En attendant la réception des cartes que j'ai commandé pour les codeurs de mes moteurs afin de débuter la partie télémétrie je commence la modélisation de la télécommande.
Cette télécommande recevra un écran LCD 7" pour l'affichage de la télémétrie et peut-être un retour vidéo d'une des caméras, il y aura aussi un RPi B rev 2 (pas un 2B ! ) qui à mon avis est suffisant pour ce que je veux en faire, à cela s'ajoute 4 joysticks (2 modèles pour télécommande RC et 2 autres pour Arduino/RPi) ainsi qu'une carte Elexol comportant des poussoir, des LEDs et des interrupteurs.
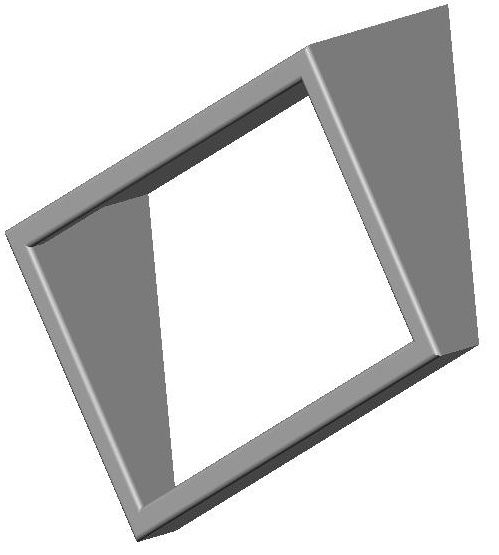
(Ce n'est pas le pare-soleil)
J'ai commencé par modéliser le support d'écran mais je vais recommencer pour corriger certaine chose.
Je me demande quel angle je dois choisir pour l'écran.
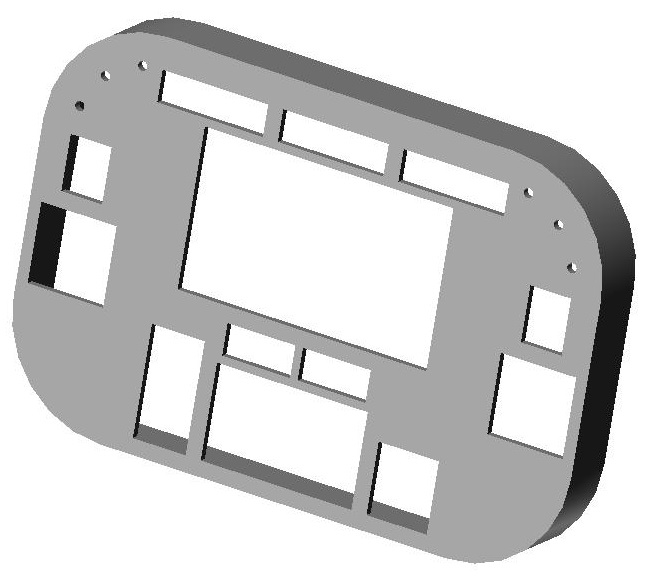
Je précise que cette télécommande sera imprimé en 3D, en plusieurs parties, probable 5 :
- le dessous du boitier
- le dessus du boitier
- le support d'écran
- le pare-soleil
- un module au centre du dessus du boitier pour fixer la carte Elexol mais pour pouvoir la remplacer facilement par autre chose si besoin.
LA contrainte pour l'impression est de ne pas dépasser les 21cm de côté.
Il fait trop chaud pour bosser alors je réfléchi avec tout ce que j'ai dans des boites...
 .
.



 .
.