Bonjour,
Robot quadrupède jump:
Il y a 148 élément(s) pour macerobotics (recherche limitée depuis 24-mai 13)
 Posté par
sur 08 mai 2019 - 11:14
dans
Général
Posté par
sur 08 mai 2019 - 11:14
dans
Général
Bonjour,
Robot quadrupède jump:
Posté par
sur 30 mai 2016 - 07:39
dans
Electronique
Bonjour,
Le SPI peut aussi être utilisé en mode daisy chain, avec donc un seul CS.
Posté par
sur 26 septembre 2016 - 07:04
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je te souhaite aussi, un bon rétablissement Guigz65.
Posté par
sur 09 octobre 2019 - 07:30
dans
TRR : Toulouse Robot Race
Félicitation !
Posté par
sur 18 août 2019 - 09:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Félicitation pour le robot quadrupède avec les pattes delta en Lego.
Je travaille aussi sur ce type de pattes et connais la complexité de la cinématique inverse. Je ne connais pas les servomoteurs SG90B, j'utilise les MG91 (2.2kg/cm).
Posté par
sur 14 septembre 2019 - 08:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Tu peux utiliser les capteurs de distance de type VL53L0X (2m) ou VL53L1X (4m) utilisant une technologie Time of Flight.
Posté par
sur 21 avril 2016 - 12:39
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut Micky511,
Oui il faut un régulateur de tension et une batterie (exemple 3 cellules lipo : 3x3,7V = 11,1 V)
La tension pour les AX12 : 9 à 12V en direct sur la batterie.
La CM700 nécessite à un régulateur de tension +5V, type 7805 pour débuter.
Posté par
sur 27 octobre 2020 - 07:42
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Super l'épaule de ton quadrupède !
Posté par
sur 27 décembre 2019 - 07:49
dans
Bancs de tests et autres machines d'expérimentations
Posté par
sur 10 décembre 2016 - 05:59
dans
Lego
Félicitations pour cet ouvrage.
Posté par
sur 06 avril 2016 - 11:54
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut Captain,
Les Lego c'est très bien pour commencé.
Tu peux géré les 2 moteurs CC avec un pond en H de type L293D. Il existe beaucoup de shield pour commandé deux moteurs CC.
Regarde ici pour les revendeurs : http://www.robot-maker.com/forum/topic/10081-la-liste-ou-achetez-vous-principalement-les-composants-de-vos-robots/
tourne t'il par le biais d'un servomoteur?
oui, un servomoteur de modélisme.
Sinon, si tu débute en robotique tu peux commencé par sa :http://www.robot-maker.com/forum/tutorials/article/10-roby/
Posté par
sur 05 avril 2016 - 06:59
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut,
Sinon, tu peux commencer par juste 2 roues motrices de type différentielle (comme un char)
Posté par
sur 17 mai 2016 - 11:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut McVapFm,
Le kit Zumo ou l'autre châssis avec 2 roues ne va pas changer grand chose pour faire un robot mobile autonome.
Si tu débute, je te conseille la version avec 2 roues en mode différentielle.
Posté par
sur 11 octobre 2019 - 07:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Les deux capteurs ToF VL53L0X ont correctement fonctionné à Toulouse. Ils étaient placés sous l'équerre alu, un peu protéger du soleil.
Posté par
sur 10 octobre 2019 - 06:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
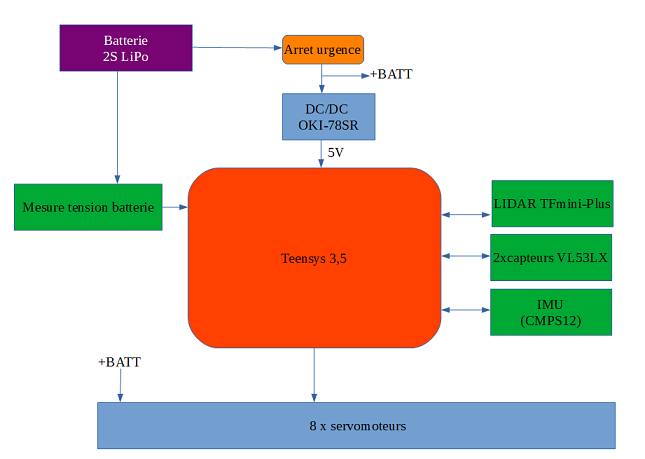
Je vous présente le robot quadrupède Borvo ayant participé à la Toulouse Robot Race 2019.

Voici les caractéristiques techniques du robot :
Les deux capteurs VL53L0X permettent de recaler le robot avec les bordures de la piste.
Le capteur Lidar TFmini-Plus permet de détecter le portique de fin de la course.
Synoptique de la carte électronique:
Le robot Doggom'a inspiré pour la réalisation de ce robot quadrupède.

Posté par
sur 15 avril 2016 - 05:45
dans
Et si vous vous présentiez?
Bonjour à tous,
Je m'appelle Nicolas et j'habite en Bretagne. Je suis venu sur ce forum afin de partager ma passion pour la robotique et de découvrir/rencontrer les projets des makers.
Expériences à la coupe de France de robotique et dans l’électronique industrielle.
J'ai créé une petite entreprise de robotique afin de vivre de ma passion.
Passion :
Merci,
Posté par
sur 28 décembre 2019 - 09:25
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
J'ai réalisé une nouvelle structure en pmma 3 mm pour le robot puis des pieds en impression 3D. De plus la structure des pattes est modifiée pour gagner en rigidité. Une carte électronique de contrôle avec un microcontrôleur est aussi en cours de conception afin de remplacer la carte de prototypage veroboard.

Posté par
sur 29 juin 2016 - 08:18
dans
Electronique
Salut Lord,
Est ce que tu connais les modules Xbee (porté 30m) en bande 2,4 Ghz, très facile avec une carte Arduino.
Il y a aussi version pro, avec 100 mètre de portée.
Posté par
sur 15 avril 2016 - 08:24
dans
Et si vous vous présentiez?
merci mike118.
Posté par
sur 16 avril 2016 - 07:30
dans
Et si vous vous présentiez?
Salut Andarkam,
Merci mike118, oui je fais des robots mobile programmable basé sur une carte Raspberry Pi.
Mace Robotics est une petite entreprise individuelle, donc je fais :
oui, un voyage inoubliable ! je conseilles ce type de voyage a tout le monde.
Posté par
sur 22 décembre 2016 - 02:11
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut,
C'est à la maison des associations :
6 cours des Alliés
35000 Rennes
Le mercredi et le samedi de 14H à 18H, Open lab.
Posté par
sur 30 janvier 2017 - 01:15
dans
Et si vous vous présentiez?
Bienvenue et félicitation pour ton petit robot d'exploration.
Posté par
sur 22 mai 2016 - 07:46
dans
Les annonces Robot Maker
Super news !
Posté par
sur 01 août 2016 - 06:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut dakota77,
Tu peux faire l'acquisition des impulsions directement avec une carte Arduino des encodeurs moteurs.
En utilisant les interruptions, par exemple sur la carte Arduino Uno, ce sont les pins numérique n° 2 et 3.
Ensuite tu place ton compteur-décompteur d'une nombre d'impulsion dans le traitement de cette interruption.
Posté par
sur 22 décembre 2016 - 08:19
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour,
Le labFab de rennes est un fab lab avec découpe laser, impression 3D, cartes de prototypage arduino Pi et un robot poppy. C'est au labFab que je réalise mes découpes laser pour les robots MRPi1 et MRduino.




