 Posté par
Posté par
super boulot que tu fait là, et tu en avances à un bon rythme à ce que je vois (j'ai toujours quelques problèmes à rester motivé face à certain problèmes qui me bloquaient dans mes projets, je respecte d'autant plus ceux qui arrivent à fournir un travail constant à leur projet).
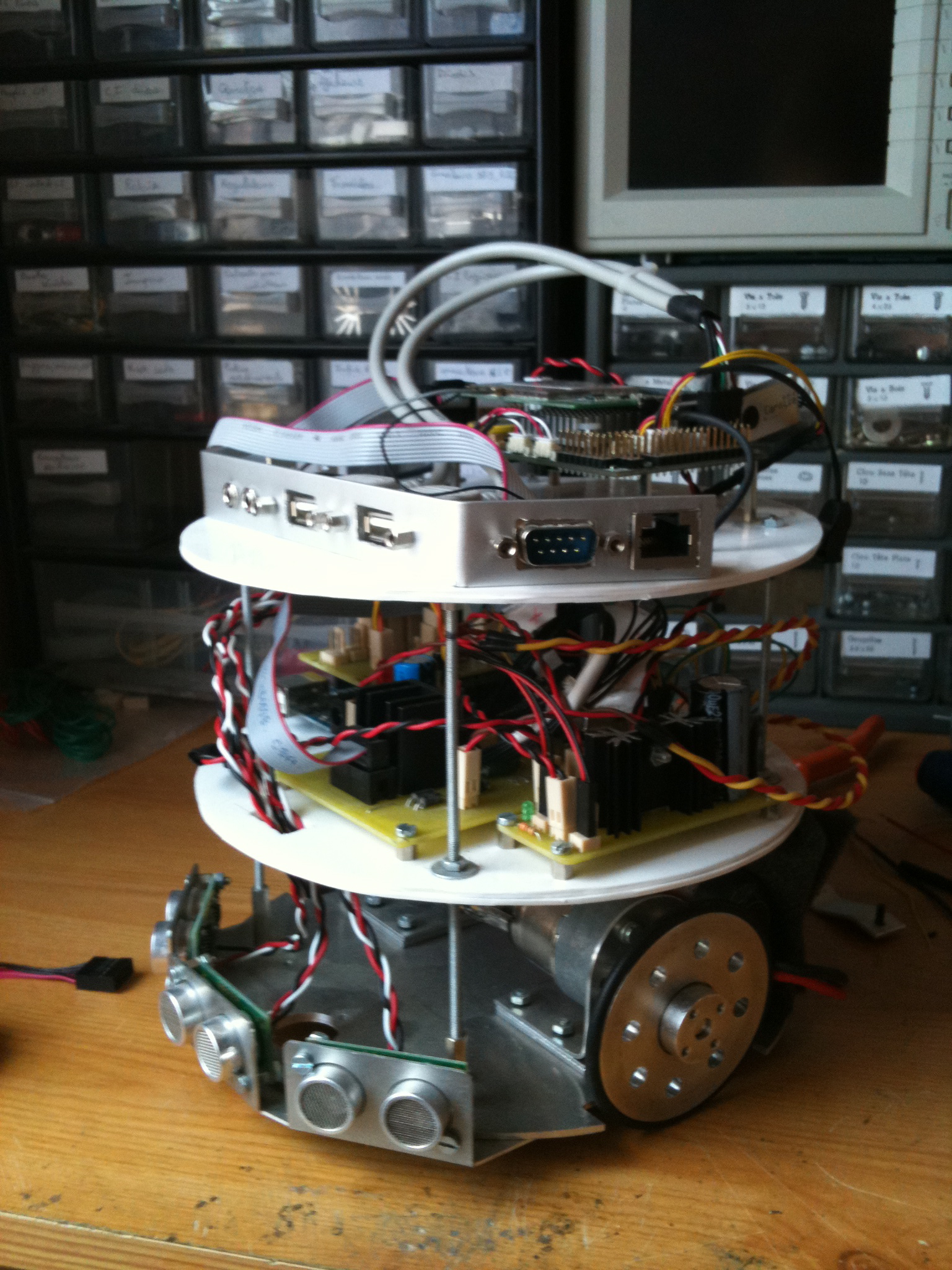
Pour le poids de la bête je dit respect : faut le faire pour tout faire tenir dedans, et plus en ce souciant des problèmes de centre de gravité...
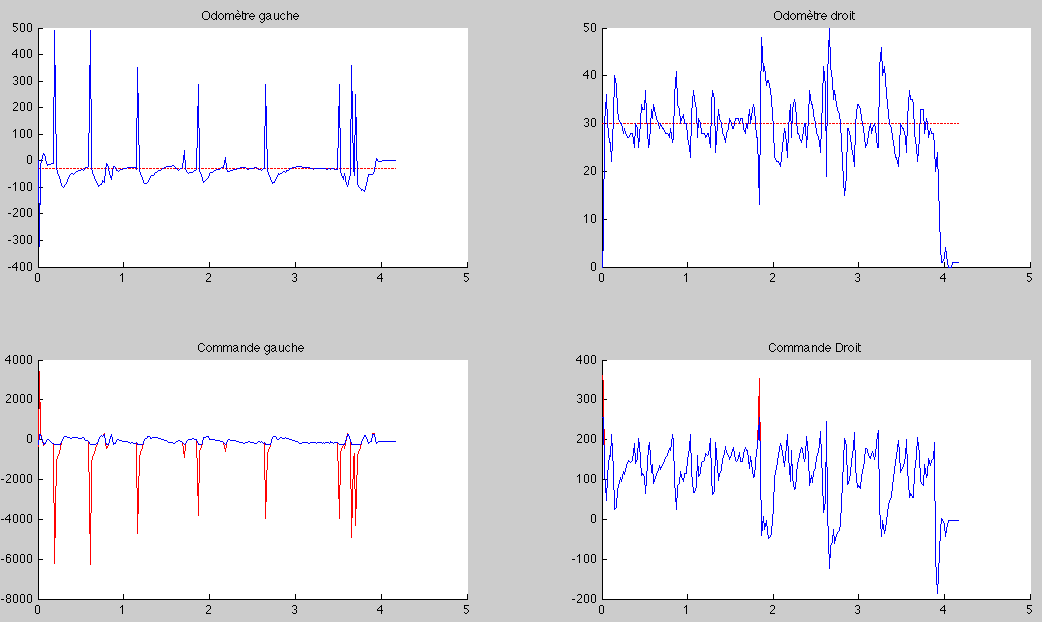
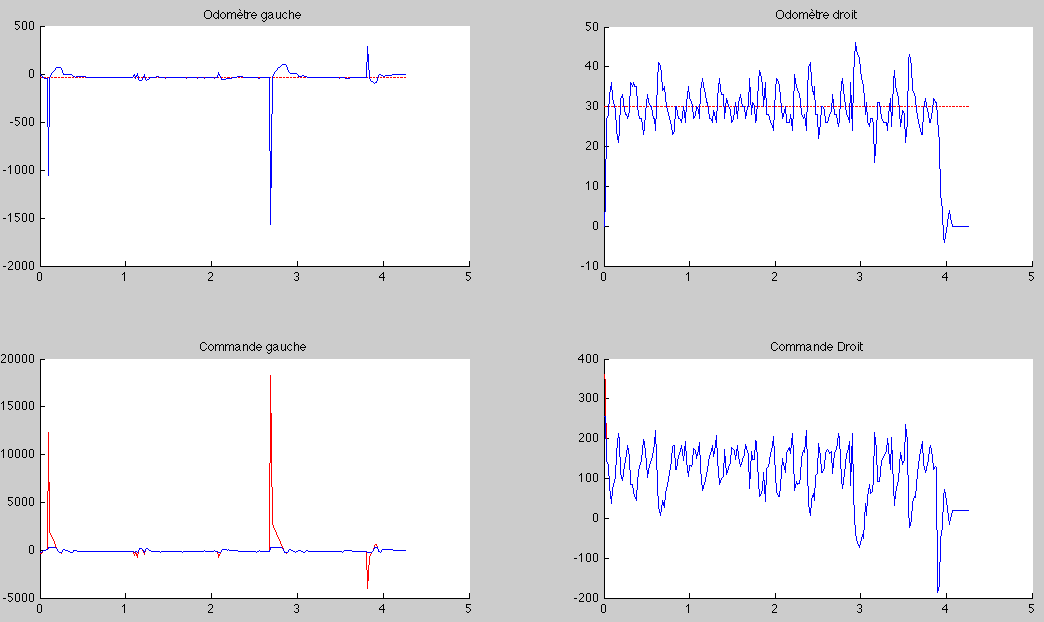
J'ai vu que tu utilisais Matlab pour afficher tes données et faire des tests. J'utilise aussi Matlab, ça fait gagner pas mal de temps pour faire du débug, mais je me demandais comment tu fait pour transmettre tes données à Matlab en temps réel ? il y a des boites à outils pour ça peut être ? Comme je suis en train de travailler sur l'asservissement de mon robot en ce moment ça pourrait m'être très pratique

en tout cas bonne continuation pour ton projet













{kind=link}
{kind=link}