Contenu de Ulysse
Il y a 481 élément(s) pour Ulysse (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#84084 Yorkshire, mon petit quadrupède
 Posté par
sur 27 mai 2017 - 08:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 27 mai 2017 - 08:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#82967 Yorkshire, mon petit quadrupède
Posté par
sur 04 mai 2017 - 07:38
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je pense aussi que c'est la bonne démarche et que tout cela est lié. Je suivrai avec attention !
#82993 Yorkshire, mon petit quadrupède
Posté par
sur 04 mai 2017 - 04:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Mais oui, il y a des tonnes de quadrupèdes de tout gabarie, des quantités de vidéos. L'art va consister à se démarquer en faisant quelque chose de nouveau, s'inspirer sans copier/coller.
#83389 Yorkshire, mon petit quadrupède
Posté par
sur 10 mai 2017 - 06:14
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ha oui ! Joli !
#94715 Wall-E
Posté par
sur 21 avril 2018 - 08:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
#88512 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 08 octobre 2017 - 08:04
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#88445 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Posté par
sur 07 octobre 2017 - 12:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
"Voilà, il ne reste plus qu'à coder".
Sais pas quoi vous dire, bonne ascension de votre Everest.
#94967 Vision artificielle
Posté par
sur 28 avril 2018 - 09:00
dans
Intelligence artificielle
Détecter un objet ?
Reconnaître un objet ?
Ce n'est pas la meme technique
#75632 Vidéos Bipèdes
Posté par
sur 27 octobre 2016 - 05:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le Japon ne cessera jamais de nous surprendre, surtout en matière de robots. Sa dernière innovation, c’est Kengoro : un robot humanoïde d’1m70, conçu par l’Université de Tokyo. Capable de faire des pompes à la manière d’un humain, il évite la surchauffe de ses moteurs en… transpirant .
Le texte complet : http://fr.ubergizmo.com/2016/10/25/kengoro-robot-pompes-transpire-mieux.html
#84425 Vidéos Bipèdes
Posté par
sur 06 juin 2017 - 10:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Ça me fait souvent l'effet inverse. Lorsque je vois une réalisation je me dis "C'est déjà fait, à quoi bon copier ? Voyons voir quelque chose de nouveau".
- "Mon dieu qu'il est bête cet Ulysse ! " 
#98220 Version réduite et abordable du rover Curiosity
Posté par
sur 06 août 2018 - 07:37
dans
Exploration spatiale
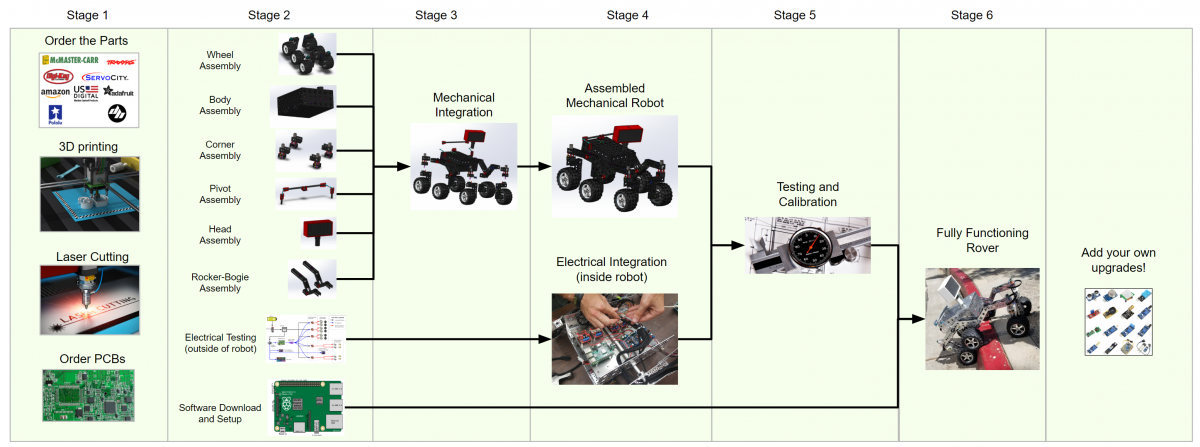
Le Jet Propulsion Laboratory de la NASA (avec CalTech), qui a construit l'astromobile/le rover Curiosity pour explorer la planète Mars, a publié sur GitHub les plans d'une version réduite et abordable de ce véhicule sous licence Apache v2.
Vous pouvez donc l'étudier, le construire ou l'améliorer !
Le cerveau utilisé est un RaspBerry Pi. Vous pouvez le contrôler via une application Android.
NdM. : ce rover est une version réduite (36cm, 11kg, 17cm/s) de Curiosity (2,7m, 899kg et 4 cm/s sur Mars). Il est conçu pour pouvoir être réalisé avec des composants du commerce. La publication a été réalisée pour « inspirer la future génération des scientifiques, ingénieurs et roboticiens pour nous aider à explorer et découvrir notre système solaire (et au-delà !) ». L'utilisation de la licence Apache v2 semble contredite par les critères supplémentaires suivant : être âgé de plus de 18 ans, décharge de responsabilité et pas d'utilisation commerciale. Le JPL explique par ailleurs avoir produit précédemment une version réduite de Curiosity à des fins éducatives (un mini-rover baptisé ROV-E), pour les classes, musées et événements scolaires. Et face au succès, ils ont décidé de produire un modèle inspirant et réalisable pour moins de 2500 USD (environ 2160 EUR).
Un lien vers l'article original
#83687 Upgraded Roboceratops
Posté par
sur 18 mai 2017 - 08:57
dans
News dans le domaine de la robotique
J'ai probablement posté le message de trop. Genre la goute d'eau ...
#83646 Upgraded Roboceratops
Posté par
sur 17 mai 2017 - 01:03
dans
News dans le domaine de la robotique
#83665 Upgraded Roboceratops
Posté par
sur 17 mai 2017 - 08:02
dans
News dans le domaine de la robotique
Pas mal, mais fil à la patte et télécommande...
... et ?
#83680 Upgraded Roboceratops
Posté par
sur 18 mai 2017 - 07:22
dans
News dans le domaine de la robotique
Il n'y avait aucune intension de comparer ce projet avec ce que tu fait. J'ai juste trouvé ça mignon et très bien fait, je partage sans autre but.
#83620 [Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Posté par
sur 16 mai 2017 - 08:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
un peu comme la NASA avec ses rovers martiens !
C'est marrant, j'ai pensé la même chose quand j'ai téléchargé par wifi une mise à jour de l'odométrie ( arduino micro) alors que Pablo était à l'autre bout du jardin.
#87634 [Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Posté par
sur 14 septembre 2017 - 10:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Au passage, bravo pour ton projet, je fais habituellement partie de la masse silencieuse des lecteurs mais c'est l'occasion de le dire

je plussoie
#85126 [Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Posté par
sur 26 juin 2017 - 06:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui c'est tout bon AI2. C'est ce qu'on fait de mieux si on ne veut pas toucher à Android Studio ou Xamarin.
#89876 [Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Posté par
sur 11 novembre 2017 - 10:52
dans
Robots roulants, chars à chenilles et autres machines sur roues
#100849 [Char] Exploration vide sanitaire
Posté par
sur 16 décembre 2018 - 02:47
dans
Robots roulants, chars à chenilles et autres machines sur roues
Un bon sujet. Sur les termes utilisés :
filoguidage : on parle bien d'une liaison électrique filaire en vue d'échange d'informations (dans ton cas je recommande l'Ethernet qui permet tout sans problème de distance ).
Char et chenilles : je ne consulte plus ces sujets, j'avais 15 ans quand mes chars en MECCANO (filoguidés) grimpaient les escaliers de la maison. Mais après avoir grimpé, descendu, grimpé 50 fois de suite on passe à autre chose. Dans le cas d'exploration de VS la mécanique n'est pas le plus dur, n'importe quel jouet pour gamin du genre voiture télécommandée franchi les obstacles caillouteux. En revanche pour moi un joujou en plastique n'est pas assez costaud pour tirer un câble. C'est le câble qui retiendra le bot patinant sur les graviers. Faut du plus lourd ! Le net regorge d'exemples, trop pour tout lister
Si on veut du léger sans fil, on peut aller voir InspectorBot qui fait le travail avec sa caméra sur le dos orientée vers le haut.
Mais Quattrack qui annonce 62° en grimpant sur une serviette de toilette, puis une rampe avec quasiment des barreaux d'échelle, je lui propose d'ajouter un treuil pour atteindre 90°.
Si on veut tirer un câble, je propose un modèle lourd ( poids de la batterie et des moteurs ), un châssis en alu , une liaison Ethernet pour la télécommande + la télémétrie + le retour vidéo (le câble peut servir à récupérer le rover au cas où) , les roues et l'unité centrale c'est comme on veut.
#74470 [Abandonné] Mk V, Le Grand Petit Frère - Char en acier
Posté par
sur 01 octobre 2016 - 04:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Rogntudju c'est du sérieux ! C'est pour Mad Max 5 ?
Chapeau pour cette belle base, ça donne envie d'en voir plus..
#79050 [2WD]RobArchi X.XX
Posté par
sur 10 février 2017 - 10:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux peut être surveiller une bonne affaire. .
#79038 [2WD]RobArchi X.XX
Posté par
sur 09 février 2017 - 10:16
dans
Robots roulants, chars à chenilles et autres machines sur roues
#89073 [2WD] Robot de compagnie
Posté par
sur 19 octobre 2017 - 11:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'aimerais bien avoir des nouvelles fraiches et rassurantes sur ce bon projet 
#84829 [2WD] Robot de compagnie
Posté par
sur 18 juin 2017 - 06:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
en fait je cherche a faire rentrer de l'inutile, dans la robotique, mais aussi de l'art, du romantique! fabriquer un robot qui ne sert arien de concret
Ha, je comprends tout à fait. Quand je réponds à ceux qui m'interrogent sur ma valise à roulette que ça ne sert qu'à faire des dessins, faut voir leur moue 
Excellent concept, j'adhère.




