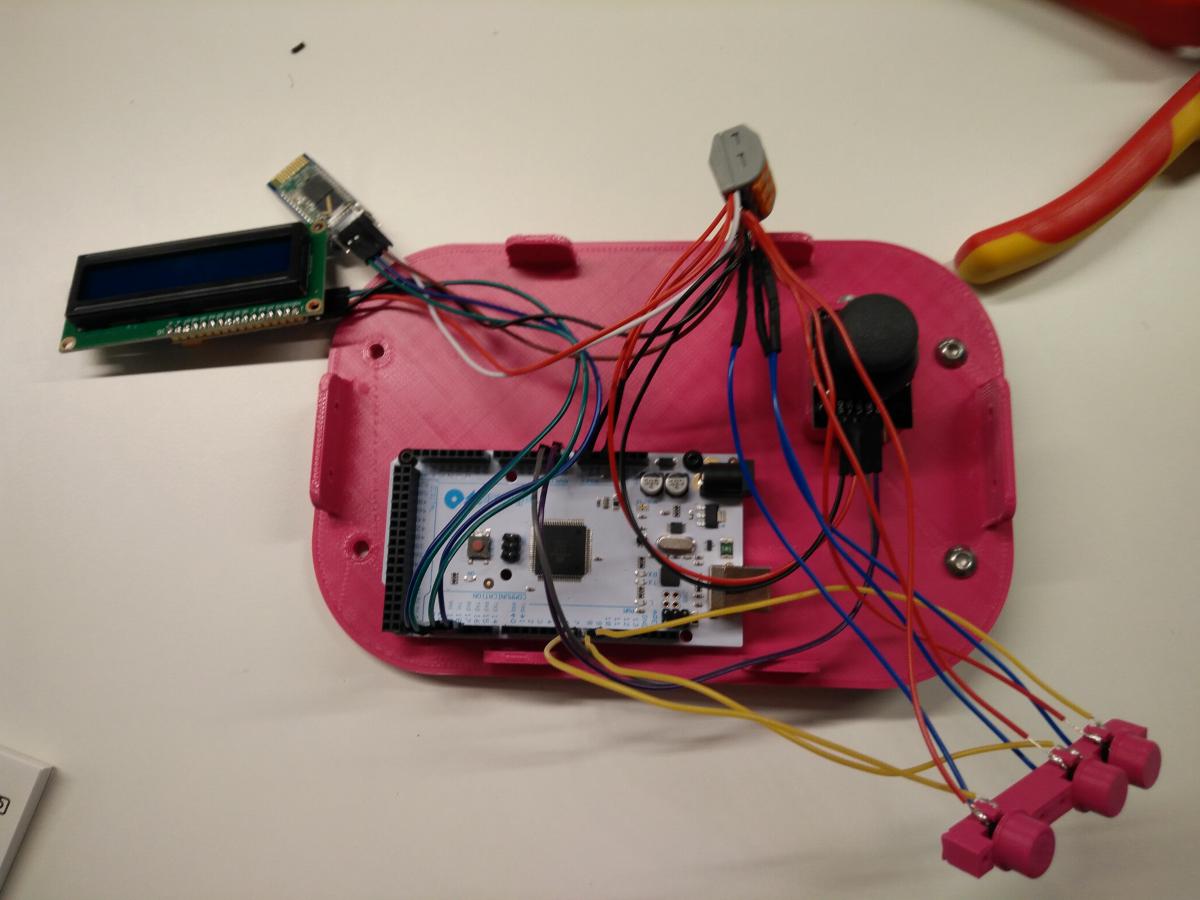
Pour vous remercier vous avez le droit d'avoir un apperçu de notre première manette de contrôle totalement imprimée par nos soins 

#103311 Projet SpaceDog
Posté par
sur 03 mai 2019 - 01:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Voici les calculs approximatifs que nous avons réalisé pour l'étude du moteur brushless, corrigez nous si vous voyez des erreurs :
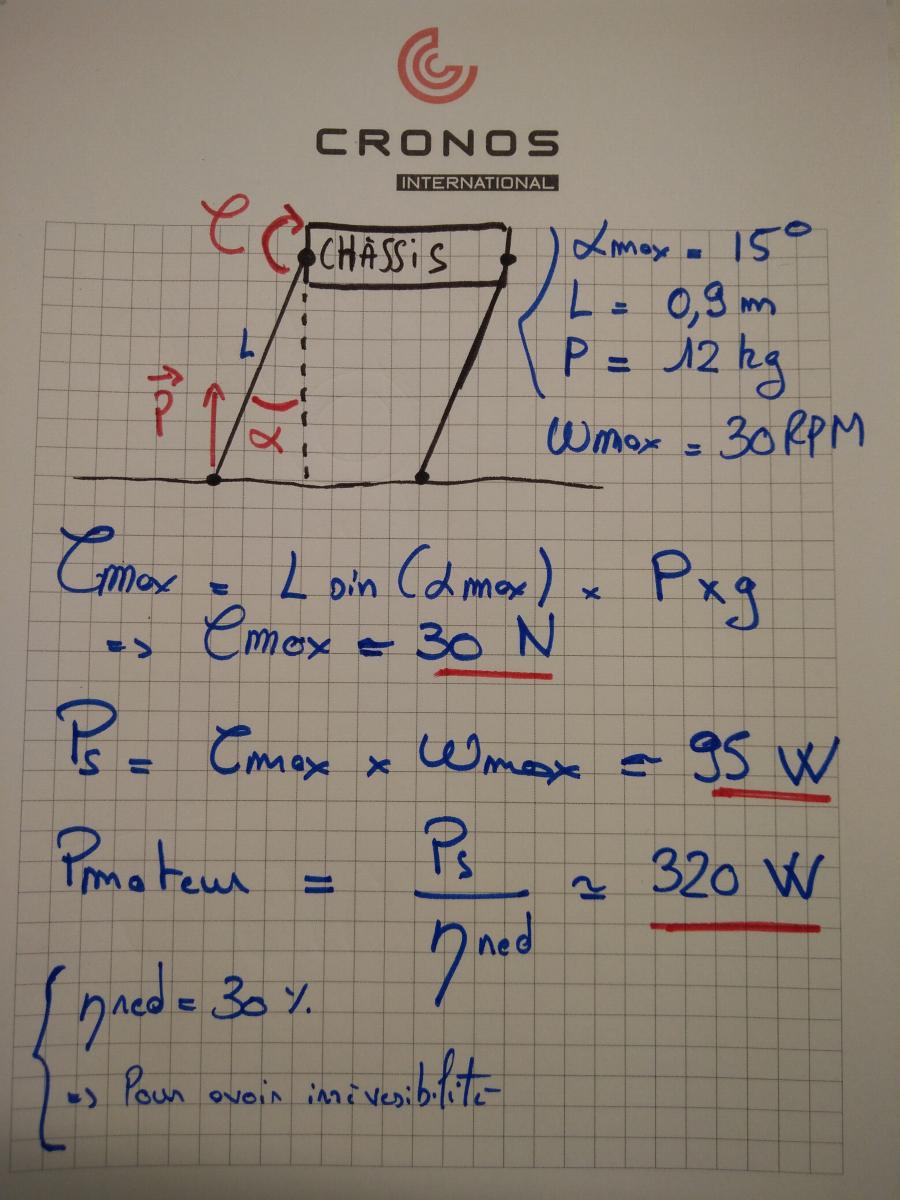
Même en ajoutant des pertes et une marge d'erreur encore plus importante on restera loin des plus de 2000W du moteur de James, des avis ?
#103541 Projet SpaceDog
Posté par
sur 16 mai 2019 - 02:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous ! On revient avec du changement
Nous avons abandonné l'idée du système roue et vis sans fin pour le troisième DDL, c'était un véritable casse tête à dimensionnner et à implanter proprement sur le prototype de châssis  . De plus ce type de système est très lourd et notre robot aurait vite pris des kilos en trop.
. De plus ce type de système est très lourd et notre robot aurait vite pris des kilos en trop.
Ok mais comment trouver une meilleure altenative ???
On est revenu sur la solution la plus simple : les vérins electriques ! Cela nous simplifie la vie d'un point de vue mécanique et comme on a pas besoin d'une longueur de course très importante le poids est très interressant.
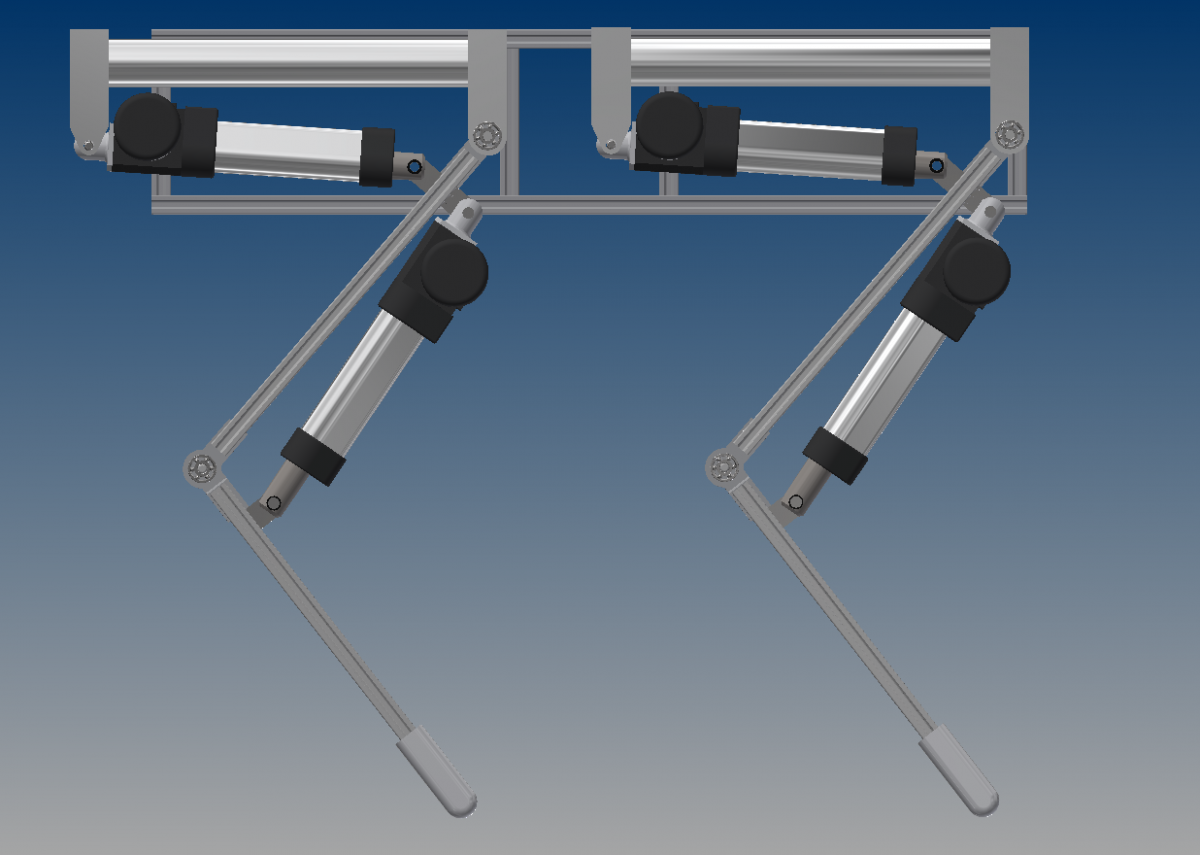
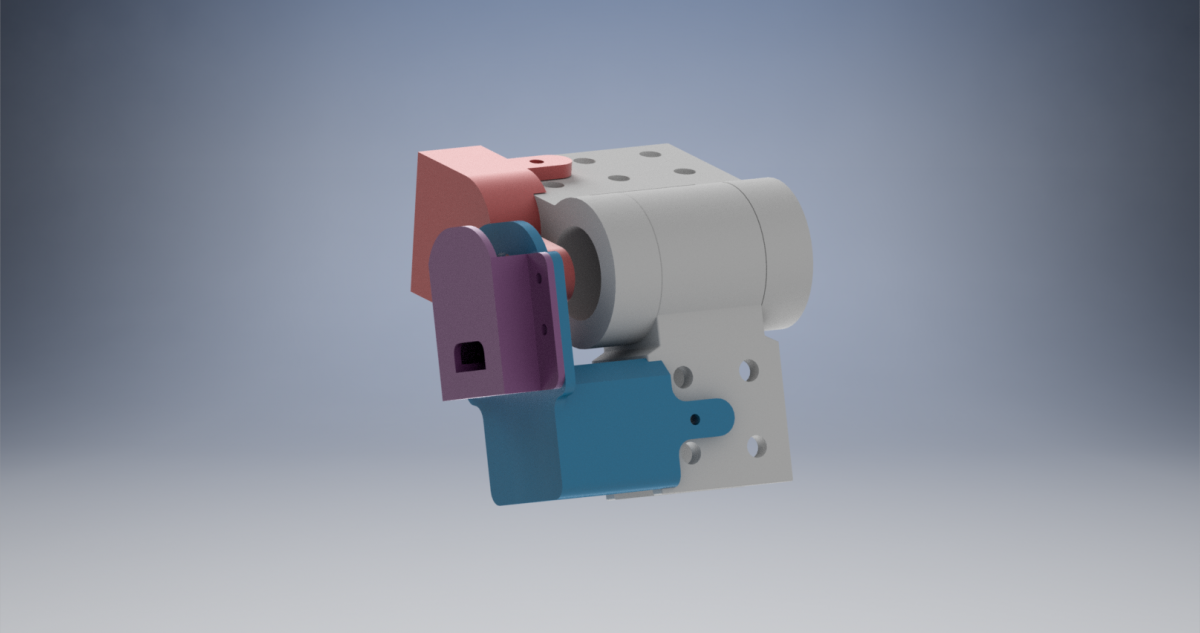
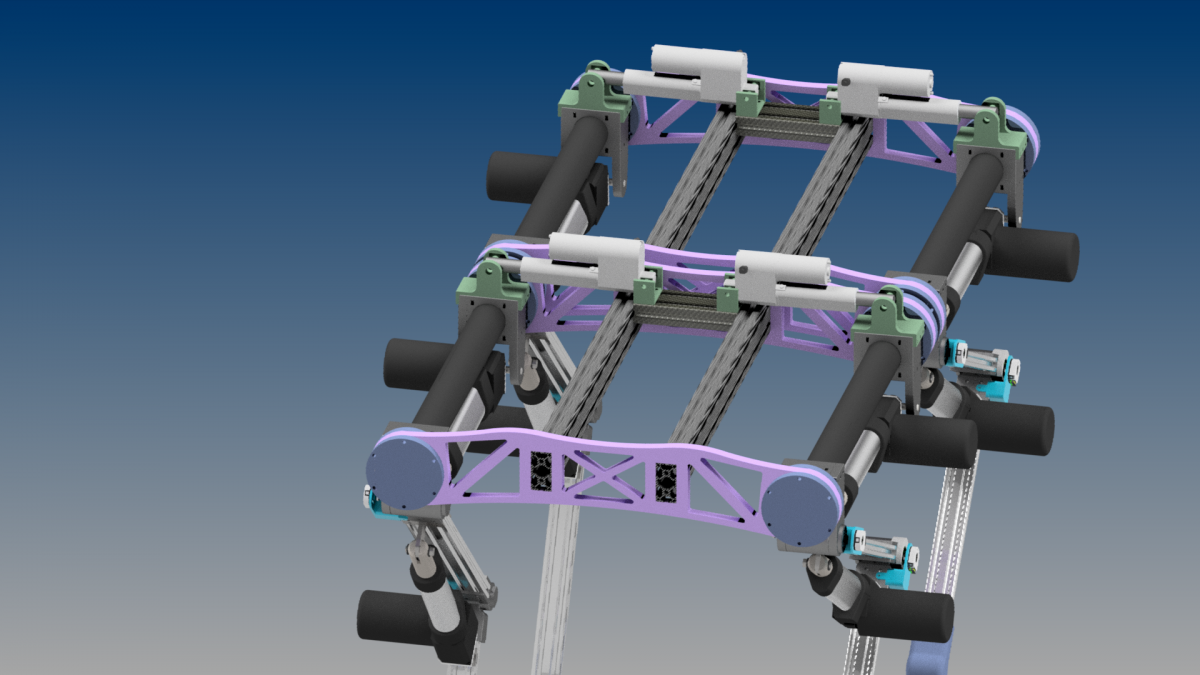
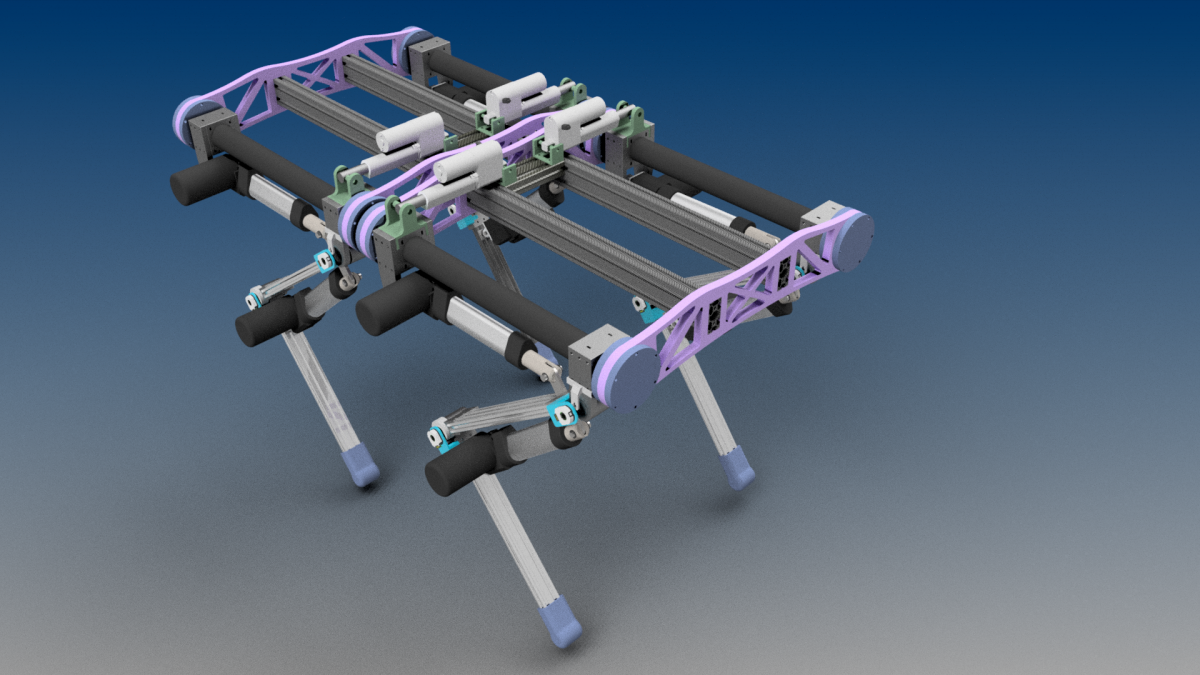
On a beaucoup travaillé sur l'optimisation du châssis dont voici un apperçu :
#103551 Projet SpaceDog
Posté par
sur 17 mai 2019 - 08:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour Oracid, merci pour ta remarque perspicace . On avait déjà remarqué que le porte à faux était très important mais théoriquement il nous est possible d'inverser le sens des pattes arrières afin d'avoir une structure en "X" qui serait beaucoup plus équilibrée (comme tu nous le suggères). L'équipe chargée du soft aura juste un peu plus de travail  .
.
#103558 Projet SpaceDog
Posté par
sur 17 mai 2019 - 04:38
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
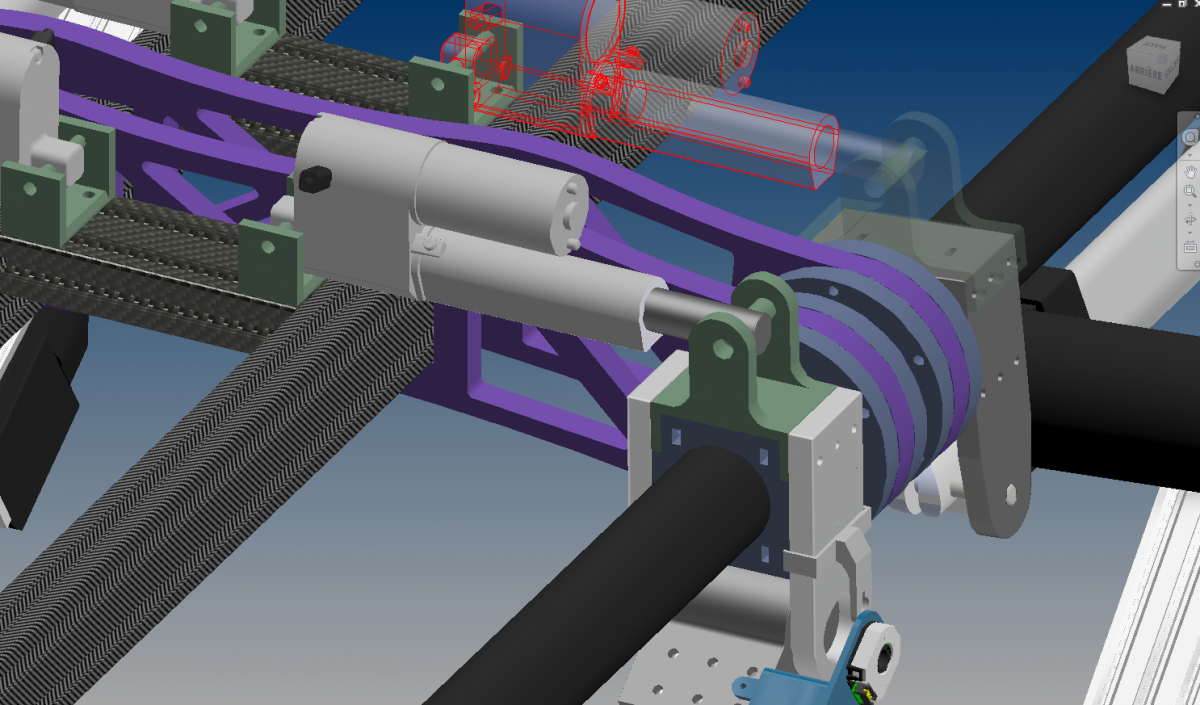
Je viens de comprendre de quoi tu parles Oracid, le vérin supérieur n'est pas orienté de la même façon et c'est ce qui crée le porte à faux :
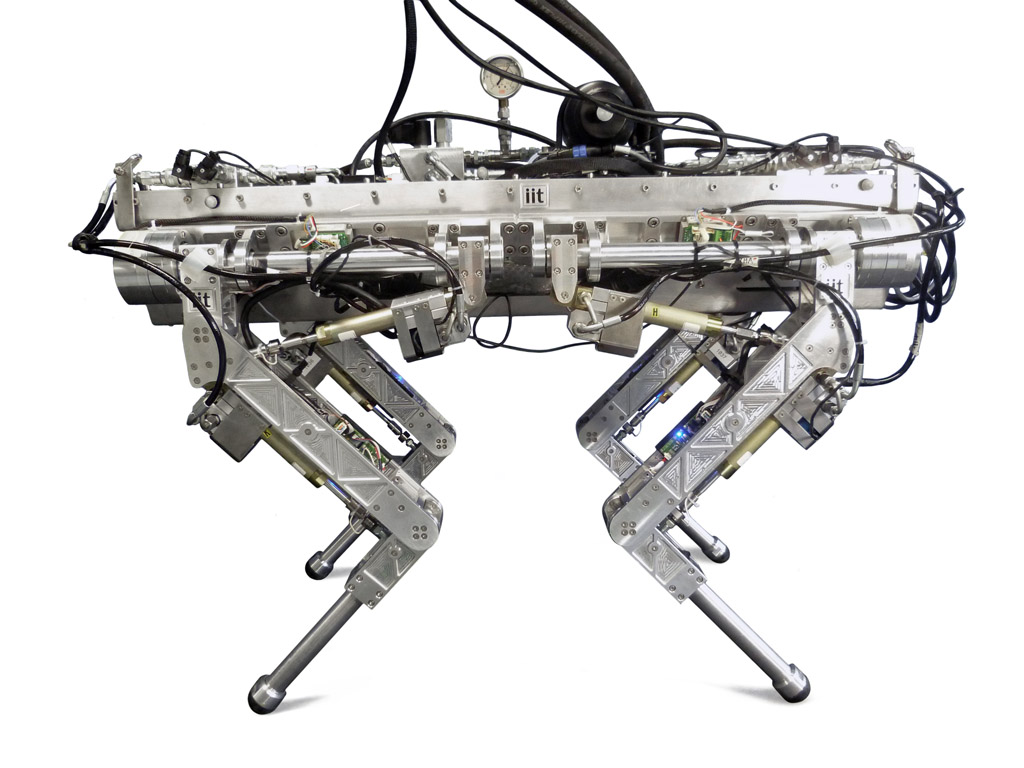
Nous nous sommes plus inspirés du HYQ plutôt que de l'opendog pour le design des pattes, et avec une configuration en X notre problème de porte à faux ne devrait plus en être un.
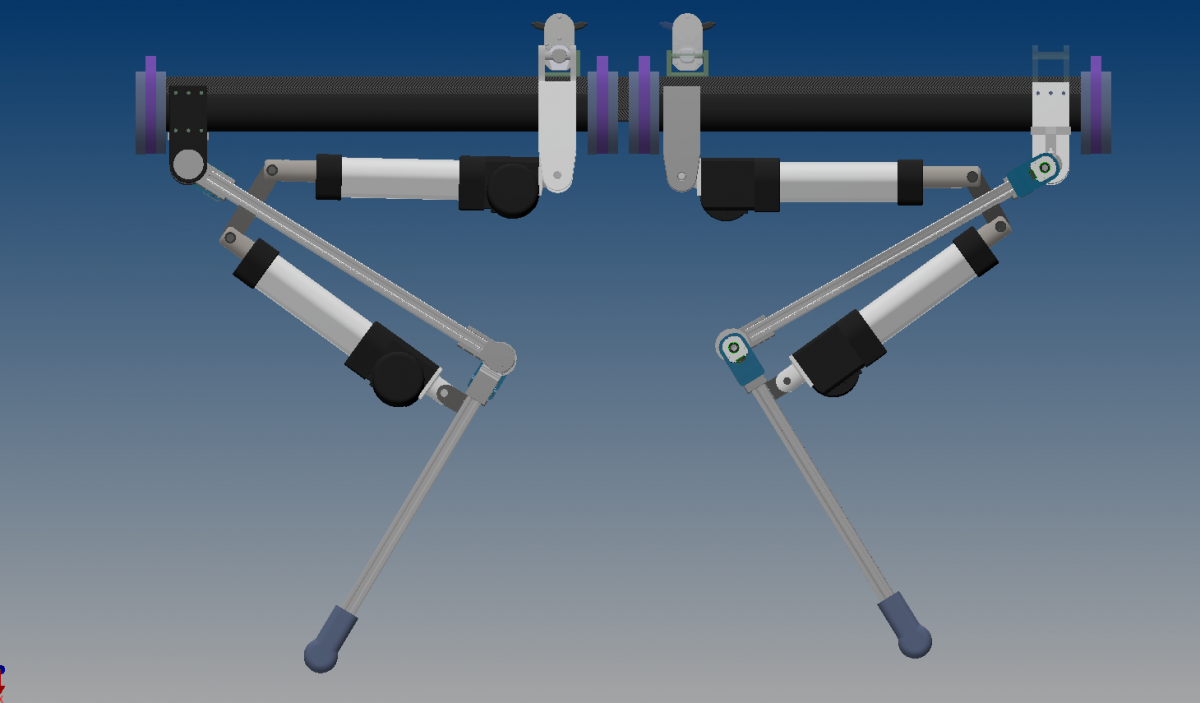
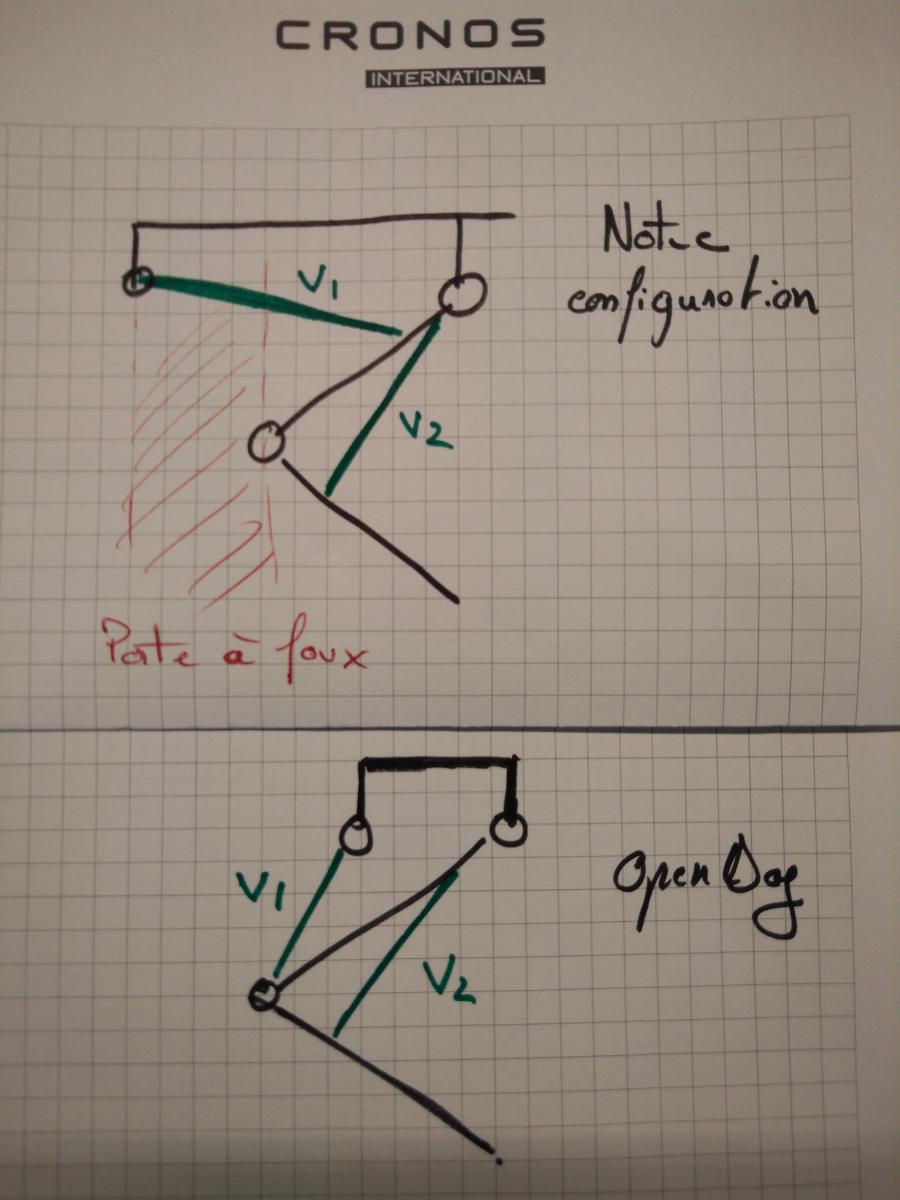
@Forthman c'est vrai que la longueur de nos vérins nous contraint beaucoup mécaniquement  Je vais étudier un peu cette configuation par curiosité.
Je vais étudier un peu cette configuation par curiosité.
#103624 Récupérer composant: Imprimante, vieux ordi, ect...
Posté par
sur 24 mai 2019 - 02:16
dans
Recyclage
Perso j'ai désossé une imprimante epson dx7400 il y a un petit moment et j'ai deux moteurs DC qui m'attendent dans une boîte mais j'ai trouvé aucune spécification sur eux, vous avez une idée de leur tension d'alim par hasard ?




