POur aller au moteur, le jus passe par les 2n2222, et oui, il a trois pattes lui. Quand a la diode IR, elle sera alimenter directement par le µc.
Contenu de Microrupteurman
Il y a 1000 élément(s) pour Microrupteurman (recherche limitée depuis 25-mai 13)
Par type de contenu
Voir pour ce membre
#62694 Petit robot miniature
 Posté par
sur 20 novembre 2014 - 11:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 20 novembre 2014 - 11:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
#62709 Petit robot miniature
Posté par
sur 21 novembre 2014 - 12:19
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je pense que tu devrai te renseigner sur les transistor, va voir sur sonelec music.
#62737 Petit robot miniature
Posté par
sur 22 novembre 2014 - 02:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il ne faut pas désespérer, l’électronique nous joue des tours parfois.
Par contre, je comprend pas ce que tu veux dire dans ton dernier paragraphe. Pourrais tu l'illustrer ?
#62771 Petit robot miniature
Posté par
sur 24 novembre 2014 - 01:11
dans
Robots roulants, chars à chenilles et autres machines sur roues
En fait je ne suis pas sur de comprendre l'utilité du transistor, ou son fonctionnement.
Dans ton cas, en gros, il sert d’interrupteur pour activer le moteur. Le transistor étant activer par le µc.
Les µc ne sont pas concu pour driver un moteur en direct, il faut un etage de puissance, ici ton transistor, qui, par ailleurs, permet de faire passer la 'quantiter' (defini par l'impulsion pwm envoyer par le µc au transistor ) de jus que tu veux au moteur.
#62685 Petit robot miniature
Posté par
sur 20 novembre 2014 - 06:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Une fois le projet mener a terme, il serai très intéressant de faire un tuto....
#62635 Petit robot miniature
Posté par
sur 18 novembre 2014 - 09:16
dans
Robots roulants, chars à chenilles et autres machines sur roues
Sujet très pertinent, je suis ça de prés ! Pour les µc, il y a les attiny (3€) d'atmel qui ce programme avec une arduino .
#101490 Conception de ma télécommande
Posté par
sur 14 janvier 2019 - 03:42
dans
Impression 3D et Imprimantes 3D
Des petits potars pour contrôler une tourelle pan tilt en position par exemple.
#105958 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 28 octobre 2019 - 09:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
Fait comme tu le sent. Il y aura forcement des pièces faisables sur des petites machines
#106004 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 01 novembre 2019 - 11:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
les temps d'impression mais j'en ai pour plusieurs jours
Change de buse. Désormais, je fait tout avec buse de 0.6, passe de 0.3
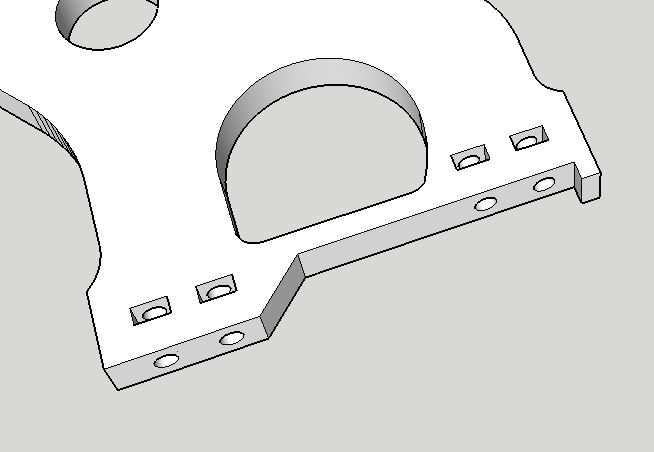
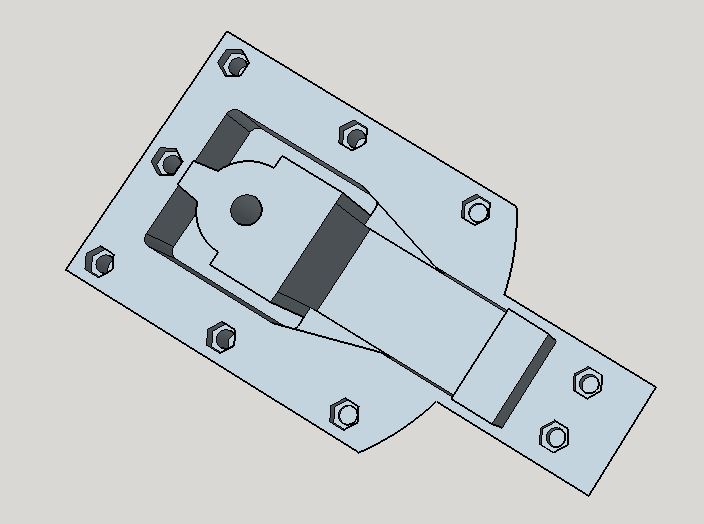
Je me demande si pour assembler les différents éléments ensemble j'utilise des vis+inserts ou vis+écrous,
J'utilise vis-ecrous. Je modélise la forme des écrous en creux la ou il vont = pas besoin de clé et ça permet de les mettres là ou normalement tu pourrai pas.
ex:
#106311 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 17 novembre 2019 - 10:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
De toute façon, les trucs genre détection coupure de courant et changement de filament en plein milieu de l'impression, t'as 2 chance sur 3 que ça rate...
#111536 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 28 octobre 2020 - 09:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
Déjà t'as de la 4G c'est bien ^^.
J'ai une connection toute pourrie, je peut mettre max 400kbps en upload pour avoir un truc qui lag pas trop. Mais ca ne m’empêche pas de m'amuser, je ne resterai pas toute ma vie avec cette co pourrave. Mon but actuel est d'envoyer au max avec le wifi pour que le robot puisse aller assez loin, là ou la 4G passe...
#111528 Magellan, robot d'exploration imprimé en 3D
Posté par
sur 27 octobre 2020 - 10:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
ma connexion Internet,
Tu as testé en 4G ?
#48221 Et vous où habitez vous ?
Posté par
sur 28 août 2012 - 07:06
dans
Apérobots et autres rencontres IRL
C'est fait !
#46703 Et vous où habitez vous ?
Posté par
sur 18 juillet 2012 - 04:18
dans
Apérobots et autres rencontres IRL
J'habite a 200km de biaritz
#47966 Et vous où habitez vous ?
Posté par
sur 20 août 2012 - 08:47
dans
Apérobots et autres rencontres IRL
Comment on s'ajoute ???
#49960 supprime
Posté par
sur 26 octobre 2012 - 05:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Moi je pense que les modo qui ne sont jamais la devrai netoyer le topic.
#38950 supprime
Posté par
sur 22 février 2012 - 08:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Vous sous-estimé la solidité du carton.....
#69730 Propositions d'améliorations:
Posté par
sur 05 mai 2016 - 10:28
dans
Les annonces Robot Maker
J'aurai besoin de pouvoir poster des fichier de type .rar ou .skp dans la creations des tutos. Pour l'instant je suis bloqué.
#34825 Lecture capteur temperature
Posté par
sur 11 octobre 2011 - 08:43
dans
Electronique
je vient de débrancher mon cerveau et mon capteur ir, et effectivement maintenant c'est plus precis, meme si j'ai un doute sur la temperature qu'il affiche .
#35964 Info Capteur US
Posté par
sur 13 novembre 2011 - 02:47
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut,
Une fois encore (comme d'habitude en fete) j'ai besoin de conseil pour l'aquisition d'un capteur US.
Mon choix ce porte (pour l'instant) sur ces 2 capteur :
-Capteur SeedStudio
- DFR URM37 V3.2
Pour le 1er j'ai trouvé un code de lecture :
Si je l'ai bien compris, on envoi du jus dans le capteur, ensuite on le passe en entré est on a la duré de l'onde enoyé.
Ici, converti en cm est sur le Serial monitor. Apparement il se connecte simplement sur une pin digital.
Pour le Second, ca a l'air plus compliqué, il y a 9pin.... Toute decrite bien sur Mais je n'ai pas encore trouver un exemple de code de lecture. Je ne sais pas non plus ou le brancher sur l'arduino .
Lequel de ces deux capteur me conseillerez vous ??
Merci, encore et encore !:!,$
Une fois encore (comme d'habitude en fete) j'ai besoin de conseil pour l'aquisition d'un capteur US.
Mon choix ce porte (pour l'instant) sur ces 2 capteur :
-Capteur SeedStudio
- DFR URM37 V3.2
Pour le 1er j'ai trouvé un code de lecture :
/* Ping))) Sensor
This sketch reads a PING))) ultrasonic rangefinder and returns the
distance to the closest object in range. To do this, it sends a pulse
to the sensor to initiate a reading, then listens for a pulse
to return. The length of the returning pulse is proportional to
the distance of the object from the sensor.
The circuit:
* +V connection of the PING))) attached to +5V
* GND connection of the PING))) attached to ground
* SIG connection of the PING))) attached to digital pin 7
http://www.arduino.cc/en/Tutorial/Ping
created 3 Nov 2008
by David A. Mellis
modified 30 Jun 2009
by Tom Igoe
This example code is in the public domain.
*/
// this constant won't change. It's the pin number
// of the sensor's output:
const int pingPin = 7;
void setup() {
// initialize serial communication:
Serial.begin(9600);
}
void loop()
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(15);
digitalWrite(pingPin, LOW);
delayMicroseconds(20);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds)
{
// According to Parallax's datasheet for the PING))), there are
// 73.746 microseconds per inch (i.e. sound travels at 1130 feet per
// second). This gives the distance travelled by the ping, outbound
// and return, so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}Si je l'ai bien compris, on envoi du jus dans le capteur, ensuite on le passe en entré est on a la duré de l'onde enoyé.
Ici, converti en cm est sur le Serial monitor. Apparement il se connecte simplement sur une pin digital.
Pour le Second, ca a l'air plus compliqué, il y a 9pin.... Toute decrite bien sur Mais je n'ai pas encore trouver un exemple de code de lecture. Je ne sais pas non plus ou le brancher sur l'arduino .
Lequel de ces deux capteur me conseillerez vous ??
Merci, encore et encore !:!,$
#34562 Consommation Servo
Posté par
sur 04 octobre 2011 - 04:06
dans
Electronique
Enfete, j'ai pas réellement trouvé, ca beug encore
#34843 Lecture capteur temperature
Posté par
sur 12 octobre 2011 - 01:03
dans
Electronique
Je suis bien sur la carte arduino.
Le capteur de température fonctionne très bien tout seul avec uniquement son code.
Mais quand je le rattache a mon code qui contrôle les moteurs le capteur IR et le servo, ça va plus : Capteur température + servo =+4° !
capteur température + servo + capteur IR = oscillation de large amplitude 24 a plus de 30°.
J'ai essayé plein de combinaison avec les capteur,servo branché sur un condo, en entrées en sortie, mais ça donne rien...
Le capteur de température fonctionne très bien tout seul avec uniquement son code.
Mais quand je le rattache a mon code qui contrôle les moteurs le capteur IR et le servo, ça va plus : Capteur température + servo =+4° !
capteur température + servo + capteur IR = oscillation de large amplitude 24 a plus de 30°.
J'ai essayé plein de combinaison avec les capteur,servo branché sur un condo, en entrées en sortie, mais ça donne rien...
#35968 Info Capteur US
Posté par
sur 13 novembre 2011 - 03:52
dans
Conseils et aide aux débutants, livres et kits en robotique
Merci.
Pour le URM37, je tombe toujours sur des liens brisé.
Apparement il lui faut une bibliotheque.
Pour le URM37, je tombe toujours sur des liens brisé.
Apparement il lui faut une bibliotheque.
#34817 Lecture capteur temperature
Posté par
sur 11 octobre 2011 - 07:46
dans
Electronique
ok, le + et le - était pas brancher, forcement ca va pas marcher !!
Nempêche ça va pas quand même :
25.68
33.49
27.14
24.70
30.07
26.65
25.68
29.10
26.17
........
ca oscille beaucoup trop et il ne fait pas cette température .
Nempêche ça va pas quand même :
25.68
33.49
27.14
24.70
30.07
26.65
25.68
29.10
26.17
........
ca oscille beaucoup trop et il ne fait pas cette température .
#34815 Lecture capteur temperature
Posté par
sur 11 octobre 2011 - 07:35
dans
Electronique
Bonjour, voila j'ai fai ce capteur : Mon lien. Mais je ne comprend pas lecture.
Le code utilisé est celui du site. Voila ce que ca donne au moniteur :
222.46
109.66
-139.36
-273.15
-273.15
-273.15
-115.925
128.22
226.36
226.36
226.36
61.81
-116.90
-273.15
-273.15
.........
Voila, je ne trouve pas la température la dedans. aidez moi svp. Merci
Le code utilisé est celui du site. Voila ce que ca donne au moniteur :
222.46
109.66
-139.36
-273.15
-273.15
-273.15
-115.925
128.22
226.36
226.36
226.36
61.81
-116.90
-273.15
-273.15
.........
Voila, je ne trouve pas la température la dedans. aidez moi svp. Merci




