Pas bête l'idée !! Le fait que tu retrouve un caractère sinusoïdal ne me choque pas du tout mais je reviens sur ce qu'il y a été dit plus haut. Mécaniquement parlant, si tu ne gères pas d'une façon ou d'une autre tes frottements en bout de pattes tu feras du sur place
Contenu de Budet
Il y a 366 élément(s) pour Budet (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#83659 Yorkshire, mon petit quadrupède
 Posté par
sur 17 mai 2017 - 07:09
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 17 mai 2017 - 07:09
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#83374 Yorkshire, mon petit quadrupède
Posté par
sur 10 mai 2017 - 10:07
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ah je suis content ! Le résultat est nickel, bien joué  Tu vois, je trouve que l'impression 3D permet d'avoir des meca sophistiqué, rapidement avec une bonne qualité. Ca aurait été dommage de ne pas s'en servir
Tu vois, je trouve que l'impression 3D permet d'avoir des meca sophistiqué, rapidement avec une bonne qualité. Ca aurait été dommage de ne pas s'en servir
#83290 Yorkshire, mon petit quadrupède
Posté par
sur 08 mai 2017 - 07:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pas mal du tout pour un début !!
Un petit conseil esthétique, met des petits congés (0.5 - 1 - 2 mm en fonction) sur les arrêtes qui ne sont pas fonctionnelles, ça rendra mieux
Edit : Tu aurais pas oublié les troues sur ton chassis pour fixer les servos ? Si tu veux percer à la "main" c'est bien de mettre des diamètre plus petit en temps que pré-perçage
#82974 Yorkshire, mon petit quadrupède
Posté par
sur 04 mai 2017 - 10:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pourquoi ne pas utiliser ton imprimante ? Ca te permettrait d'avoir des pièces très légères, à moindre coup (quelques euros de plastique), un résultat très esthétique, et une géométrie de pièce plus ou moins complexe.
#83355 Yorkshire, mon petit quadrupède
Posté par
sur 09 mai 2017 - 08:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Wow j'ai jamais vu une impression comme ça ! Ca vient de quoi ? de ton imprimante ?
#83361 Yorkshire, mon petit quadrupède
Posté par
sur 09 mai 2017 - 10:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Dans le Cura de Dagoma tu peut utiliser "améliorer la surface d'adhésion". Je me trompe peut être mais je vois que tu ne l'as pas utilisé la, ça marche super bien pour moi
#88053 Wall Pi
Posté par
sur 27 septembre 2017 - 05:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
Super projet, tu compte modéliser avec quel logiciel ?
Tu dois avoir de sacré connaissance en programmation pour te lancer dans du mapping.
Bon courage pour le projet, hate d'en voir plus !
#93906 Wall Pi
Posté par
sur 29 mars 2018 - 08:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Starcraft <3
#85430 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 01:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est la que je trouve que vous avez tord... Les simulations permettent de vérifier des modèles, de prototyper, de faire des prototypes numériques tout ça à moindre cout (0€ la plus part du temps c'est non négligeable !
En plus ça permet de travailler très vite et d'arriver à la phase de fabrication en étant très sur de soit tout en éliminant la majeur partie des erreurs.
Vous n'avez pas beaucoup de budget, encore moins de moyen de fabrication. Je pense que vous n'allez pas vous embêter à fabriquer 15 versions d'une même pièce avant de trouver la bonne...
Je pense que vous sous estimez grandement le coût du projet... La moindre pièce à usiner peut chiffrer dans les centaines d'euros, autant être sur qu'elle sera bonne, il est hors de question de recommencer 
Je serais vous je modéliserais entièrement en CAO la meca du robot, ça permet de tester toutes les contraintes numériquement, de dimensionner les couples, vitesses, les encombrements etc...
Comme ça, une fois que votre projet sera mécaniquement finis le reste ne sera plus qu'une formalité en terme de coûts.
#85461 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 09:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ah bah mon avis sur la question est très tranché ! Il faut travailler avec CATIA, CRÉO ou SolidWorks. Mais bien entendu ces logiciels sont difficilement accessible :/
#86039 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 22 juillet 2017 - 09:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'espère que vous avez un arbre dans votre roulement et que c'est n'est pas la tige de la vis qui en fait office
Eddit : Mea Culpa, j'avais pas vu la tête de la pièce, bon boulot, mais surement pas assez rigide
#85458 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 08:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pourquoi ne fonctionnerait il pas ? Si tu fais bien ton travail il n'y a pas de raison. Ok c'est jamais parfaitement opérationnel du premier coup mais à ce stade la les modifications ne sont pas critiques ni majeures !
Et puis personnellement, mes conceptions CAO aboutissement quasiment tout le temps à quelque chose d'opérationnel
Et puis personnellement, mes conceptions CAO aboutissement quasiment tout le temps à quelque chose d'opérationnel
#85439 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 04:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Allez c'est le presqu'ingénieur qui parle (j'essaye de vous donner des conseils pour mener à bien ce projet) :
Je vais tenter de vous expliquer comment une entreprise aurait abordé le projet que vous abordez actuellement.
Premièrement il faut faire un cahier des charges, je sais c'est quelque chose qu'on entend parler partout et tout le temps sans vraiment savoir à quoi ça peut fondamentalement servir. Et bien pour commencer ça permet de coucher quelque par la définition du projet, il faut mettre toutes ses caractéristiques. Ca permet d'éviter les cas ou un employer, un intervenant se ramène avec quelque chose dors sujet (genre "Bah oui je l'ai modélisé avec 3 jambes, c'est pas ce qu'on avait dit ?"). Le cahier des charges fait fois, il faut qu'il soit complet, c'est un document légal qui une fois qu'il a été signer par tous permet de donner un cadre de travail, des objectifs et des enjeux. Ca vous permet aussi de commencer à répartir votre budget, bah oui combien vous allez mettre dans la méca ? les moteurs ? l’électronique etc... Voyez ce cahier des charges comme une espèce de rapport préliminaire ou vous allez coucher vos premiers concepts/idées etc... C'est pas très compliqué à faire et vous pouvez trouver plein d'infos dessus sur internet.
Une fois que les bases sont bien claires dans vos tête mais aussi dans les têtes de toutes les personnes qui seront amené à travailler sur le sujet il faut :
- Faire une modélisation CAO de toutes les pièces.
- Réaliser l'assemblage de ces pièces (déjà à cette étape vous allez vous rendre compte de toutes les incohérences de montages entre vos pièces)
- Réalisé une étude cinématique et dynamique de votre robot assemblé (tout cela est possible avec un bon logiciel de CAO)
- Réaliser une étude des contraintes de vos pièces (bah oui il faudra pas que tout casse dès les premiers pas du robot)
- Faire de la rétro-conception (paufiner les paramètre, redessiner certaines pièce et améliorer les concepts en fonction des simulations)
Comprenez bien que j'insiste la dessus parce que toutes les étapes du dessus ne coute absoluement rien, 0€ euros et le projet d'un point de vu mécanique (et c'est ce qui coute le plus cher) est quasiment finit.
Bien sur on peut intégrer des essais avec des petits prototypes par ci par la mais je trouve qu'avant d'investir le moindre centime il faut être parfaitement sur de ce qu'on à conçu. Et pour ça la CAO est un outil très puissant.
Voilà ne le prenez pas mal, ce sont justes des conseils, j'ai vraiment envie que vous réussissez ce que vous nous avez vendu.
#85452 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 05 juillet 2017 - 07:37
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je suis d'accord avec toi Oracid mais leur cas n'est pas le même cas si je peux me permettre. Avec les Lego c'est limite le raisonnement inverse, la meca est adaptative, robuste, efficace et peut cher. Tu peux avec cette solution te permettre de faire beaucoup de prototypes.
Eux c'est différents, c'est à peine si ils ont le budget de fabriquer une seule version du robot, il hors de question de fabriquer 40 prototypes pour améliorer les différents points pas à pas
Et puis je suis d'accord, chaque choses ont leurs limites mais je peux t'assurer qu'il aurait été possible de dimensionner la puissance des moteurs ton char avec une solution CAO.
Après c'est la solution que je défend parce que c'est mon métier mais je suis conscient qu'il y a d'autre façon de faire
Eux c'est différents, c'est à peine si ils ont le budget de fabriquer une seule version du robot, il hors de question de fabriquer 40 prototypes pour améliorer les différents points pas à pas
Et puis je suis d'accord, chaque choses ont leurs limites mais je peux t'assurer qu'il aurait été possible de dimensionner la puissance des moteurs ton char avec une solution CAO.
Après c'est la solution que je défend parce que c'est mon métier mais je suis conscient qu'il y a d'autre façon de faire
#111198 Vidéos Bipèdes
Posté par
sur 21 septembre 2020 - 12:08
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'adore ces mecs, leurs robots sont vraiment top
#80390 Vidéos Bipèdes
Posté par
sur 15 mars 2017 - 09:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je suis tellement déçu de ce robot... Mécaniquement parlant et pareil pour le design final :/
#99791 Vidéos Bipèdes
Posté par
sur 04 novembre 2018 - 03:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Trop sympa la première vidéo ! Les robots nous permettent des formes/cinématique/combinaisons de mouvement complètement nouveau. Des fois essayer de penser en dehors des sentiers battus peut mener à des résultats formidables. C'est ce que j'aime avec ton mécanisme, c'est nouveau, on a jamais vu ça et ça peut donner des truc cool, wait and see
#80486 Vidéos Bipèdes
Posté par
sur 18 mars 2017 - 12:14
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je ne veux pas faire mon rabat-joie au sujet de James Burton, j'adore vraiment ce qu'il fait et je regarde toutes ses videos !
C'est juste que je trouve qu'avec son talent il pourrait aller plus en profondeur dans ses projets. Il pourrait passer plus de temps à faire une mécanique vraiment parfaite parce que c'est son grand défaut, il est très bon en électronique/programmation mais sa méca n'est pas au même niveau.
La plus part de ses pièces pourraient être plus fine, plus légère, ça manque d'ergonomie, de rigidité, de légèreté. Il investit énormément dans son bipède alors qu'il utilise des moteurs de perceuses qui sont déjà à leur limite de capacité. J'aurais personnellement investit un peu plus pour avoir des moteurs qui tiennent la route.
Je trouve qu'il survole trop ses projets, je préférerais qu'il se concentre pleinement sur un, qu'il essaye d'avoir le meilleure resultat possible pour enfin changer. Et puis je suis déçu (quoi, ça s'est vu ?  ) qu'il décide de le transformer en Bender. *son bipède était magnifique comme ça ! Pas besoin de changer son apparence pour faire plaisir au fan et au personne qui sont plus impressionné de voir une copie de quelque chose qui existe déjà, plutôt qu'un prototype unique qui possède ses défauts et avantages.
) qu'il décide de le transformer en Bender. *son bipède était magnifique comme ça ! Pas besoin de changer son apparence pour faire plaisir au fan et au personne qui sont plus impressionné de voir une copie de quelque chose qui existe déjà, plutôt qu'un prototype unique qui possède ses défauts et avantages.
Après je respect vraiment son travail, il m'impressionne de jour en jour.
#88272 Vidéo TED
Posté par
sur 03 octobre 2017 - 08:34
dans
Bric-à-brac
Bonjour à tous,
Je ne sais pas trop ou poster ça, j'espère ne pas me tromper !
Voici la vidéo les plus impressionnante que j'ai vu sur des robots, il fallait que je vous partage ça !! :
Bonne soirée
#109474 unity 3D
Posté par
sur 10 mai 2020 - 02:12
dans
Logiciels
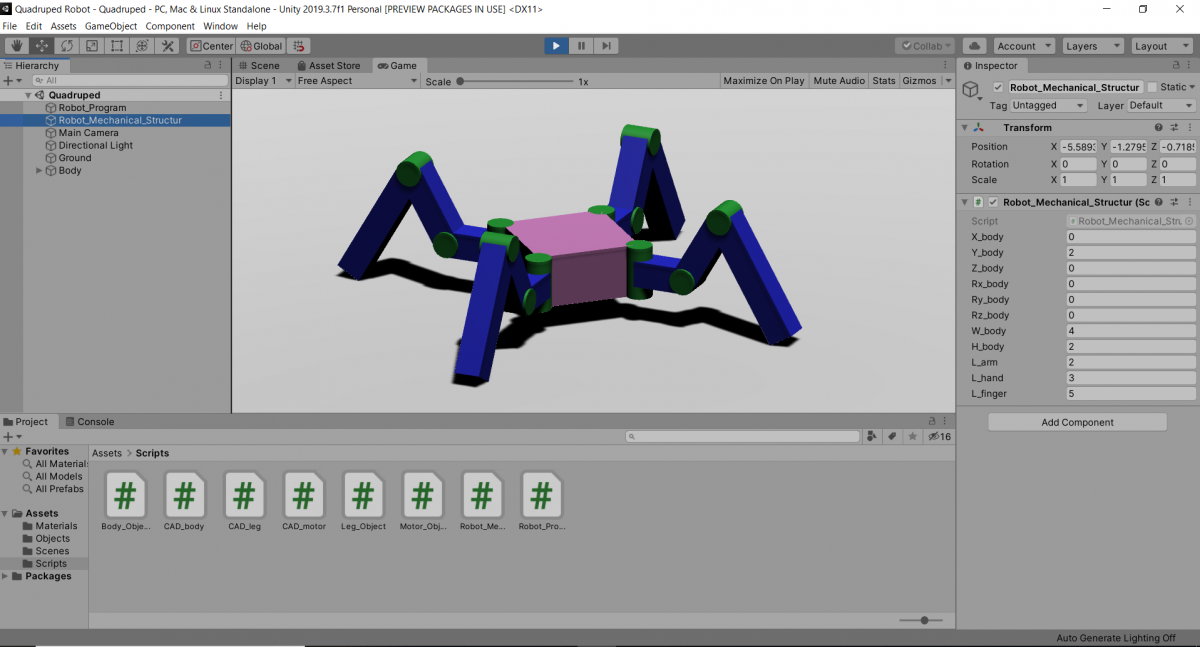
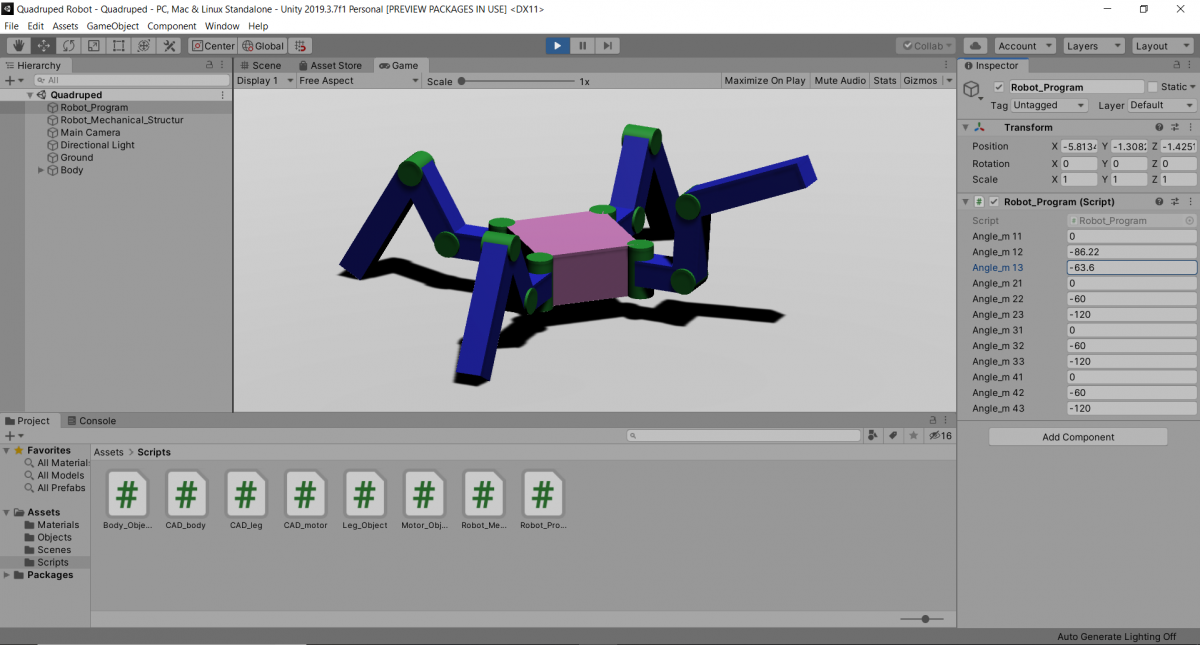
Je peux vous publier rapidement mes avancements sous unity.
J'ai pu créer une structure méca d'un quadruped sous forme d’araignée entièrement paramétrable, ou j'ai accès (comme sur un vrai robot) aux variables pilotant l'orientation de chacun des 12 moteurs.
Je bosse encore sur les équations de cinématique inverse que je pourrais directement implémenter sous unity afin de vérifier si tout fonctionne.
Ensuite je pourrais simuler un environement 3D et coder des boucles d'asservissements au robot tout ça sur le model 3D dans Unity.
L'idée ici c'est de vraiment faire toute une étude sans débourser un centime en élements mécanique.
Derrière toute la partie calcul se fera sur un ordi et je n'aurais plus qu'à envoyer au robot les orientations des différents angles (hardware embarqué très simplifié)
Image(s) jointe(s)
#109483 unity 3D
Posté par
sur 10 mai 2020 - 03:45
dans
Logiciels
Franchement je trouve unity très ergonomique et facile de prise en main, javais commencé à coder un jeux en java, jai refais en 3h sur unity léquivalent de plusieurs 10 aines dheure a la main (le moteur physique simplifie grandement)
Je ne connais pas les autres logiciels donc je ne serais te dire mais unity est très puissant ça ne fait pas de doute (dautant quinternet regorge de tuto/formations).
Jaime bien laspect des araignée et jai pas le budget pour un hexapod donc pourquoi pas lui mettre que 4 jambes et ca change des cinématiques à la open dog
Je ne connais pas les autres logiciels donc je ne serais te dire mais unity est très puissant ça ne fait pas de doute (dautant quinternet regorge de tuto/formations).
Jaime bien laspect des araignée et jai pas le budget pour un hexapod donc pourquoi pas lui mettre que 4 jambes et ca change des cinématiques à la open dog
#82735 [FroZen] Les Tanks RC , ReEvolved
Posté par
sur 28 avril 2017 - 07:22
dans
Robots roulants, chars à chenilles et autres machines sur roues
Combien de watt tes moteurs ? J'aimerais beaucoup aboutir sur une version comme le tiens. Très beau travail, bravo !
#82749 [FroZen] Les Tanks RC , ReEvolved
Posté par
sur 29 avril 2017 - 10:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
Moi ça ne me dérangerais pas du tout que mes créations (du moins quand mon petit tank sera finis) qu'il soit proposé sur la boutique et si quelqu'un l'achète je lui fabrique et lui envoie. Comme ça je me fait un chouilla 'argent et la boutique touche une commission. Si plusieurs personne sont dispo on pourrait vendre des kits de robots ou des robots entier conçus par la communauté, ça pourrait être cool
Après c'est qu'une idée
#82738 [FroZen] Les Tanks RC , ReEvolved
Posté par
sur 28 avril 2017 - 09:01
dans
Robots roulants, chars à chenilles et autres machines sur roues
Si tu as des machines (d'après ce que je vois) et que tu vis pas bien loin de la region Parisienne je serais vraiment chaud pour te donner un coup de main en modelisation etc (même si je pense avoir plus à apprendre de toi que l'inverse) si en contre partie je pouvais travailler avec autre chose que du PLA ^^
#47806 [Défi Robotique] Écrire "Robot"
Posté par
sur 17 août 2012 - 12:00
dans
Concours tournois et autres compétitions
Si mon Robot est finit d'ici là, j'essayerais d'y participer  Juste, le robot doit le faire de façon autonome ? Ou si il est commandé ça passe aussi ?
Juste, le robot doit le faire de façon autonome ? Ou si il est commandé ça passe aussi ?
Juste, le robot doit le faire de façon autonome ? Ou si il est commandé ça passe aussi ?




